

基于ZYNQ的DVS/Event-based Camera项目
一、项目简介
本项目以zynq100为主体,使用索尼IMX646(1280×720)Event-based光传感器芯片,事件相机,也叫动态视觉相机。项目从设计芯片外围电路到使用FPGA采集数据,再到用以太网传输数据,最后到对数据处理可视化,已初步完成了整个架构设计与实现。
二、项目架构
以数据流向展示整体架构,具体细节不作赘述:
Chip上的RAW数据经过MIPI接口写入PL端FIFO,ARM核通过DMA读取数据并经以太网口将数据传输到上位机上,在上位机上对采集的数据进行解析和可视化。芯片通过PS端IIC进行配置。
三、项目展示
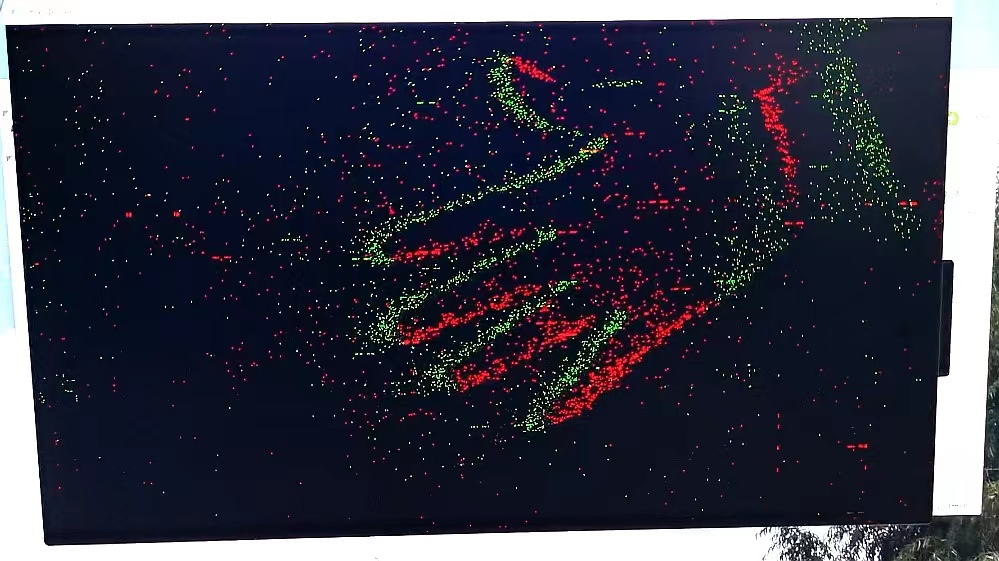
1、图片
2、视频
压缩文件包含三个简单演示视频,涉及手部动作、手环、条纹、笔、盒子、文字等元素(视频压缩较多,建议小尺寸播放)。
https://files.cnblogs.com/files/blogs/683126/相机演示视频.zip?t=1698674915&download=true
四、不足与展望
1、根据芯片原理可知外界光源闪烁会导致噪点,本项目并未配置光源同步,也没有做图像处理,图像噪点较多。
2、一方面,DVS相机具有超低延时和高动态范围等优点,可以弥补传统视觉相机的不足,为业界带来新的解决方案;另一方面,针对DVS相机的图像处理算法算法也给学术界带来新的研究方向。最后,我很期待DVS相机在准确识别、高速追踪和快速决策等方面的应用。
本文来自博客园,作者:工大鸣猪,转载请注明原文链接:https://www.cnblogs.com/hit-ztx/p/17798763.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!