前言
最近在学习 5G NR 的仿真,无论是控制信道还是数据信道,都涉及到信道估计的相关算法,如 LMMSE 和 基于 PDP 的 LMMSE 算法等。并且常常把信道估计和信道均衡搞混,因为都有 MMSE 算法?于是打算从基本概念、常用算法及其公式推导等方面学习一下信道估计理论,并将学习的博客资料整理下来。本文主要介绍基于参考信号的信道估计算法:LS、MMSE 和 LMMSE。其中 LS 和 MMSE 部分的误差分析推导来自于:LS信道估计和MMSE信道估计部分公式推导。
修改记录
2024/03/14
- 更新了LMMSE公式中\(\beta\)的计算方法;
- 增加了工程上信道自相关矩阵的计算方法(仅限于多径信道,需要知道信道的功率时延谱和抽头个数)
一、基本概念
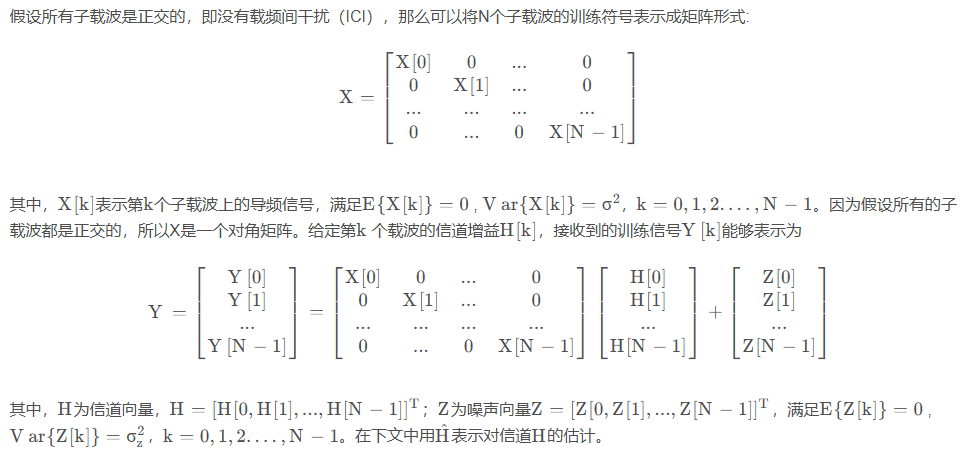
二、基本假设
![]()
考虑一般的频域接收信号模型:
\[\mathbf{y}=\mathbf{X h}+\mathbf{z}
\]
其中,\(\mathbf{y}\in\mathbb{C}^{N\times1}\) 为接收信号向量,\(\mathbf{h}\in\mathbb{C}^{M\times1}\) 为信道向量,\(\mathbf{X}\in\mathbb{C}^{N\times M}\) 为发送信号矩阵(导频),\(\mathbf{z}\in\mathbb{C}^{N\times 1}\) 为噪声向量,且 \(\mathbf{z}\sim\mathcal{CN}(\mathbf{0},\sigma_z^2\mathbf{I})\)。
三、LS 算法
3.1 公式推导
LS 算法基于最小二乘准则,优化目标是实际观测量 \(\mathbf{y}\) 与估计观测量 \(\mathbf{X\hat{h}}\) 间误差最小。即令下述目标函数最小化:
\[\begin{aligned}
\mathrm{J}(\hat{\mathbf{h}})_{\mathrm{LS}}&=||\mathbf{y-X\hat{h}}||^2\\
&=(\mathbf{y-X\hat{h}})^\mathrm{H}(\mathbf{y-X\hat{h}})\\
&=\mathbf{y}^{\mathrm{H}}\mathbf{y}-\mathbf{y}^{\mathrm{H}}\mathbf{X}\mathbf{\hat h}-\mathbf{\hat h}^{\mathrm{H}}\mathbf{X}^{\mathrm{H}}\mathbf{y}+\mathbf{\hat h}^{\mathrm{H}}\mathbf{X}^{\mathrm{H}}\mathbf{X}\mathbf{\hat h}
\end{aligned}
\]
令该函数的一阶导为0,即:(这里是标量对向量求导,可以利用矩阵迹的性质,可参考文章:矩阵的迹——性质及运算)
\[\frac{\partial \mathrm{J}(\hat{\mathbf{h}})_{\mathrm{LS}}}{\partial \hat{\mathbf{h}}}=-(\mathbf{y}^{\mathrm{H}}\mathbf{X})^{\mathrm{T}}+(\mathbf{\hat h}^{\mathrm{H}}\mathbf{X}^{\mathrm{H}}\mathbf{X})^{\mathrm{T}}=0
\]
可得到 LS 信道估计的解:
\[\mathbf{\hat h}_{\mathrm{LS}}=(\mathbf{X}^{\mathrm{H}}\mathbf{X})^{-1}\mathbf{X}^{\mathrm{H}}\mathbf{y}
\]
这里求解的方法除了求导以外,还可以利用配方法和投影法,另外两种方法可以参考这位大佬的文章:LS信道估计和MMSE信道估计部分公式推导。
当发送信号矩阵 \(\mathbf{X}\) 满秩时,可化简为:
\[\mathbf{\hat h}_{\mathrm{LS}}=\mathbf{X}^{-1}\mathbf{y}
\]
3.2 估计误差
LS 估计算法忽略了噪声的影响,因为它使用的是实际观测量与估计观测量的误差,这并不能精确的代表估计量的真值与估计值的误差。从其估计值和真实值间的均方误差可以看出来:
\[\begin{aligned}
\varepsilon_{\mathrm{LS}} &=\mathbb{E}\left\{\left\|\hat{\mathbf{h}}_{\mathrm{LS}}-\mathbf{h}\right\|^{2}\right\} \\
&=\mathbb{E}\left\{\left\|\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1} \mathbf{X}^{\mathrm{H}}(\mathbf{X h}+\mathbf{z})-\mathbf{h}\right\|^{2}\right\} \\
&=\mathbb{E}\left\{\left\|\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1} \mathbf{X}^{\mathrm{H}} \mathbf{z}\right\|^{2}\right\} \\
&=\mathbb{E}\left\{\left(\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1} \mathbf{X}^{\mathrm{H}} \mathbf{z}\right)^{\mathrm{H}}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1} \mathbf{X}^{\mathrm{H}} \mathbf{z}\right\} \\
&=\mathbb{E}\left\{\operatorname{tr}\left(\mathbf{z}^{\mathrm{H}} \mathbf{X}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-2} \mathbf{X}^{\mathrm{H}} \mathbf{z}\right)\right\} \\
&=\operatorname{tr}\left(\mathbf{X}^{\mathrm{H}} \mathbb{E}\left\{\mathbf{z} \mathbf{z}^{\mathrm{H}}\right\} \mathbf{X}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-2}\right) \\
&=\operatorname{tr}\left(\sigma_{z}^{2}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1}\right)\\
&=\frac{\sigma_z^2}{\sigma_x^2}\\
&=\frac{1}{\mathrm{SNR}}
\end{aligned}
\]
由此可知,在低信噪比下,LS 估计算法的估计误差将会非常大。
四、MMSE 算法
4.1 公式推导
MMSE 算法基于最小均方误差准则,以信道估计值和真实值误差最小化为优化目标,由滤波矩阵和接收信号向量组成,即 \(\mathbf{\hat h}_{\mathrm{MMSE}}=\mathbf{W}\mathbf{y}\)。其目标函数为:
\[\begin{aligned}
\mathrm{J}(\mathbf{W})&=\mathbb{E}\left\{||\mathbf{\hat{h}-h}||^2\right\}\\
&=\mathbb{E}\left\{(\mathbf{\mathbf{W}\mathbf{y}-h})^\mathrm{H}(\mathbf{\mathbf{W}\mathbf{y}-h})\right\}\\
&=\mathbb{E}\left\{\mathbf{y}^{\mathrm{H}}\mathbf{W}^{\mathrm{H}}\mathbf{W}\mathbf{y}-\mathbf{y}^{\mathrm{H}}\mathbf{W}^{\mathrm{H}}\mathbf{h}-\mathbf{h}^{\mathrm{H}}\mathbf{W}\mathbf{y}+\mathbf{h}^{\mathrm{H}}\mathbf{h}\right\}\\
&=\mathbb{E}\left\{\operatorname{tr}\left(\mathbf{y}^{\mathrm{H}}\mathbf{W}^{\mathrm{H}}\mathbf{W}\mathbf{y}-\mathbf{y}^{\mathrm{H}}\mathbf{W}^{\mathrm{H}}\mathbf{h}-\mathbf{h}^{\mathrm{H}}\mathbf{W}\mathbf{y}+\mathbf{h}^{\mathrm{H}}\mathbf{h}\right)\right\}
\end{aligned}
\]
同样利用标量对向量求导的运算方法,令其一阶导为0,得到
\[\frac{\partial \mathrm{J}(\mathbf{W})}{\partial \mathbf{W}}=\mathbb{E}\left\{(\mathbf{yy}^{\mathrm{H}}\mathbf{W}^{\mathrm{H}})^{\mathrm{T}}-(\mathbf{y}\mathbf{h}^{\mathrm{H}})^{\mathrm{T}}\right\}=0
\]
因此对应的滤波矩阵为
\[\begin{aligned}
\mathbf{W}&=\mathbb{E}\left\{\mathbf{hy}^{\mathrm{H}}\right\}\mathbb{E}\left\{\mathbf{yy}^{\mathrm{H}}\right\}^{-1}\\
&=\mathbf{R}_{\mathbf{hy}}\mathbf{R}_{\mathbf{yy}}^{-1}
\end{aligned}
\]
其中,
\[\begin{aligned}
\mathbf{R}_{\mathbf{h y}} &=\mathbb{E}\left\{\mathbf{h} \mathbf{y}^{\mathrm{H}}\right\}=\mathbb{E}\left\{\mathbf{h}(\mathbf{X} \mathbf{h}+\mathbf{z})^{\mathrm{H}}\right\} \\
&=\mathbb{E}\left\{\mathbf{h} \mathbf{h}^{\mathrm{H}}\right\} \mathbf{X}^{\mathrm{H}}+\mathbb{E}\left\{\mathbf{h} \mathbf{z}^{\mathrm{H}}\right\} \\
&=\mathbf{R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}} \\
\mathbf{R}_{\mathbf{yy}} &=\mathbb{E}\left\{\mathbf{y} \mathbf{y}^{\mathrm{H}}\right\}=\mathbb{E}\left\{(\mathbf{X} \mathbf{h}+\mathbf{z})(\mathbf{X h}+\mathbf{z})^{\mathrm{H}}\right\} \\
&=\mathbb{E}\left\{\mathbf{X h h ^ { \mathrm { H } }} \mathbf{X}^{\mathrm{H}}\right\}+\mathbb{E}\left\{\mathbf{z} \mathbf{z}^{\mathrm{H}}\right\} \\
&=\mathbf{X R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}}+\sigma_{z}^{2} \mathbf{I}
\end{aligned}
\]
因此,MMSE 信道估计值为:
\[\begin{aligned}
\hat{\mathbf{h}}_{\mathrm{MMSE}}&=\mathbf{R}_{\mathbf{hy}}\mathbf{R}_{\mathbf{yy}}^{-1}\mathbf{y}\\
&=\mathbf{R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}}\left(\mathbf{X R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}}+\sigma_{z}^{2} \mathbf{I}\right)^{-1}\mathbf{y}\\
&=\mathbf{R}_{\mathbf{hh}}\left[\mathbf{X}^{-1}\left(\mathbf{X R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}}+\sigma_{z}^{2} \mathbf{I}\right)(\mathbf{X}^{\mathrm{H}})^{-1}\right]^{-1}\mathbf{X}^{-1}\mathbf{y}\\
&=\mathbf{R}_{\mathbf{hh}}\left[\mathbf{R}_{\mathbf{hh}}+\sigma_z^2\left(\mathbf{X}^{\mathbf{H}}\mathbf{X}\right)^{-1}\right]^{-1}\mathbf{X}^{-1}\mathbf{y}\\
&=\mathbf{R}_{\mathbf{hh}}\left[\mathbf{R}_{\mathbf{hh}}+\sigma_z^2\left(\mathbf{X}^{\mathbf{H}}\mathbf{X}\right)^{-1}\right]^{-1}\mathbf{\hat h_{\mathrm{LS}}}
\end{aligned}
\]
注意:最后一个等号满足的条件是 \(\mathbf{X}\) 满秩。
4.2 估计误差
MMSE 算法考虑了噪声的影响,其估计值与真实值之间的均方误差为
\[\begin{aligned}
\varepsilon_{\mathrm{MMSE}}&=\mathbb{E}\left\{(\mathbf{\hat h-h})^{\mathrm{H}}(\mathbf{\hat h-h})\right\}\\
&...\\
&=\sigma_z^2\operatorname{tr}\left\{\mathbf{R}_{\mathbf{hh}}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{hh}}+\sigma_{z}^{2} \mathbf{I}\right)^{-1} \right\}
\end{aligned}
\]
具体推导过程请参考这位大佬的文章:LS信道估计和MMSE信道估计部分公式推导。此处不再详细描述。
此外,通过比较 LS 和 MMSE 均方误差大小,可以看出在均方误差意义上,MMSE 的性能优于 LS 的性能:
\[\begin{aligned}
\varepsilon_{\mathrm{LS}}-\varepsilon_{\mathrm{MMSE}} &=\sigma_{z}^{2} \operatorname{tr}\left\{\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1}-\mathbf{R}_{\mathbf{hh}}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{hh}}+\sigma_{z}^{2} \mathbf{I}\right)^{-1}\right\} \\
&=\sigma_{z}^{2} \operatorname{tr}\left\{\left(\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{h}}+\sigma_{z}^{2} \mathbf{I}\right)-\mathbf{R}_{\mathbf{hh}}\right)\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{hh}}+\sigma_{z}^{2} \mathbf{I}\right)^{-1}\right\} \\
&=\sigma_{z}^{4} \operatorname{tr}\left\{\left(\mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1}\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{hh}}+\sigma_{z}^{2} \mathbf{I}\right)^{-1}\right\} \\
&=\sigma_{z}^{4} \operatorname{tr}\left\{\left(\mathbf{X}^{\mathrm{H}} \mathbf{X} \mathbf{R}_{\mathbf{hh}} \mathbf{X}^{\mathrm{H}} \mathbf{X}+\sigma_{z}^{2} \mathbf{X}^{\mathrm{H}} \mathbf{X}\right)^{-1}\right\}
\end{aligned}
\]
其中,迹函数中的两个矩阵分别是半正定和正定的,因此该式大于0,故 LS 算法的估计误差大于 MMSE 算法的估计误差。
五、LMMSE 算法
LMMSE 信道估计是在 MMSE 信道估计的基础上做了一次线性平滑。因为随着输入信号和噪声的变化,MMSE 算法需要不断进行矩阵求逆运算(包含两个矩阵求逆),计算量非常大。因此可以考虑将 MMSE 式中的 \(\mathbf{X}^{\mathbf{H}}\mathbf{X}\) 用其均值来替代,可以减少一个矩阵求逆的运算量。
这样做的原因在于:该矩阵是一个 \(M\times M\) 的方阵,对角线上是导频信号的功率值,非对角线元素则是导频信号与其延迟信号的相关,该相关值可近似为满足标准正态分布的信号,即均值为0。故可以用均值来替代原来的矩阵,以损失部分精度为代价,大幅降低计算复杂度。
则对应的 LMMSE 估计值可以表示为
\[\hat{\mathbf{h}}_{\mathrm{LMMSE}}=\mathbf{R}_{\mathbf{hh}}\left[\mathbf{R}_{\mathbf{hh}}+\frac{\beta}{\mathrm{SNR}}\right]^{-1}\mathbf{\hat h_{\mathrm{LS}}}
\]
其中,\(\beta\) 是一个依赖于星座图的常数,\(\beta=E[|x_k|^2]/E[|1/x_k|^2]\);当采用 QPSK 调制时,\(\beta=1\),采用 16QAM 时,\(\beta=17/9\)。
此时每次传输只需要进行一次求逆即可,可以通过 SVD 等方法继续简化,具体推导可见:信道估计之LMMSE估计。
六、工程上的信道自相关矩阵计算方法
查询了一些资料,工程上通常是根据预定的信道模型提前计算出信道自相关矩阵,需要的时候直接读取文件中的值。
考虑多径信道的冲激响应:(信道的多径时延和功率谱是根据特定的信道模型计算得到的)
\[g(\tau)=\sum\limits_{i=0}^{M-1}\alpha_i\delta(\tau-\tau_i)
\]
\(M\) 为冲激响应长度(抽头个数),\(\alpha_i\) 为高斯随机变量且相互独立,其功率时延谱为 \(\theta(\tau_i)\),且假设为指数衰减型谱,即 \(\theta(\tau_i)=C\cdot e^{-\tau_i/\tau_{rms}}\), \(\tau_{rms}\) 为多径信道的均方根时延扩展,\(\tau_i\) 为第 \(i\) 径的时延,因此对应第 \(k\) 个子载波的频域响应可以表示为
\[H_k=\sum\limits_{i=0}^{M-1}\alpha_i e^{-j\frac{2\pi k}{N}\tau_i}
\]
对应自相关矩阵为 \(R_{HH}=E\{HH^H\}=[r_{m,n}]\),\(H=[H_1,H_2,\cdots,H_N]\) ,\(N\) 为FFT点数。信道自相关矩阵中元素值的计算公式为
\[\begin{aligned}
{r_{m,n}} &= E\left\{ {{h_m}h_n^*} \right\}\\
&=E \left\{ {\sum\limits_{i = 0}^{M - 1} {{\alpha _i}{{\rm{e}}^{ - j2\pi \frac{m}{N}{\tau _i}}}} \sum\limits_{k = 0}^{M - 1} {\alpha _k^*{{\rm{e}}^{j2\pi \frac{n}{N}{\tau _k}}}} } \right\}\\
&= E\left\{ {\sum\limits_{i = 0}^{M - 1} {{{\left| {{\alpha _i}} \right|}^2}{{\rm{e}}^{ - j2\pi \frac{{m - n}}{N}{\tau _i}}}} + \sum\limits_{i = 0}^{M - 1} {\sum\limits_{k = 0,k\ne i}^{M - 1} {{\alpha _i}\alpha _k^*{{\rm{e}}^{ - j2\pi \frac{{m{\tau _i} - n{\tau _k}}}{N}}}} } } \right\}\\
&= E\left\{ {\sum\limits_{i = 0}^{M - 1} {{{\left| {{\alpha _i}} \right|}^2}{{\rm{e}}^{ - j2\pi \frac{{m - n}}{N}{\tau _i}}}} } \right\}\\
&= E\left\{ {\sum\limits_{i = 0}^{M - 1} {\theta \left( {{\tau _i}} \right){{\rm{e}}^{ - j2\pi \frac{{m - n}}{N}{\tau _i}}}} } \right\}
\end{aligned}
\]
参考链接

 浙公网安备 33010602011771号
浙公网安备 33010602011771号