最优性条件
非线性规划的最优解所满足的必要条件和充分条件(仅包含定理)
注意:文中很多地方的变量其实是矢量,比如方向 \(d\) 和梯度,为了方便写都没有写粗体。
一、无约束问题的最优性条件
-
定理 7.1.1 (其它定理证明需要的基础定理)
设函数 \(f(x)\) 在点 \(\bar{x}\) 处可微,如果存在方向 \({d}\) ,使得 \(\nabla f(\bar{{x}})^{\mathrm{T}} {d}<0\) ,则存在 \(\delta>0\) ,使得对每个 \(\lambda\in(0,\delta)\),有 \(f(\bar{x}+\lambda d)<f(\bar{x})\).
-
定理 7.1.2 (局部极小点的一阶必要条件)
设函数 \(f(x)\) 在点 \(\bar{x}\) 处二次可微,若点 \(\bar{x}\) 是局部极小点,则梯度 \(\nabla f(\bar{x})={0}\).
-
定理 7.1.3 (局部极小点的二阶必要条件)
设函数 \(f(x)\) 在点 \(\bar{x}\) 处二次可微,若点 \(\bar{x}\) 是局部极小点,则梯度 \(\nabla f(\bar{x})=\boldsymbol{0}\),且 Hesse 矩阵 \(\nabla^{2} f(\bar{x})\) 半正定.
-
定理 7.1.4 局部极小点的二阶充分条件
设函数 \(f(x)\) 在点 \(\bar{x}\) 处二次可微,若梯度 \(\nabla f(\bar{x})={0}\),且 Hesse 矩阵 \(\nabla^{2} f(\bar{x})\) 正定,则 \(\bar{x}\) 是局部极小点.
-
定理 7.1.5 (函数凸性假设下,全局极小点的充要条件)
设函数 \(f(x)\) 是定义在 \(\mathbb{R}^n\) 上的可微凸函数,\(\bar{x}\in\mathbb{R^n}\) ,则 \(\bar{x}\) 是全局极小点的充分必要条件是梯度 \(\nabla f(\bar{x})={0}\).
二、含约束问题的最优性条件
2.1 含约束的极值问题表示
有约束的极值问题
其中,\(g_{i}({x}) \geqslant 0\) 为不等式约束,\(h_{j}({x})=0\) 为等式约束,集合
称为可行域。
2.2 可行方向与下降方向
-
下降方向
设函数 \(f(x)\) 是定义在 \(\mathbb{R}^n\) 上的实函数,\(\bar{x}\in\mathbb{R^n}\) ,\(d\) 是非零向量,若存在数 \(\delta>0\) ,使得对每个 \(\lambda\in(0,\delta)\),都有
\[f(\bar{x}+\lambda d)<f(\bar{x}) \]则称 \(d\) 是函数 \(f(x)\) 在 \(\bar{x}\) 处的下降方向。
如果 \(f(x)\) 是可微函数,且 \(\nabla f(\bar{{x}})^{\mathrm{T}} {d}<0\) ,则根据定理 7.1.1,\(d\) 是函数 \(f(x)\) 在 \(\bar{x}\) 处的下降方向,记作
\[F_{0}=\left\{{d} \mid {\nabla} f(\overline{{x}})^{\mathrm{T}} {d}<0\right\} \] -
可行方向
设集合 \(S \subset \mathbb{R}^{n},\bar{x}\in \mathrm{cl}\;S\),\(d\) 是非零向量,若存在数 \(\delta>0\) ,使得对每个 \(\lambda\in(0,\delta)\),都有
\[\bar{x}+\lambda d \in S \]则称 \(d\) 是集合 \(S\) 在 \(\bar{x}\) 处的可行方向。其中 "cl" 表示闭包。
集合 \(S\) 在在 \(\bar{x}\) 处的可行方向组成的集合
\[D=\{{d} \mid {d} \neq \mathbf{0}, \overline{{x}} \in \mathrm{cl}\; S, \exists \delta>0 \text {, 使得 } \forall \lambda \in(0, \delta) \text {, 有 } \overline{{x}}+\lambda {d} \in S\} \]称为在 \(\bar{x}\) 处的可行方向锥。
-
定理 7.2.1
设 \(S\) 是 \(\mathbb{R}^{n}\) 中的非空集合,\(\bar{x}\in S\), \(f(x)\) 在点 \(\bar{x}\) 处可微,若 \(\bar{x}\) 是局部最优解,则 \(F_{0} \cap D=\varnothing\). 即若 \(\bar{x}\) 是局部最优解,则 \(\bar{x}\) 处的可行方向一定不是下降方向。
2.3 不等式约束问题
非线性规划问题
可行域为
其约束条件在点 \(\bar{x}\in S\) 有两种情形:
-
在点 \(\bar{x}\) 处起作用约束(下标集用 \(I\) 表示)
\[g_{i}(\bar{x})=0, \quad i \in I \] -
在点 \(\bar{x}\) 处不起作用约束
\[g_{i}(\bar{x})>0, \quad i \notin I . \]-
用 \(I\) 表示起作用约束下标集
\[I=\left\{i \mid g_{i}(\bar{{x}})=0\right\} \] -
用 \(G_0\) 替代定理 7.2.1 中的可行方向锥 \(D\)
\[G_{0}=\left\{{d} \mid \nabla{g_{i}}(\bar{{x}})^{\mathrm{T}} {d}>0, i \in I\right\} \]
-
-
定理 7.2.2(由7.2.1变化而来)—— 最优性的几何表示
设 \(\bar{x}\in S\), \(f(x)\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,若 \(\bar{x}\) 是局部最优解,则
\[F_{0} \cap G_0=\varnothing \] -
定理 7.2.3 (Fritz John条件)—— 最优性的代数表示
设 \(\bar{x}\in S\),\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,若 \(\bar{x}\) 是局部最优解,则存在不全为0的非负数 \(w_0,w_i(i\in I)\) ,使得
\[w_{0} \nabla f(\bar{x})-\sum_{i \in I} w_{i} \nabla g_{i}(\bar{x})=0 \]证明需要用到 Gordan 定理,即 如果一组基的非负组合是一个凸锥,则等价为这组基的正组合表示不了原点,除非系数都是0(两个条件只有一个成立)
-
定理 7.2.4 (Kuhn-Tucker 条件)—— K-T条件,在Fritz John条件基础上增加了起约束作用的梯度线性无关的约束规格(对约束条件的限制),以避免出现 \(w_0=0\) 的情形。
设 \(\bar{x}\in S\),\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,\(\left\{\nabla g_{i}(\bar{x}) \mid i \in I\right\}\) 线性无关, 若 \(\bar{x}\) 是局部最优解,则存在非负数 \(w_i(i\in I)\) ,使得
\[\nabla f(\bar{{x}})-\sum_{i \in I} w_{i} \nabla g_{i}(\bar{{x}})=\mathbf{0} \]若 \(g_i(x)(i\notin I)\) 在点 \(\bar{x}\) 处可微,K-T 条件可等价表示为
\[\begin{aligned} &\nabla f(\bar{x})-\sum_{i=1}^{m} w_{i} \nabla g_{i}(\bar{{x}})=\mathbf{0}, \\ &w_{i} g_{i}(\bar{x})=0, \quad i=1, \cdots, m, \\ &w_{i} \geqslant 0, \quad i=1, \cdots, m . \end{aligned} \]其中,\(w_{i} g_{i}(\bar{x})=0\) 称为互补松弛条件。
-
定理 7.2.5 凸优化问题最优解的一阶充分条件
设问题中 \(f\) 是凸函数,\(g_i(i=1,2,\cdots,m)\) 是凹函数(注意不等式约束 \(g_i\) 的符号(若是 \(g_i\le0\) ,则应该是凸函数),\(S\) 是可行域,\(\bar{x}\in S\),\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,K-T 条件成立,则 \(\bar{x}\) 为全局最优解。
2.4 一般约束问题
一般约束问题(含不等式和等式约束)
-
正则点
设 \(\bar{x}\) 为可行点,不等式约束中在 \(\bar{x}\) 起作用约束下标集记作 \(I\) ,如果向量组 \(\left\{\nabla g_{i}(\bar{x}), \nabla h_{j}(\bar{x}) \mid i \in I, j=1,2, \cdots, l\right\}\) 线性无关,就称 \(\bar{x}\) 为约束 \(g(x)\ge 0\) 和 \(h(x)=0\) 的正则点。
-
可行曲线与切平面(为描述等式约束的可行移动引入)
- 定义 7.2.4 点集 \(\left\{x=x(t) \mid t_{0} \leqslant t \leqslant t_{1}\right\}\) 称为超曲面 \(S=\{x|h(x)=0\}\) 上的一条曲线, 若对所有的 \(t\in[t_0,t_1]\) 均有\(h(x)=0\) ,则如果导数 \(x'(t)=\frac{\mathrm dx(t)}{\mathrm dt}\) 存在,则称曲线是可微的,该一阶导数是曲线在点 \(x(t)\) 处的切向量,曲面 \(S\) 在点 \(x\) 处所有可微切向量组成的集合,称为曲面 \(S\) 在点 \(x\) 的切平面,记作 \(T(x)\)。
-
等式约束的几何表示
设 \(\bar{x}\) 为曲面 \(S=\{x|h(x)=0\}\) 上一个正则点,则在点 \(\bar{x}\) 切平面 \(T(\bar{x})\) 等于子空间 \(H=\left\{d \mid \nabla h(\bar{x})^{\top} d=0\right\}\).
-
定理 7.2.7 一般约束问题最优解的一阶必要条件 —— 几何表示
设 \(\bar{x}\) 为可行点,\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,\(h_j(j=1,2,\cdots,l)\) 在点 \(\bar{x}\) 连续可微,\(\nabla h_j(\bar{x})(j=1,2,\cdots,l)\) 线性无关, 若 \(\bar{x}\) 是局部最优解,则在 \(\bar{x}\) 处,有
\[F_{0} \cap G_{0} \cap H_{0}=\varnothing \]其中,\(F_{0},G_{0},H_{0}\) 的定义为
\[\begin{aligned} &F_{0}=\left\{{d} \mid \nabla f(\bar{x})^{\mathrm{T}} d<0\right\}, \\ &G_{0}=\left\{{d} \mid \nabla g_{i}(\bar{x})^{\mathrm{T}} {d}>0, i \in I\right\} \\ &H_{0}=\left\{{d} \mid \nabla h_{j}(\bar{x})^{\mathrm{T}} d=0, j=1,2, \cdots, l\right\}. \end{aligned} \] -
定理 7.2.8 (Fritz John条件) —— 代数表示
设 \(\bar{x}\) 为可行点,\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,\(h_j(j=1,2,\cdots,l)\) 在点 \(\bar{x}\) 连续可微,若 \(\bar{x}\) 是局部最优解,则存在不全为零的数 \(w_0,w_i(j\in I)\) 和 \(v_j(j=1,2,\cdots,l)\) ,使得
\[w_{0} \nabla f(\bar{x})-\sum_{i \in I} w_{i} \nabla g_{i}(\bar{x})-\sum_{j=1}^{i} v_{j} \nabla h_{j}(\bar{x})=\mathbf{0}, \quad w_{0}, w_{i} \geqslant 0, \quad i \in I . \] -
定理 7.2.9 (Kuhn-Tucker 条件)—— K-T条件,在Fritz John条件基础上增加了起约束作用的梯度线性无关的约束规格(对约束条件的限制),以避免出现 \(w_0=0\) 的情形。
设 \(\bar{x}\) 为可行点,\(I=\{i|g_i(\bar{x})=0\}\), \(f,g_i\in I\) 在点 \(\bar{x}\) 处可微,\(g_i(x)(i\notin I)\) 在 \(\bar{x}\) 连续,\(h_j(j=1,2,\cdots,l)\) 在点 \(\bar{x}\) 连续可微,向量集
\[\left\{\nabla g_{i}(\bar{x}), \nabla h_{j}(\bar{x}) \mid i \in I, j=1, \cdots, l\right\} \]线性无关,若 \(\bar{x}\) 是局部最优解,则存在数 \(w_i(j\in I)\) 和 \(v_j(j=1,2,\cdots,l)\) ,使得
\[\nabla f(\bar{x})-\sum_{i \in I} w_{i} \nabla g_{i}(\bar{x})-\sum_{j=1}^{i} v_{j} \nabla h_{j}(\bar{x})=\mathbf{0}, \quad w_{i} \geqslant 0, \quad i \in I . \]若 \(g_i(x)(i\notin I)\) 在点 \(\bar{x}\) 处可微,K-T 条件可等价表示为
\[\begin{aligned} &\nabla f(\bar{x})-\sum_{i=1}^{m} w_{i} \nabla g_{i}(\bar{x})-\sum_{j=1}^{t} v_{j} \nabla h_{j}(\bar{{x}})=\mathbf{0} \\ &w_{i} g_{i}(\bar{x})=0, \quad i=1, \cdots, m \\ &w_{i} \geqslant 0, \quad i=1, \cdots, m, \end{aligned} \] -
广义 Lagrange 函数
\[L({x}, {w}, {v})=f({x})-\sum_{i=1}^{m} w_{i} g_{i}({x})-\sum_{j=1}^{l} v_{j} h_{j}({x}) \]若 \(\bar{x}\) 是局部最优解,则存在 Lagrange 乘子 \(\bar{w}\ge 0\) 和 \(v\) ,使得
\[\nabla_{x} L(\bar{x}, \bar{w}, \bar{v})=0 \]此时一般约束问题的一阶必要条件可表示为
\[\begin{aligned} &\nabla_{x} L({x}, {w}, {v})=\mathbf{0}, \\ &g_{i}({x}) \geqslant 0, \quad i=1, \cdots, m, \\ &h_{j}({x})=0, \quad j=1, \cdots, l, \\ &w_{i} g_{i}({x})=0, \quad i=1, \cdots, m, \\ &w_{i} \geqslant 0, \quad i=1, \cdots, m . \end{aligned} \] -
定理 7.2.10 凸优化问题最优解的充分条件
设问题中 \(f\) 是凸函数,\(g_i(i=1,2,\cdots,m)\) 是凹函数(注意不等式约束 \(g_i\) 的符号(若是 \(g_i\le0\) ,则应该是凸函数)\(h_j(j=1,2,\cdots,l)\) 是线性函数,\(S\) 是可行域,\(\bar{x}\in S\),\(I=\{i|g_i(\bar{x})=0\}\),且在 \(\bar{x}\) 处 K-T 条件成立,即存在 \(w_i\ge 0(i\in I)\) 及 \(v_j(j=1,2,\cdots,l)\) ,使得
\[\nabla f(\bar{x})-\sum_{i \in I} w_{i} \nabla g_{i}(\bar{x})-\sum_{j=1}^{i} v_{j} \nabla h_{j}(\bar{x})=\mathbf{0}, \quad w_{i} \geqslant 0, \quad i \in I . \]则 \(\bar{x}\) 为全局最优解。
注:此处关于函数凸性的假设还可以适当放宽,涉及到准凸和伪凸的概念。
-
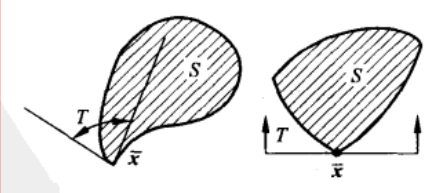
切锥
设 \(S\) 是 \(\mathbb{R}^{”}\) 中一个非空集合, 点 \(\overline{\boldsymbol{x}} \in \mathrm{cl} S\), 集合 \(T=\left\{\boldsymbol{d} \mid\right.\) 存在 \({x}^{(k)} \in S, {x}^{(k)} \rightarrow \bar{{x}}\) 及 \(\lambda_{k}>0\), 使得 \(\left.{d}=\lim _{k \rightarrow \infty} \lambda_{k}\left({x}^{(k)}-\bar{{x}}\right)\right\}\), 则称 \({T}\) 为集合 \(S\) 在点 \(\bar{{x}}\) 的切锥.
![]()
-
定理 7.2.11 (二阶必要条件)
设 \(\bar{x}\) 是局部最优解,\(f,g_i,h_j\) 二次连续可微,并存在满足一阶必要条件的乘子 \(\bar{w}\) 和 \(\bar{v}\) ,再假设在点 \(\bar{x}\) 约束规格 \(\bar{G}=\bar{T}\) 成立,则对每一个向量 \(d\in G\),都有
\[d^{\mathrm{T}} {\nabla}_{x}^{2} L(\bar{x}, \bar{w}, \bar{v}) {d} \geqslant 0 \]其中,
\[\nabla_{x_{x}^{2}}^{2} L(\bar{x}, \bar{w}, \bar{v})=\nabla^{2} f(\bar{x})-\sum_{i=1}^{m} \bar{w}_{i} \nabla^{2} g_{i}(\bar{x})-\sum_{j=1}^{1} \bar{v}_{j} \nabla^{2} h_{j}(\bar{{x}}) \]是 Lagrange 函数 \(L(x,w,v)\) 在 \(\bar{x}\) 关于 \(x\) 的 Hesse 矩阵。
集合 \(\bar G\) 为
\[\bar{G}=\left\{d\left | \begin{array}{ll} {d} \in \mathbb{R}^{n} \\ \nabla g_{i}(\bar{x})^{\mathrm{T}} {d}=0, & i \in I \text { 且 } \bar{w}_{i}>0 \\ \nabla g_{i}(\bar{x})^{\mathrm{T}} {d} \geqslant 0, & i \in I \text { 且 } \bar{w}_{i}=0 \\ \nabla h_{j}(\bar{x})^{\mathrm{T}} {d}=0, & j=1, \cdots, l \end{array}\right\}\right. \] -
定理 7.2.12 (二阶充分条件)
设 \(f,g_i,h_j\) 二次连续可微, \(\bar{x}\) 是可行点,并存在乘子 \(\bar{w}\) 和 \(\bar{v}\) 满足一阶必要条件,且对每一个向量 \(d\in G\),都有
\[d^{\mathrm{T}} {\nabla}_{x}^{2} L(\bar{x}, \bar{w}, \bar{v}) {d}>0 \]则 \(\bar{x}\) 是严格局部最优解。
其中,集合 \(G\) 为
\[\bar{G}=\left\{d\left | \begin{array}{ll} d\ne 0\\ \nabla g_{i}(\bar{x})^{\mathrm{T}} {d}=0, & i \in I \text { 且 } \bar{w}_{i}>0 \\ \nabla g_{i}(\bar{x})^{\mathrm{T}} {d} \geqslant 0, & i \in I \text { 且 } \bar{w}_{i}=0 \\ \nabla h_{j}(\bar{x})^{\mathrm{T}} {d}=0, & j=1, \cdots, l \end{array}\right\}\right. \]- 注意:对于含等式约束优化问题的二阶极值条件,不能仅考虑 Hesse 矩阵,即便 Hesse 矩阵正定,也不一定是局部最优解。
参考链接
- 《最优化理论与算法》(第7章 最优性条件) 陈宝林著

 浙公网安备 33010602011771号
浙公网安备 33010602011771号