ROS编译工作区缺少cv_bridge的问题解决
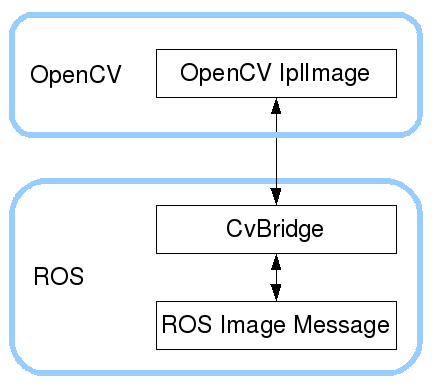
cv_bridge是OpenCV与ROS之间的格式转换桥梁,编译工作区时遇到报错(目标不存在),直接将cv_bridge包复制到指定的目录即可。
下载地址:https://github.com/ros-perception/vision_opencv
(这个仓库中包含多个包,下载之后只需要把cv_bridge拷贝到指定目录即可)

cv_bridge是OpenCV与ROS之间的格式转换桥梁,编译工作区时遇到报错(目标不存在),直接将cv_bridge包复制到指定的目录即可。
下载地址:https://github.com/ros-perception/vision_opencv
(这个仓库中包含多个包,下载之后只需要把cv_bridge拷贝到指定目录即可)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号