


《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统
1.《机器人SLAM导航核心技术与实战》前言2.《机器人SLAM导航核心技术与实战》先导课:课程大纲3.《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统4.《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点5.《机器人SLAM导航核心技术与实战》第1季:第0章_SLAM发展综述6.《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识7.《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式8.《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理9.《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器10.《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机11.《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘12.《机器人SLAM导航核心技术与实战》第1季:第7章_SLAM中的数学基础
13.《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统
14.《机器人SLAM导航核心技术与实战》第1季:第9章_视觉SLAM系统15.《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统
视频讲解
第1季:第8章_激光SLAM系统
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
添加图片注释,不超过 140 字(可选)
本书内容安排

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
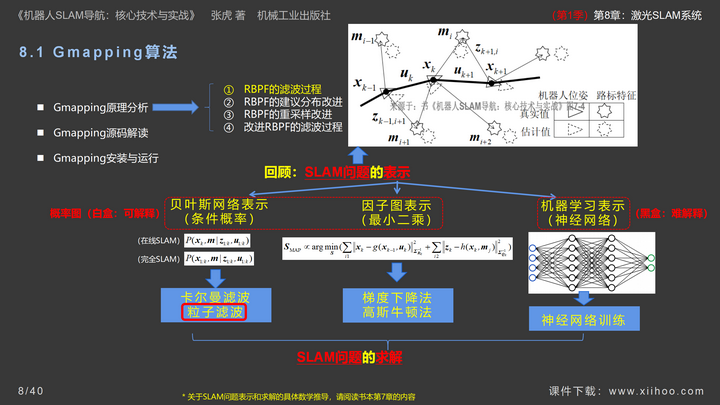
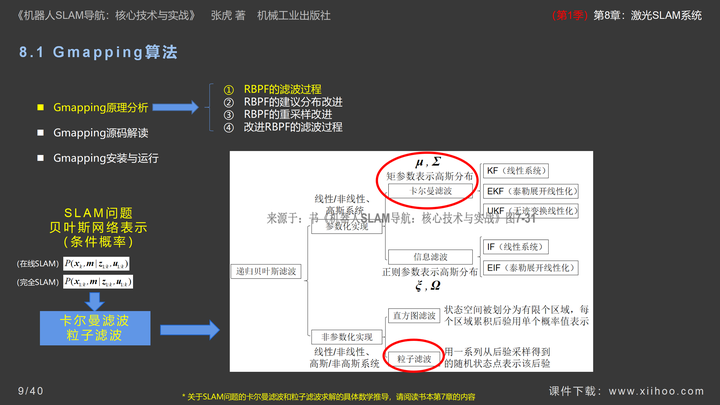
8.1 Gmapping算法
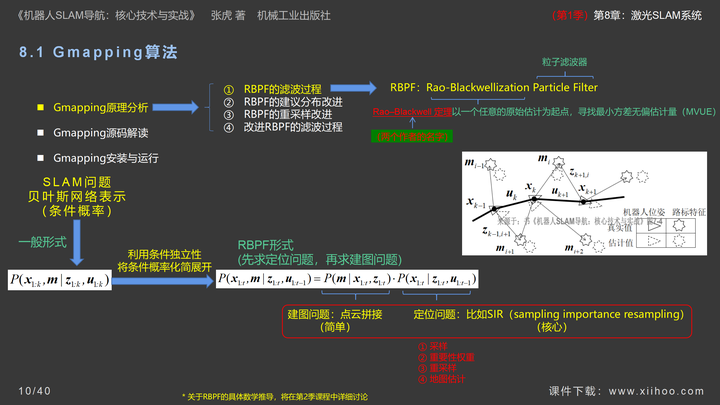
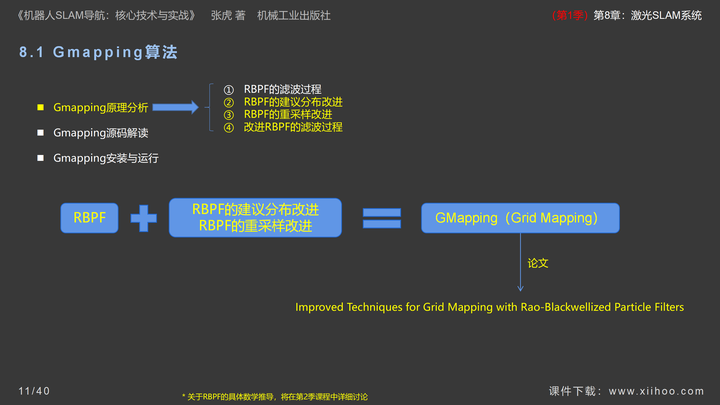
①Gmapping原理分析
RBPF的滤波过程、RBPF的建议分布改进、RBPF的重采样改进、改进RBPF的滤波过程
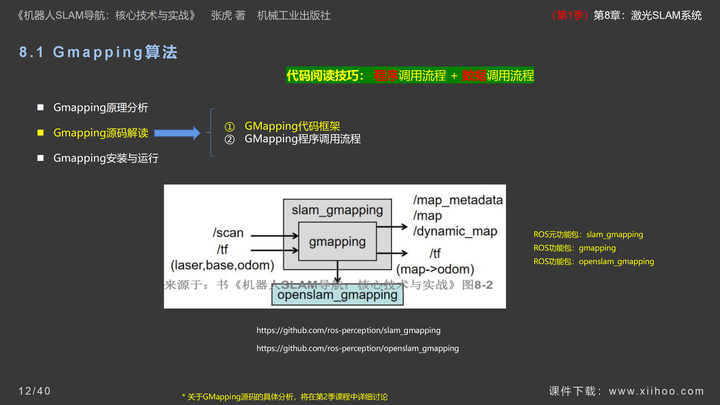
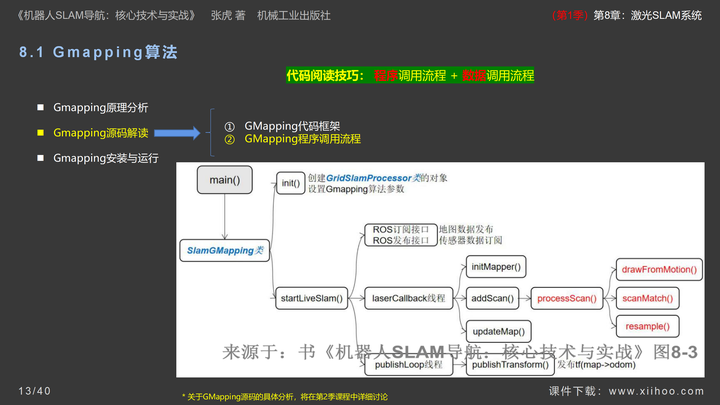
②Gmapping源码解读
GMapping代码框架、GMapping程序调用流程
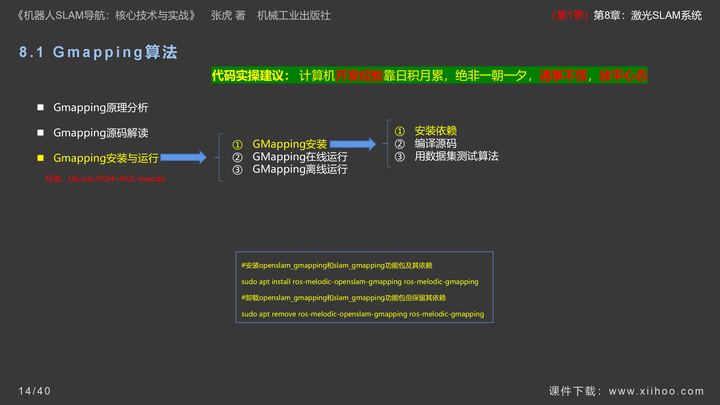
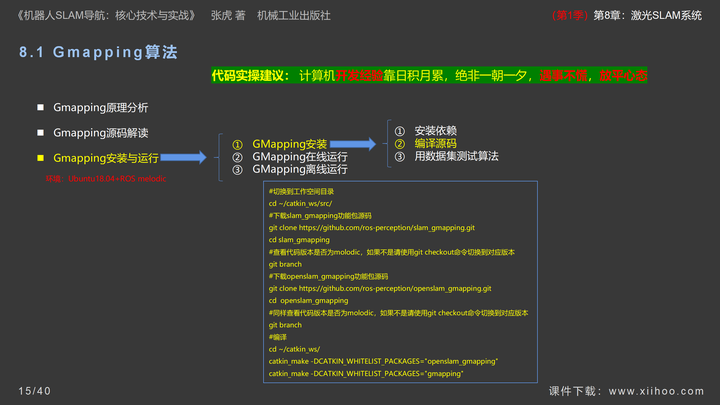
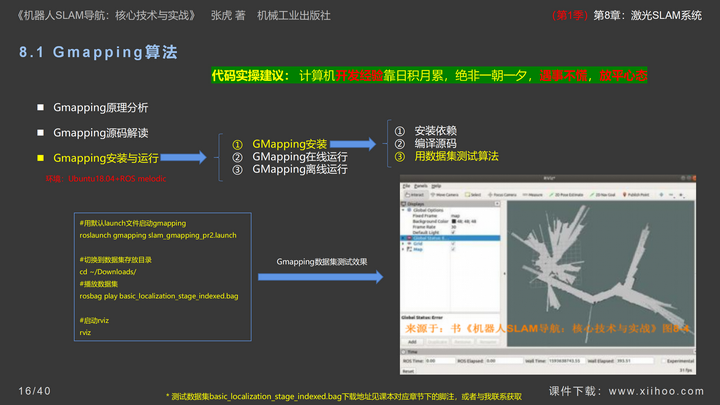
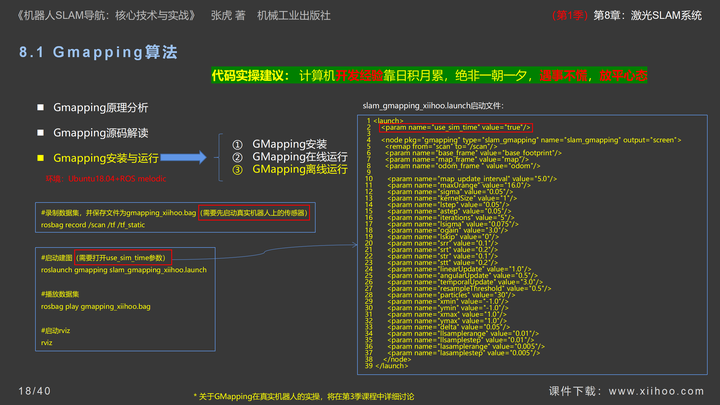
③Gmapping安装与运行
GMapping安装、GMapping在线运行、GMapping离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
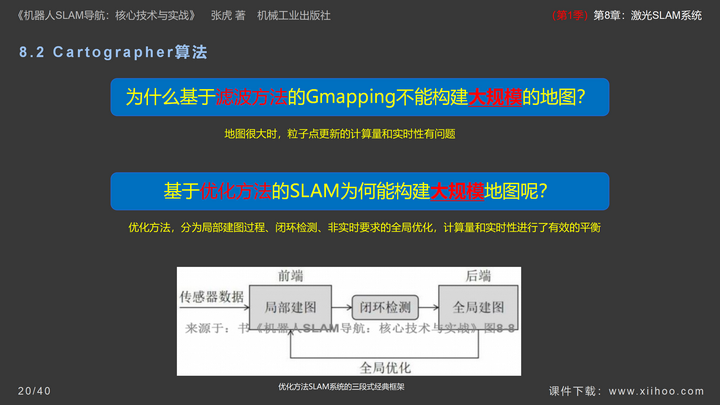
8.2 Cartographer算法
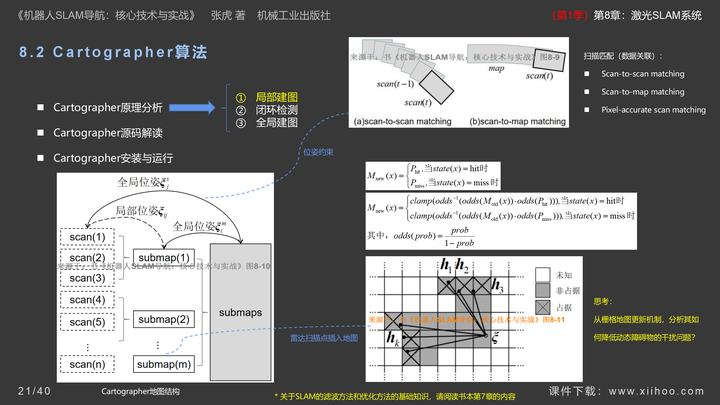
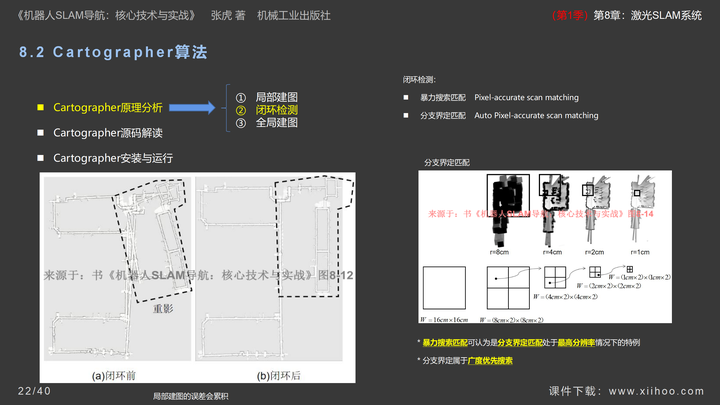
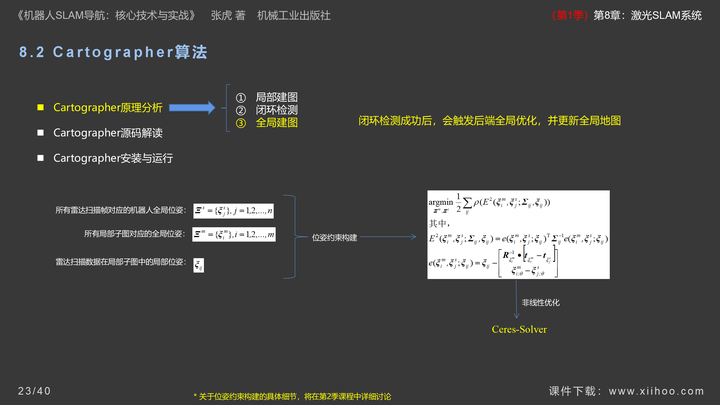
①Cartographer原理分析
局部建图、闭环检测、全局建图
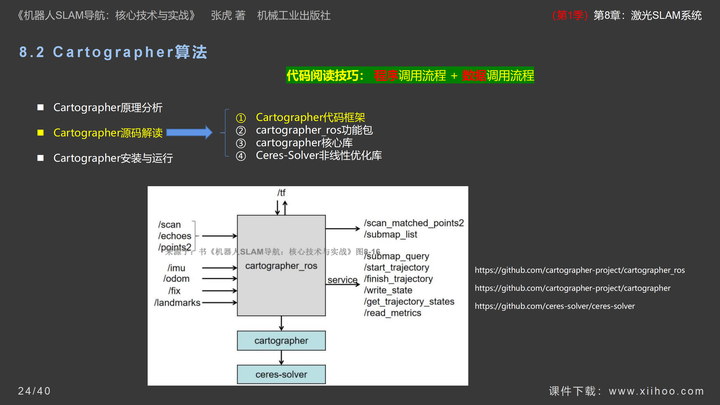
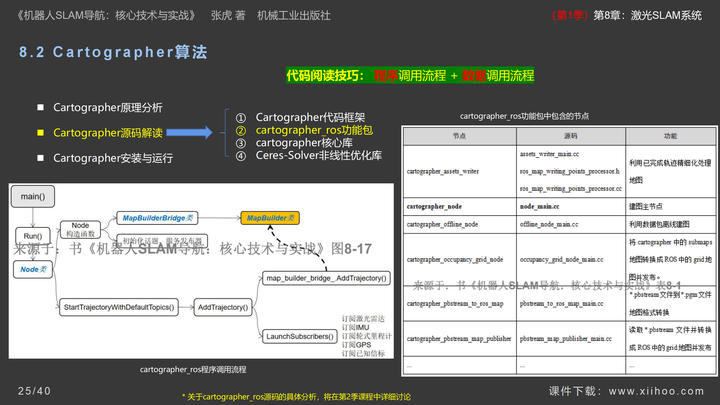
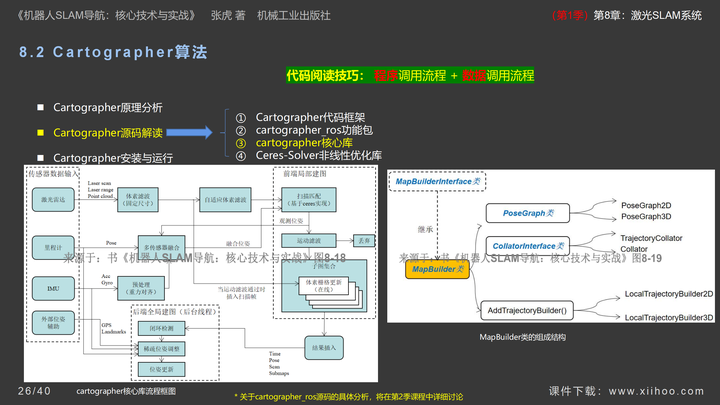
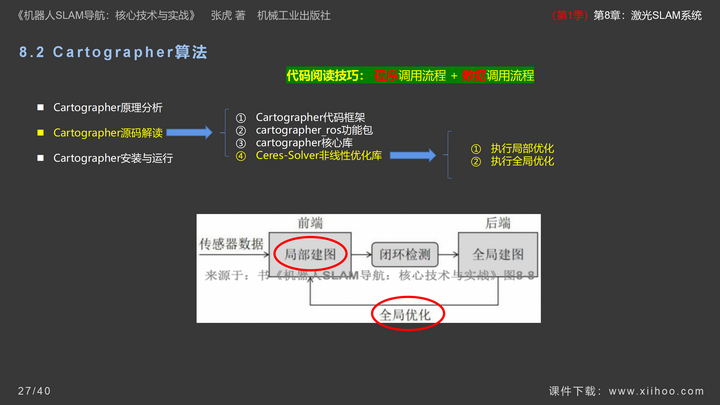
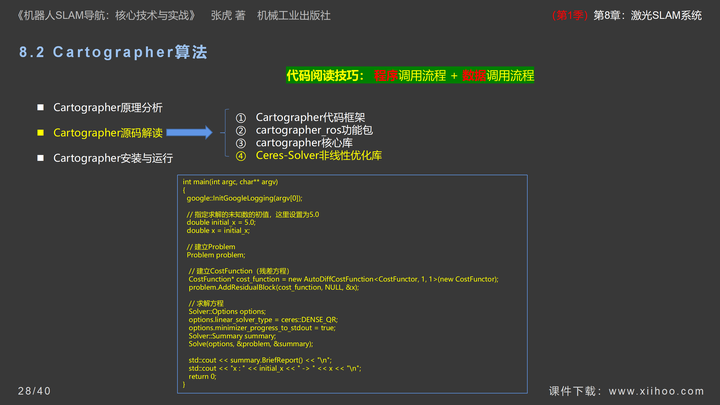
②Cartographer源码解读
Cartographer代码框架、cartographer_ros功能包、cartographer核心库、Ceres-Solver非线性优化库
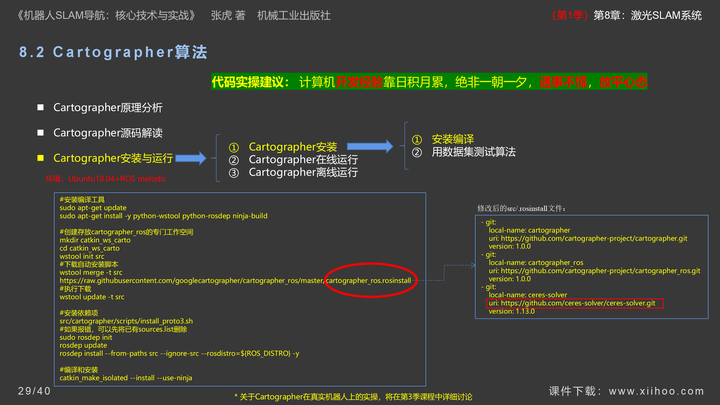
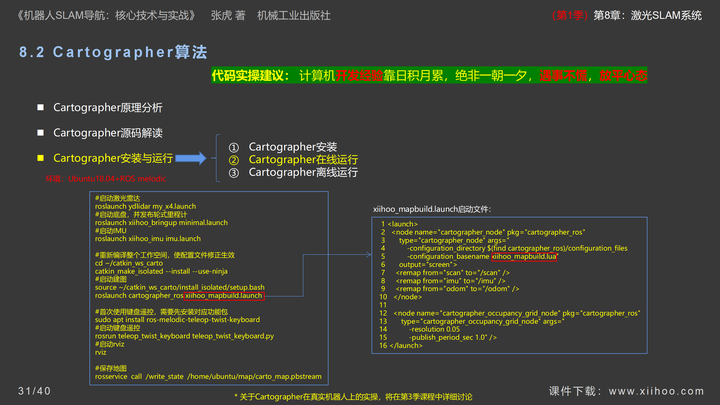
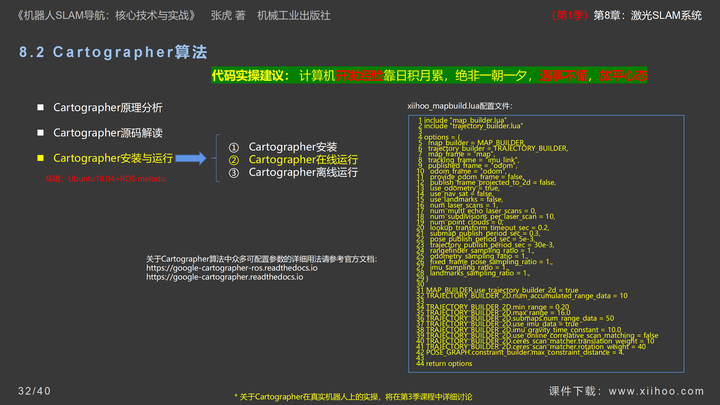
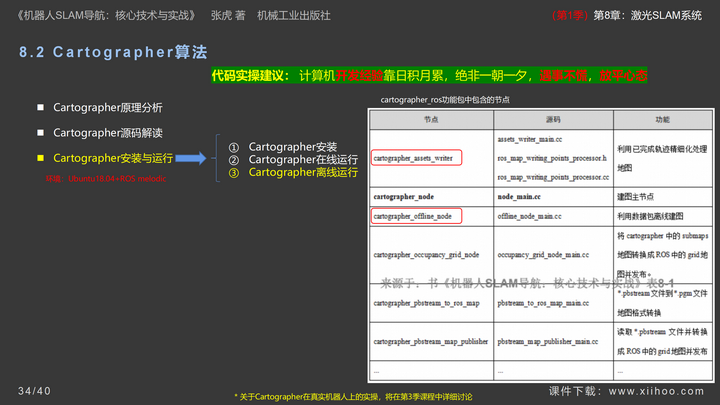
③Cartographer安装与运行
Cartographer安装、Cartographer在线运行、Cartographer离线运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
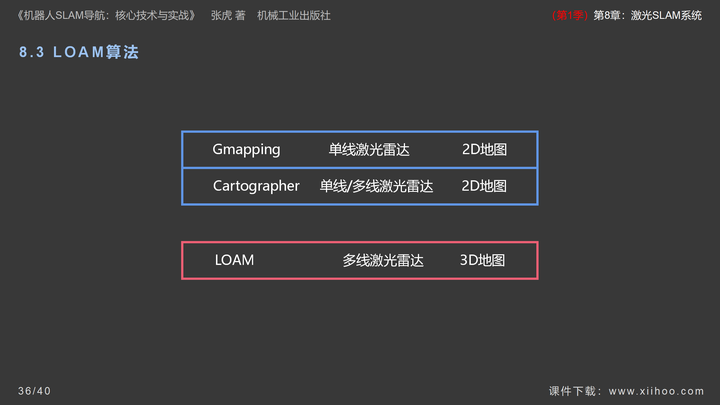
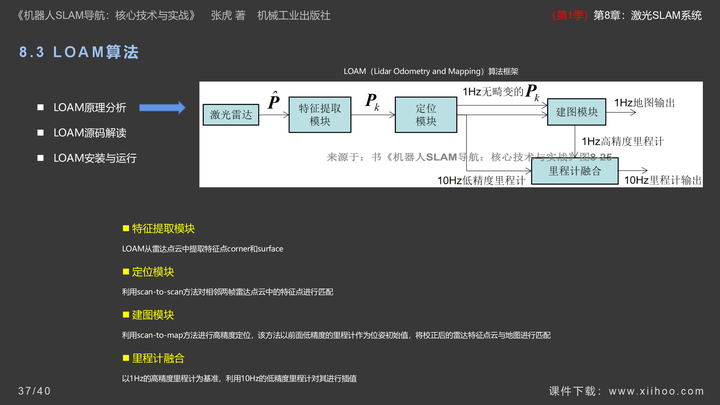
8.3 LOAM算法
①LOAM原理分析
②LOAM源码解读
③LOAM安装与运行
添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)

添加图片注释,不超过 140 字(可选)
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底
合集:
机器人SLAM导航



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· 单线程的Redis速度为什么快?