1. 线性二自由度汽车质心绝对加速度在车辆坐标系下的公式
在汽车线性二自由度微分方程那篇博客中,我具体推导了ay,但是用了近似和忽略。下面将用向量的方法,详细推导出ax、ay。
下面是推导的过程:
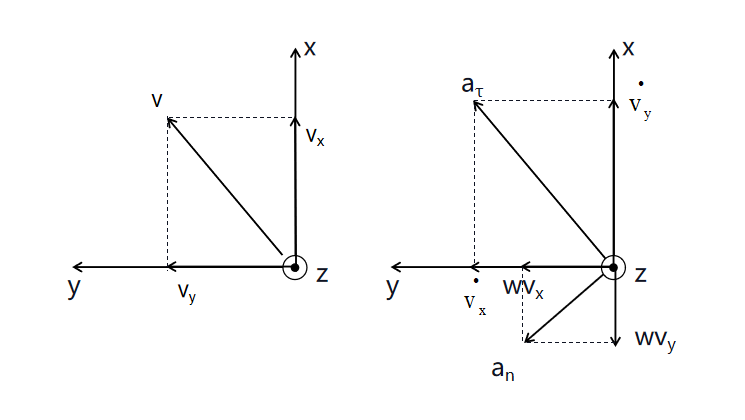
a=aτ+an=⋅vx→x+⋅vy→y+w→z×(vx→x+vy→y)=⋅vx→x+⋅vy→y+wvx→z×→x+wvy→z×→y=⋅vx→x+⋅vy→y+wvx→y−wvy→x=(⋅vx−wvy)→x+(⋅vy+wvx)→y=ax→x+ay→y
其中τ向就是切向,而n向就是法向。
2. 一个汽车跟踪问题的滑模控制实例
例:汽车队列跟踪问题可以抽象出如下的模型:⋅⋅x=−⋅x 2+u, 设计控制律u,使x→xd(t→∞)
解:设ϵ=x−xd,则⋅ϵ=⋅x−⋅xd,⋅⋅ϵ=⋅⋅x−⋅⋅xd
可以设计切换函数S(ϵ)=kϵ+⋅ϵ(k>0)
接下来可以证明切换函数的滑模稳定性、存在性、可达性。
2.1 滑模稳定性
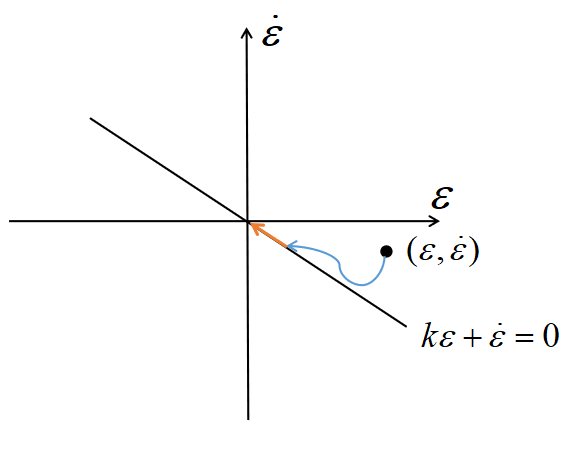
滑模稳定性是指S→0时,ϵ→0且⋅ϵ→0,即点(ϵ,⋅ϵ)会沿着滑模面kϵ+⋅ϵ=0到达原点。如下图中的黄线所示。
可以很快证明滑模稳定性,根据kϵ+⋅ϵ=0,可以解得ϵ=ce−kt,⋅ϵ=−cke−kt
当t→∞时,可知ϵ→0,⋅ϵ→0,滑模存在稳定性。
2.2 滑模存在性与可达性
滑模控制系统存在性的充分条件是 limS→0S⋅S<0,该条件可以保证系统在滑模面附近的任意初始状态,都能到达滑模面,是局部到达的条件。
滑模控制系统可达性的充分条件是 S⋅S<0,该条件可以保证系统在状态空间的任意位置,都能到达滑模面,是全局可达条件。
上面两个要素都是指如何到达滑模面的事情,如上图的蓝线所示。
接下来证明滑模可达性(也就证明了存在性)。
可以采用等速趋近律⋅S=−λsgn(s)(λ>0),在该趋近律下,S⋅S<0成立。因为S>0时,⋅S<0;S<0时,⋅S>0。
将切换函数S(ϵ)=kϵ+⋅ϵ左右两边求导,得到
⋅S=k⋅ϵ+⋅⋅ϵ
再将⋅⋅ϵ=⋅⋅x−⋅⋅xd带入上式,得到
⋅S=k⋅ϵ+⋅⋅x−⋅⋅xd
得到的⋅⋅x与控制律u存在关系⋅⋅x=−⋅x 2+u,所以将它代入上式就引入了控制律。
⋅S=k⋅ϵ−⋅⋅xd−⋅x 2+u
将上式与等速趋近律联立消去⋅S,得到
u=−λsgn(s)−k⋅ϵ+⋅⋅xd+⋅x 2
u可以看成uequ和uN两部分:




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步