

数学知识:Convex Optimization A
- 1. Introduction
- 2. Convex sets
- affine set
- convex set
- convex combination and convex hull
- convex cone
- hyperplane and half-sapces
- euclidean balls and ellipsoids
- norm balls and cones
- polyhedra
- positive semidefinite cone
- operations that preserve convexity
- intersection
- affine function
- perspective and linear-fractional function
- generalized inequalities
- minimum and minimal elements
- separating hyperplane thoerem
- supporting hyperplane theorem
- dual cones and generalized inequalities
- minimum and minimal elements via dual inequality
- Convex functions
- definition
- examples on
- example on and
- restriction of a convex function to a line
- extended-value extension
- first-order condition
- second-order condition
- examples
- epigraph and sublevel set
- Jense's inequality
- operations that preserve convexity
- positive weighted sum & composition with affine function
- pointwise maximum
- pointwise supremum
- composition with scalar functions
- vector composition
- minimization
- perspective
- the conjugate function
- quasiconvex functions
- examples
- properties
- log-concave and log-convex functions
- properties of log-concave functions
- consequences of integration property
- convexity with respect to generalized inequalities
1. Introduction
- mathematical optimization
- least-squares and linear programing
- convex optimization
- example
- course goals and topics
- nonlinear optimization
- brief history of convex optimization
mathmetical optimization
optimization problem
- : optization variables
- : objective function
- : constraint functions
optimal solution has smallest value of among all vectors that satisfy the constraints
examples
portfolio optimization
- variables:amounts inveated in different assets
- constraints:budget,max./min. investment per asset, minimum return
- objective:overall risk or return variance
device sizing in eletronic circuits
- variables: device widths and lengths
- constraints: manufacturing limits, timing requirements, maximum area
- objective: power consumption
data fiting
- variables: model parameters
- constraints: prior information, parameter limits
- objective: measure of misfit or prediction error
solving optimization problems
general optimization problem
- very difficult to solve
- methods involve some compromise, e.g., very long computation time or not always finding the solution
examples: certain problem classes can be solved efficiently and reliably
- least-squares problems
- linaer programming problems
- convex optimization problems
least-squares
solving least-square problems
- analytical solution:
- reliabe and efficient algorithems and software
- computation time proportional to ; less if structured
- a mature technology
using least-squares
- least-squares problems are easy to recognize
- a few standard techniques increase flexibility(e.g., including weights, adding regularization terms)
linear programming problem
solving linear programs
- no analytical formula for solution
- reliable and efficient algorithms and software
- computation time proportional to if ; less with structure
- a mature technology
using linaer programming
- not as easy as least-square problems
- a few standard tricks used to convert problems to linear programs(e.g., problems involving or norms, piecewise-linear functions)
convex optimization problem
- objective and constraint are convex:
if
- includes least-square problems and linaer program problems as special cases
solving convex optimization problem
- no analytic solution
- reliable and efficient algorithms
- consumption time proportional to , where is cost of evaluating 's and their first and second derivatives
- almost a technology
using convex optimization
- often difficult to recognize
- many triks for transforming problems into convex form
- surprisingly many problems can be solved via convex optimization
example
lamps illuminating (small, flat) patches
intensity at patch depends linearly on lamp power :
problem: achieve desired illumination with bounded lamp powers
solution
- use uniform power: , vary
- use least-squares:
round if or
- use weighted least-squares:
iteratively adjust weights until
- use linear programming:
which can be solved via linear programming
- use convex optimization: problem is equivalent to
with
is convex because maximum of convex functions is convex
additional constraints:
Does add 1 or 2 below complecate the problem?
- no more than 50% total power is in 10 lamps
- no more than half of lamps are on ()
- answer: whit (1), still easy to solve; whit (2), extremely difficult
- moral: (untrained) intuition doesn't always work; whitout the proper background very easy problems can appear quite similiar to very difficult
course goals and topics
goals
- recognize/formulate problems (such as illumination problem) as convex optimization problems
- develop code for problems of moderate size (1000 lamps, 5000 patchs)
- characterize optimal solutin (optimal power distribution), give limits of performace, etc.
topics
- convex sets, functions, optimization problems
- examples and applications
- algorithms
nonlinear optimization
...
2. Convex sets
- affine and convex sets
- some important example
- operations that preserve convexity
- genaralized inequalities
- separating and supporting hyperplanes
- dual cones and generalied inequalized
affine set
line through : all points
affine set: contains the line through any two distinct points in the set
example: soultion set of linear equation
(conversely, every affine set can be expressed as solution set of system of linear equations)
convex set
line segment between and : all points
with
convex set: contains any line segment between two points in the set
examples:
略
convex combination and convex hull
convex combination of : any point of the form
with
convex hull conv :set of all convex combination of points in
convex cone
conic (nonnegative) combination of and : any point of the form
with
convex cone: set that contains all conic combinations of points in the set
hyperplane and half-sapces
hyperplane: set of the form
halfspace: set of the form
- is the normal vector
- hyperplanes are affine and convex; halfspaces are convex
euclidean balls and ellipsoids
(euclipsoid) ball with center and radius :
ellipsoid: set of the form
with ( symmetic positive definite matrix)
other representation: with suqare and nonsigular
norm balls and cones
norm: a function that satisfis
- if and only if
- for
notation: is general (unspecified) norm; is particular norm
norm ball with center and radius
norm cone:
euclidean norm cone is called second-order cone;
norm balls and cones are convex
polyhedra
solution set of finitely many linear inequalities and equalities
( is componentwise inequality)
polyhedron is intersection of finite number of halfspaces and hyperplanes
positive semidefinite cone
notation:
- is set of symmetric matrices
- positive semidefinite matices
is a convex cone
- positive definite matrices
example:
operations that preserve convexity
practical methods to establishing convexity of a set
- apply definition
- show that is obtained from simple convex sets (hyperplanes, halfspaces, norm balls, ...) by operations that preserve convexity
- intersection
- affine function
- perspective function
- linear-fractional function
intersection
the intersection of (any number of) convex sets is convex
example:
where
affine function
suppose is affine ()
- the image of a convex set under is convex
- the inverse image of a convex set under is convex
example:
- scaling, translationg, projection
- solution set of linear matrix inequality (with )
- hyperbolic cone (with )
perspective and linear-fractional function
perspective function :
images and inverse images of convex sets under perspective are convex
linear-fractional function :
images and inverse images of convex sets under linear-fractional functions are convex
example of a linear-fractional function
generalized inequalities
a convex cone is a proper cone if
- is closed (contains its boundary)
- is solid (has nonempty interior)
- is pointed (contains no line)
examples
- nonnegtive orthant
- positive semidefinite cone
- nonnegtive polynomials on :
generalized inequality defined by a proper cone :
examples
- componentwise inequality ()
- martrix ineqaulity ()
these two types are so common that we drop the subscript in
properties: many properties of are much similar to on , ,
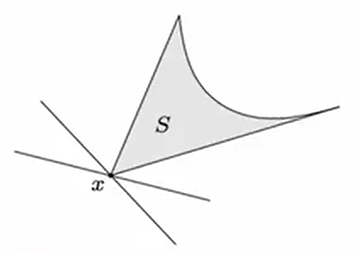
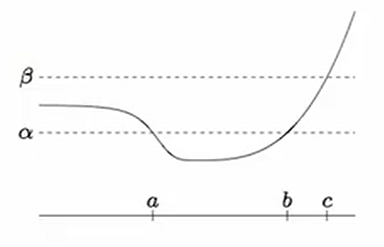
minimum and minimal elements
is not in general a linear ordering: we can have and
is the minimum element of with respect to if
is a minimal element of with respect of if
example ()
is the minimum element of
is a minimal elementof
separating hyperplane thoerem
if and are disjoint convex sets, then there exists such that
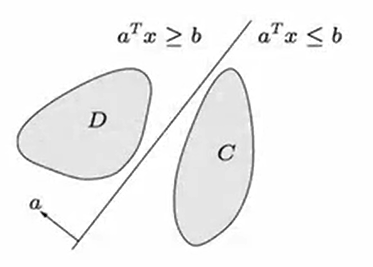
the hyperplane separates and
strict separation requires additional assuptions (, is closed, is a singleton)
supporting hyperplane theorem
supporting hyperplane to set at boundary point :
where and for all
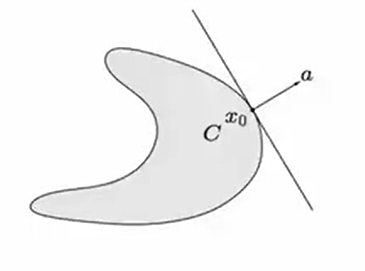
supporting hyperplane theorem: if is convex, then there exists a supporting hyperplane at every boundary point of
dual cones and generalized inequalities
dual cone of a cone :
examples
first three examples are self-dual cones
dual cones of paper cones are proper, hence define generalized inequalities:
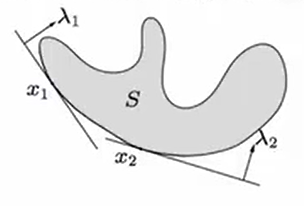
minimum and minimal elements via dual inequality
minimum element w.r.t.
is minimum element of if for all , is the unique minimizer of over
minimal element w.r.t.
- if minimizes over for some , then is minimal
- if is a minimal element of a convex set , then there exists a nonzero such that minimizes over
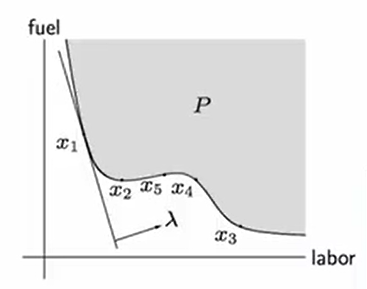
optimal production frontier
- different production methods use different amounts of resources
- production set : resource vectors for all possibel production methods
- efficient (Pareto optimal) methods correspond to resource vectors that are minimal w.r.t.
example ()
are efficient; are not
Convex functions
- basic properties and examples
- oerations that preserve convexity
- the conjugation function
- quasiconvex functions
- log-concave and log-convex functions
- convexity with respect to generalized inequality
definition
is convex if dom is a convex set and
for all dom

- is concave if is convex
- is strictly convex if dom is convex and
for dom
examples on
convex:
- affine: on , for any
- exponential: , for any
- powers: on , for or
- powers of absolute value: on , for
- negative entropy: on
concave:
- affine: on , for any
- powers: on , for
- logarithm: on
example on and
affine functions are convex; all norms are convex
example on
- affine function
- norms: for
example on ( matrices) - affine function
- spectral (maximum singular value) norm
restriction of a convex function to a line
is convexif and only if the function ,
is convex (int ) for any
can check convexity of F by checking convexity of functions of one variable
example: with
where are the eigenvalues of
is concave in (for any choice of ); hence is concave
extended-value extension
(extended value extension: 拓展值延伸)
extended-value extension of is
often simplifies notation; for example, the condition
(as an inequality in ), means the same as the two conditions
- is convex
- for ,
first-order condition
is differentiable if dom f is open and the gradient
exists at each
1st-order condition: differentiable with convex domain is convex if

first-order approximation of is global underestimator
second-order condition
is twice differentiable if dom f is open and the Hessian ,
exists at each
2nd-order conditions: for twice differentiable with convex domain
- is convex if and only if
- if for all , then is strictly convex
examples
quadratic function: (with )
convex if
least-suqares objective:
convex (for any A)
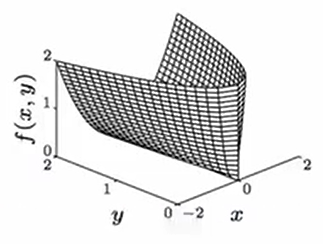
quadratic-over-linear:
convex for
log-sum-exp is convex
to show , we must werify that for all :
since () (from Cauchy-Schwarz inequality)
geometric mean: on is concave (similar proof as for log-sum-exp)
epigraph and sublevel set
(epigraph:上境图;sublevel set:下水平集)
-sublevel set of :
sublevel sets of convex functions are convex (converse is false)
epigraph of :
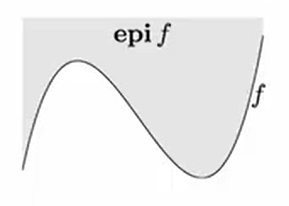
is convex if and only if is a convex set
Jense's inequality
basic inequality: if is convex, then for ,
extension: if is convex, then
for any random variable
basic inequality is special case with discrete distribution
operations that preserve convexity
practical methods for establishing convexity of a function
- verify definition (often simplified restricting to a line<1>)
- for twice differentiable function, show
- show that is obtainted form simple convex functions by operation that preserve convexity
- nonnegative weighted sum
- composition with affine function
- pointwise maximum or supremum
- composition
- minimization
- perspective
<1>: Generally we know that a function is convex it is convex even after we restrict it to a line. "Restricting a function to a line" simply means that you draw a line in the domain of that function and evaluate the function along that line.
positive weighted sum & composition with affine function
nonnegative multipe: is convex if is convex,
sum: convex if convex (extends to infinite sums and integrals)
composition with affine function: is convex if is convex
examples:
- log barrier for linear inequalities
- (any) norm of affine function:
pointwise maximum
if is convex, then is convex
examples
- piecewisw-linear function:
- sum of largest components of :
is convex ( is th largest component of )
proof:
pointwise supremum
(supremum:上界)
if is convex in for each , then
is convex
examples
-
support function of a set is convex
-
distance to farthest point in a set :
- maximun eigenvalue of symmetric matrix: for ,
composition with scalar functions
composition of and :
is convex if:
convex, convex, nondecreasing;
convave, convex, nonincreasing
- proof (for , differentiable )
- note: monotonicity must hold for extended-value extension
examples
- is convex if is convex
- is convex if is concave and positive
vector composition
composition of and :
is convex if
convex, convex, nondecreasing in each argument
concave, convex, nonincreasing in each argument
proof (for , differentiable )
examples
- is concave if are concave and positive
- is convex if is covex
minimization
(infimum: 下界;Schur complement(舒尔补):https://blog.csdn.net/sheagu/article/details/115771184)
if is convex in and is a convex set, then
is convex
examples
- with
minimizing over gives is convex, hence Schur complement
-distance to a set: is convex if is convex
perspective
the perspective of a function is the function ,??有问题!
is convex if is convex
examples
- is convex; hence is convex for
- negative logrithm is convex; hence relative entropy is convex on
- if is convex, then
is convex on
the conjugate function
the conjugate of a function is
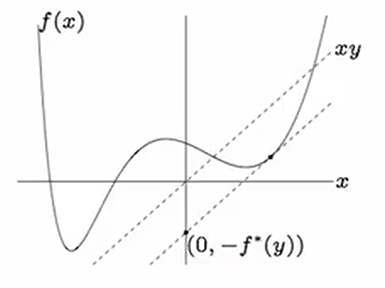
- is convex (even if is not)
- will be useful in chapter 5
examples
- negative logarithm
- strictly convex quadratic with
quasiconvex functions
is quasiconvex if is convex and the sublevel sets
are convex for all
- is quasiconcave if is quasiconvex
- is quasilinear if it is quasiconvex and quasiconcave
注:拟凸
examples
- is convex on
- ceil is quasilinear
- is quasilinear on
- is quasicave on
- linear-fractional function
is quasilinaer
- distance ratio
is quasiconvex
注:距离比
internal rate of return
略
注:内部收益率
properties
modified Jeson inequality: for quasiconvex
first-order condition: differentiable with convex domain is quasiconvex if

sums of quasiconvex functions are not necessarily quasiconvex
log-concave and log-convex functions
a positive function is log-concave if is concave:
is log-covex if
- powers: on is log-convex for ,log-convave for
- many common probability densities are log-concave, , normal:
上式表示什么????
- cumulative Gaussian distribution function is log-cocave
properties of log-concave functions
- twice differentiable with convex domain is log-concave if and only if
for all
- product of log-concave functions is log-concave
- sum of log-concave is not always log-concave
- integration:if is log-concave, then
is log-concave (not easy to show)
consequences of integration property
- convolution of log-concave functions is log-concave
- if concex and is a random variable with log-concave pdf then
is log-concave
proof: write as integral of product of log-concave functions
is pdf of
注:pdf(probability density function)概率密度函数;prob() 求概率运算?
example: yield function
- : nominal parameter vlues for product
- : random variations of parameters in manufactured peoduct
- : set of acceptable values
if is convex and has a log-concave pdf, then
- Y is log-concave
- yield regions
convexity with respect to generalized inequalities
is -convex if is convex and
for
example , is -convex
proof: for fixed , is convex in , ,
for ,
therefore
本文来自博客园,作者:工大鸣猪,转载请注明原文链接:https://www.cnblogs.com/hit-ztx/p/17904123.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· AI与.NET技术实操系列(五):向量存储与相似性搜索在 .NET 中的实现
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)