
《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机
《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机
视频讲解
第1季:第5章_机器人传感器
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
本书内容安排

机器人的大脑,里面是啥样?

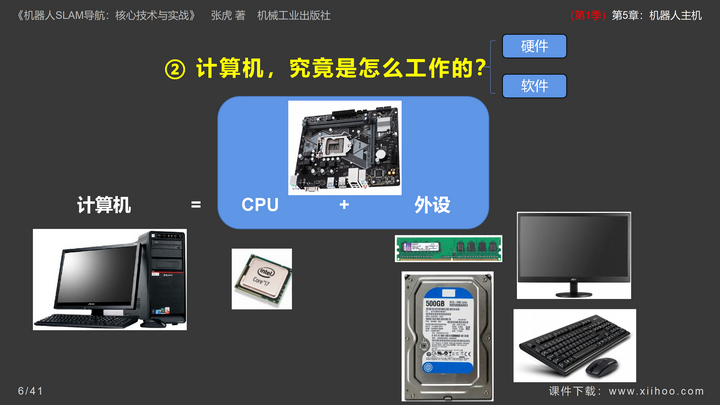
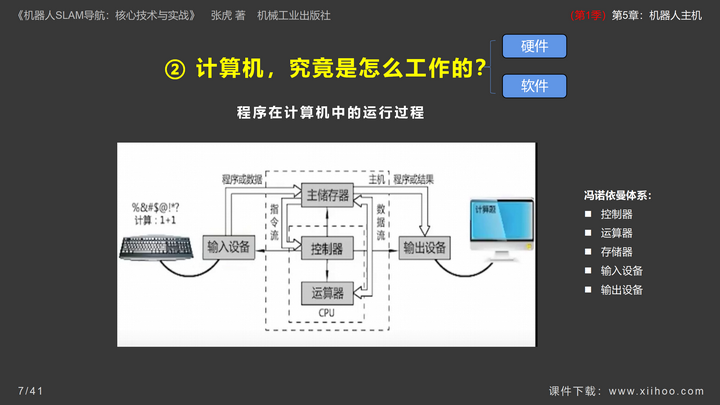
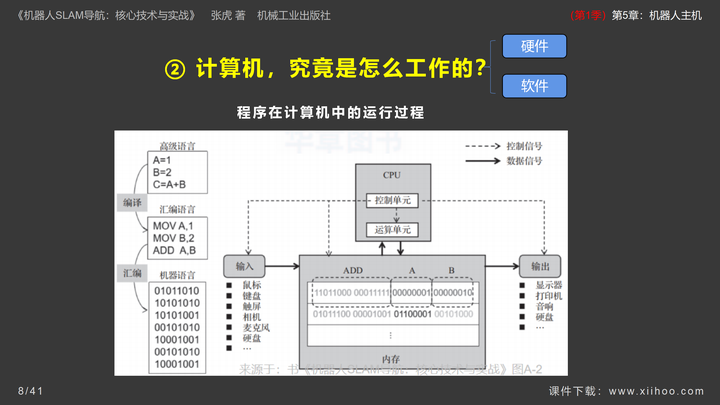
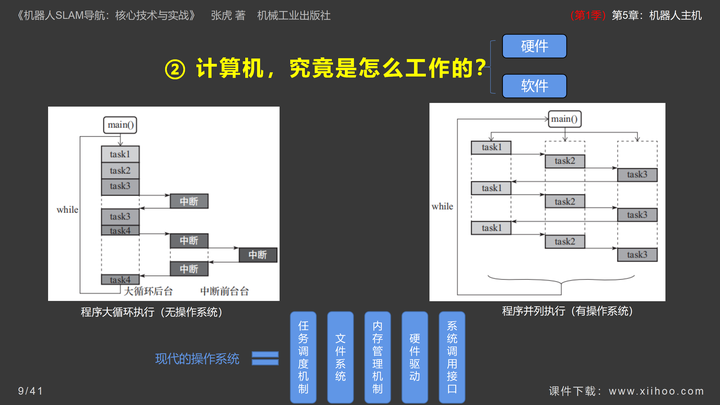
计算机,究竟是怎么工作的?

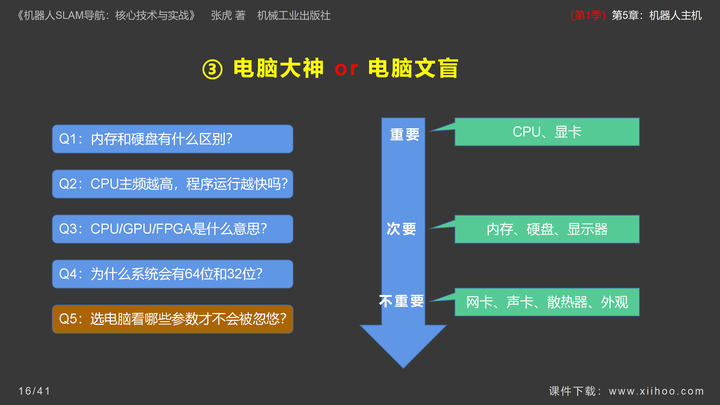
电脑大神 or 电脑文盲
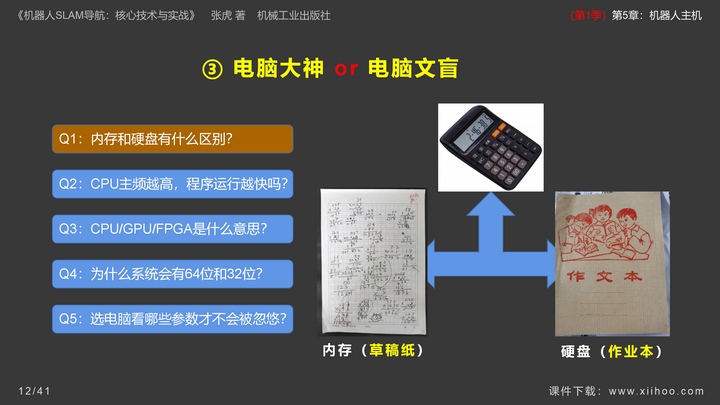
Q1:内存和硬盘有什么区别?
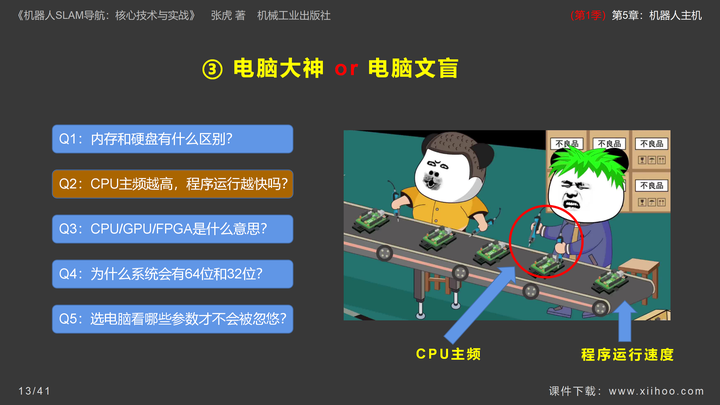
Q2:CPU主频越高,程序运行越快吗?
Q3:CPU/GPU/FPGA是什么意思?
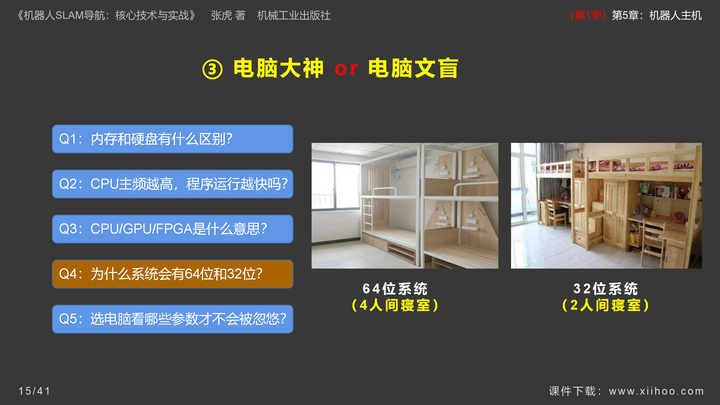
Q4:为什么系统会有64位和32位?
Q5:选电脑看哪些参数才不会被忽悠?

机器人主机,你真的选对了吗?

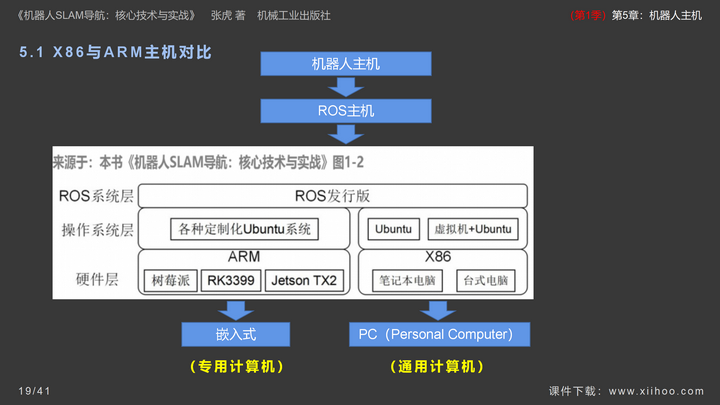
5.1 X86与ARM主机对比
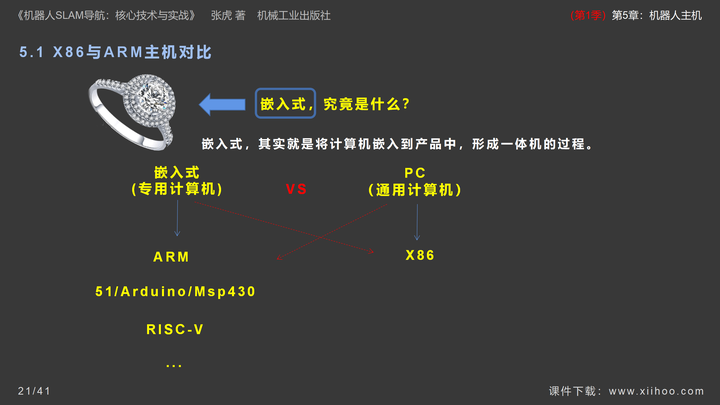
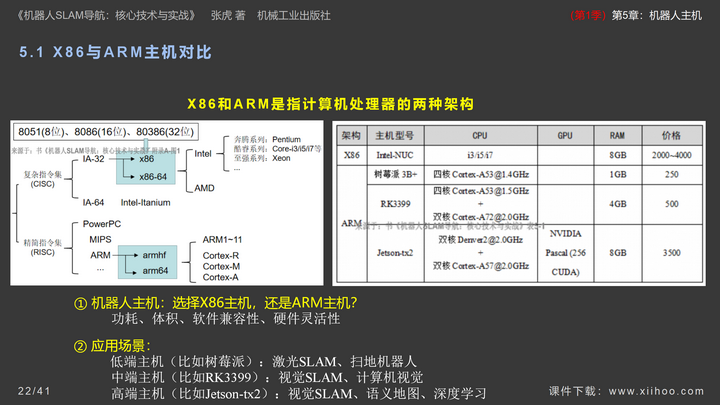
嵌入式,其实就是将计算机嵌入到产品中,形成一体机的过程。X86和ARM是指计算机处理器的两种架构。
① 机器人主机:选择X86主机,还是ARM主机?
功耗、体积、软件兼容性、硬件灵活性
② 应用场景:
低端主机(比如树莓派):激光SLAM、扫地机器人
中端主机(比如RK3399):视觉SLAM、计算机视觉
高端主机(比如Jetson-tx2):视觉SLAM、语义地图、深度学习

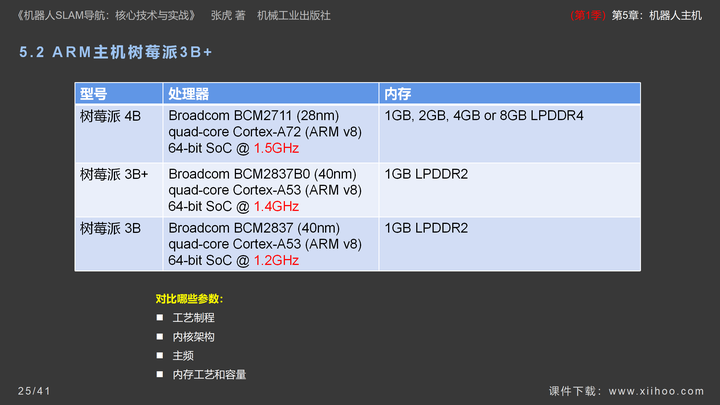
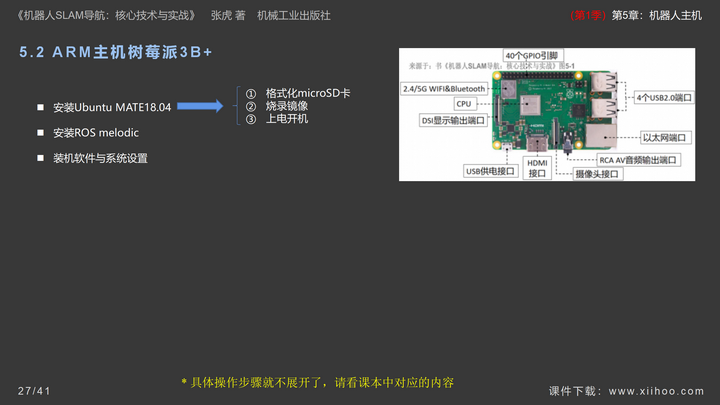
5.2 ARM主机树莓派3B+
安装Ubuntu MATE18.04
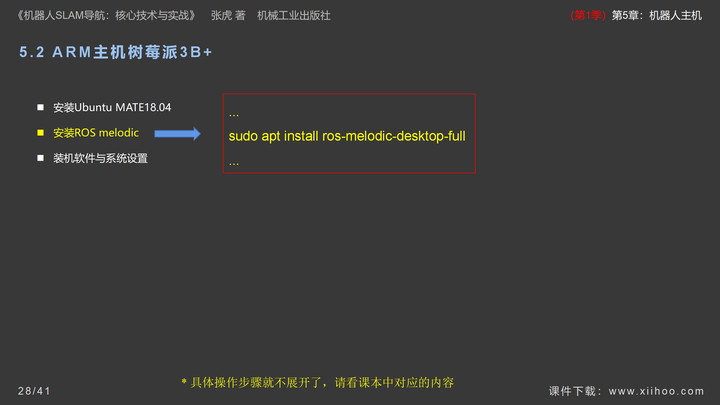
安装ROS melodic
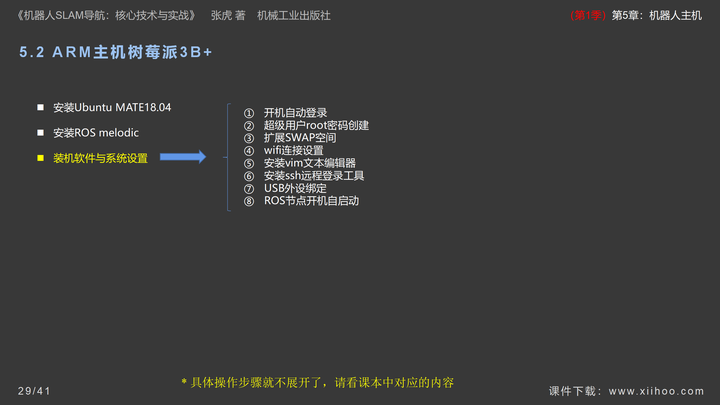
装机软件与系统设置


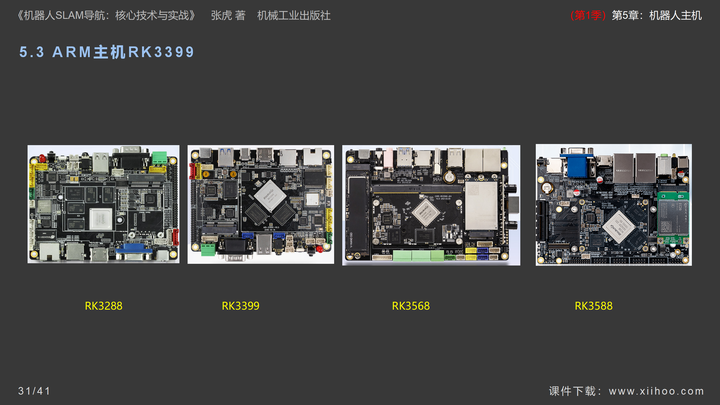
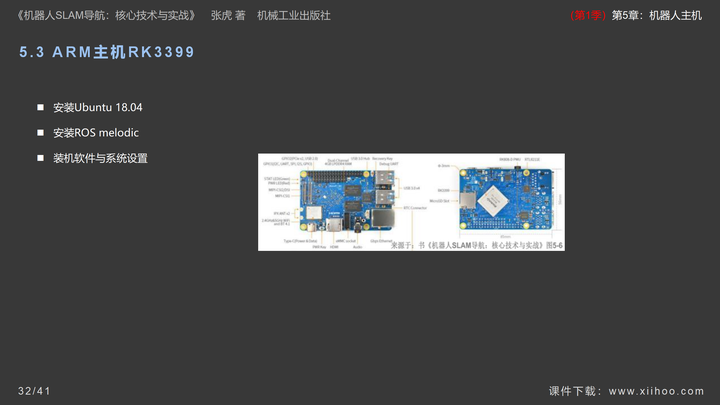
5.3 ARM主机RK3399
安装Ubuntu 18.04
安装ROS melodic
装机软件与系统设置
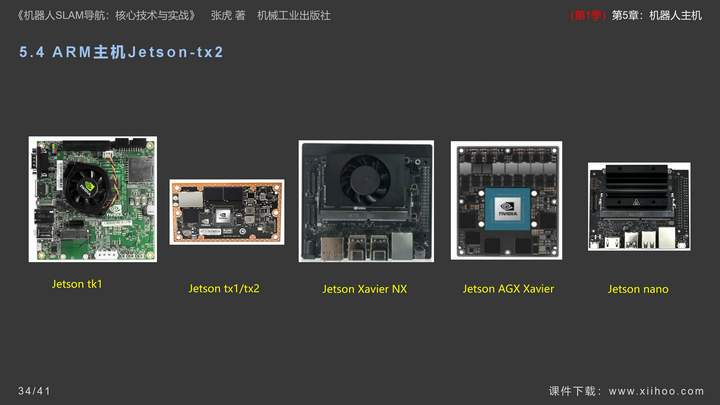
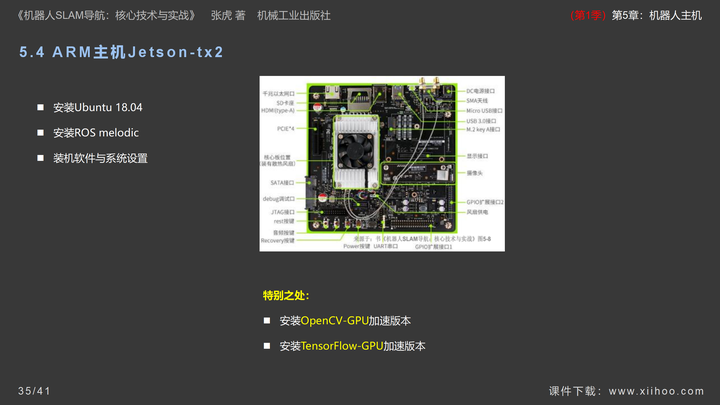
5.4 ARM主机Jetson-tx2
安装Ubuntu 18.04
安装ROS melodic
装机软件与系统设置
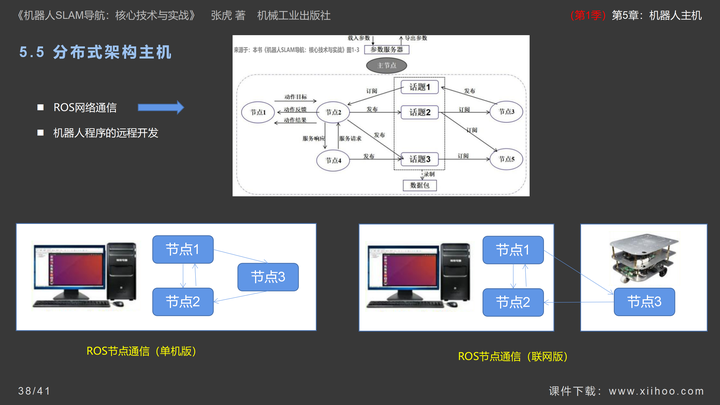
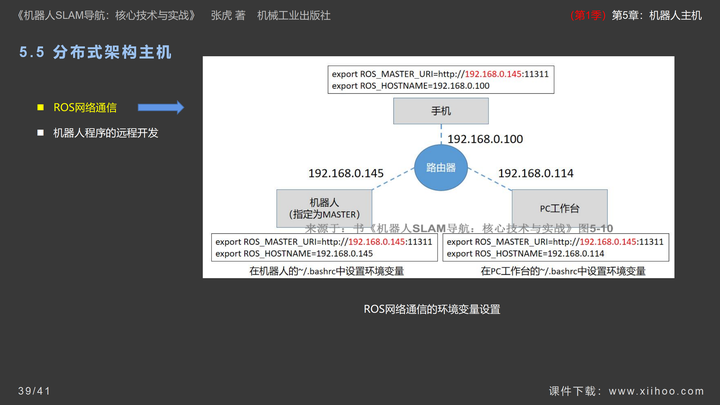
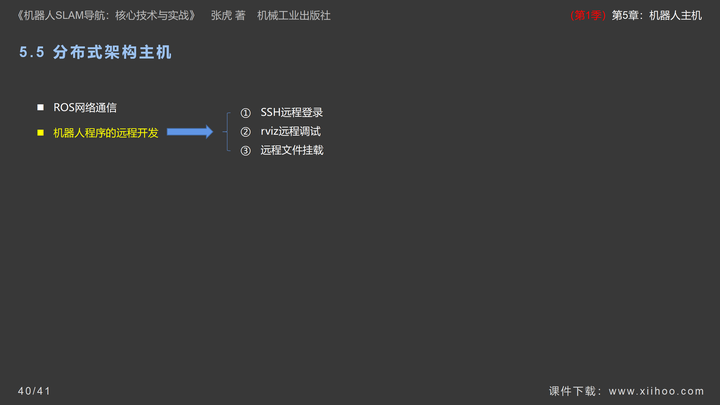
5.5 分布式架构主机
ROS网络通信
机器人程序的远程开发

例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底

 浙公网安备 33010602011771号
浙公网安备 33010602011771号