


《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
1.《机器人SLAM导航核心技术与实战》前言2.《机器人SLAM导航核心技术与实战》先导课:课程大纲3.《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统4.《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点5.《机器人SLAM导航核心技术与实战》第1季:第0章_SLAM发展综述6.《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识7.《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式8.《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理
9.《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
10.《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机11.《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘12.《机器人SLAM导航核心技术与实战》第1季:第7章_SLAM中的数学基础13.《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统14.《机器人SLAM导航核心技术与实战》第1季:第9章_视觉SLAM系统15.《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
视频讲解
第1季:第4章_机器人传感器
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

搞机器人,有必要学习硬件吗?


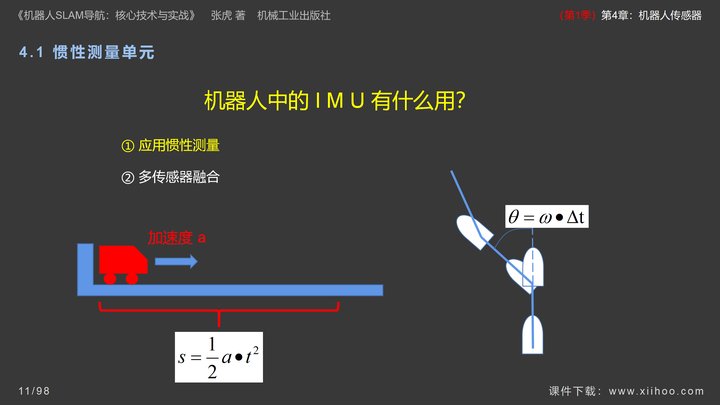
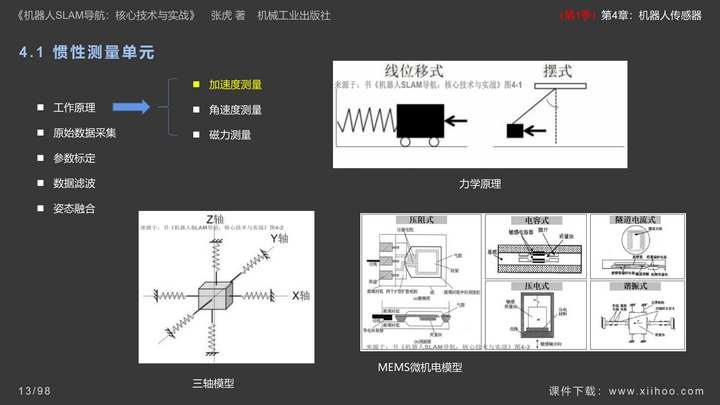
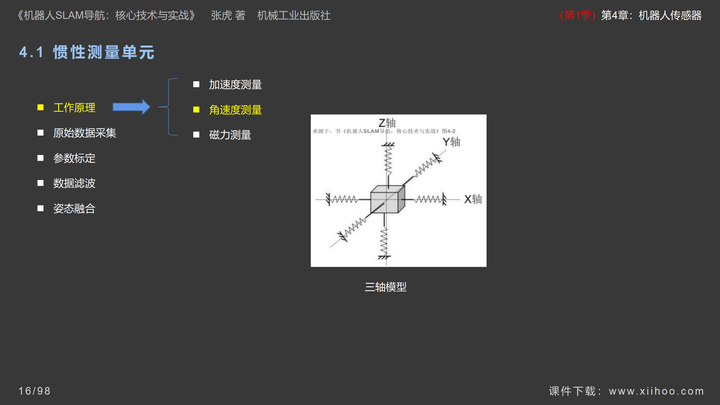
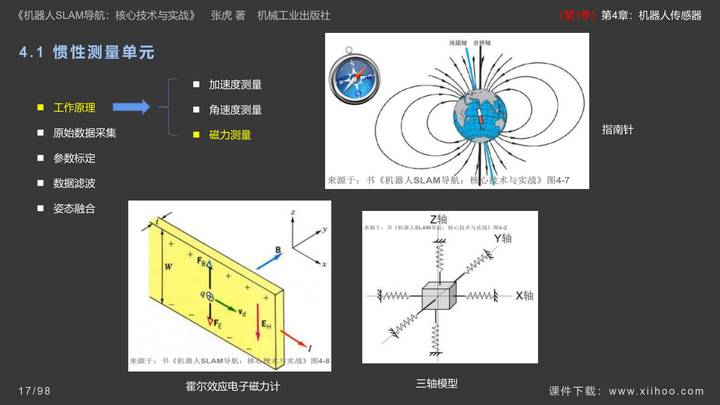
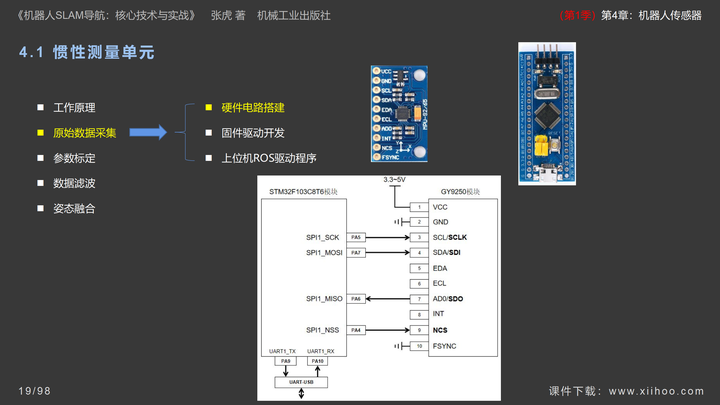
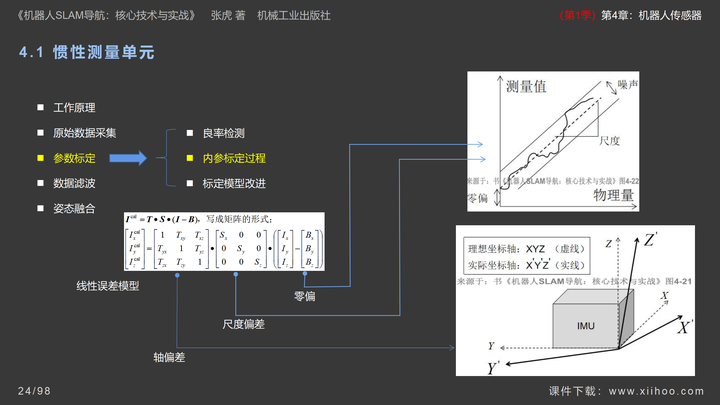
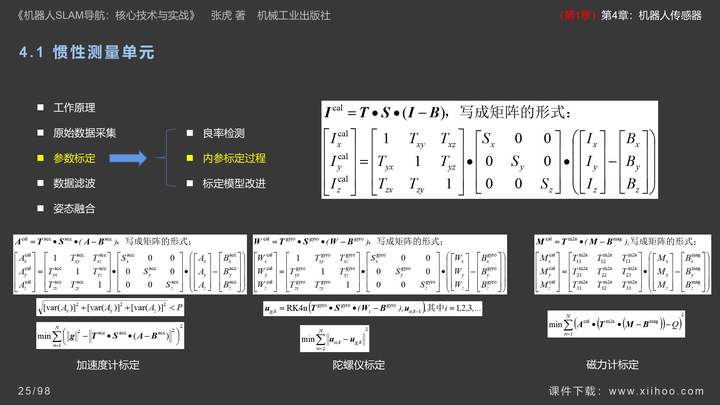
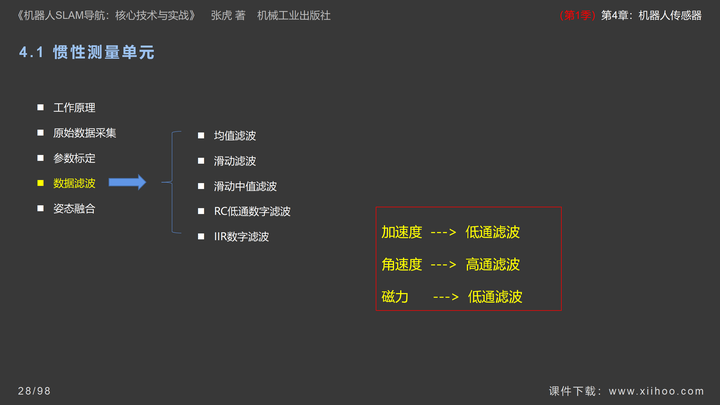
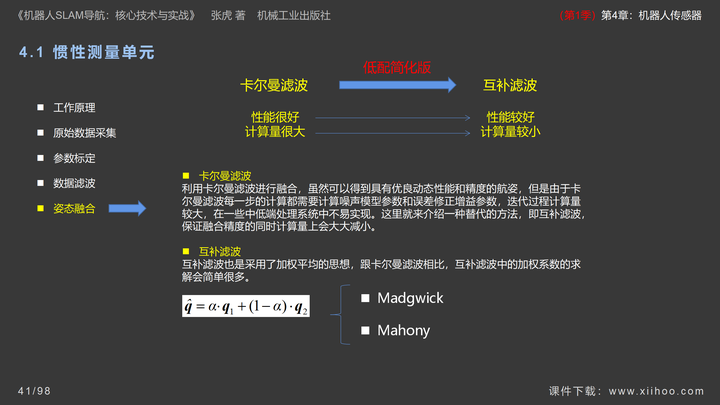
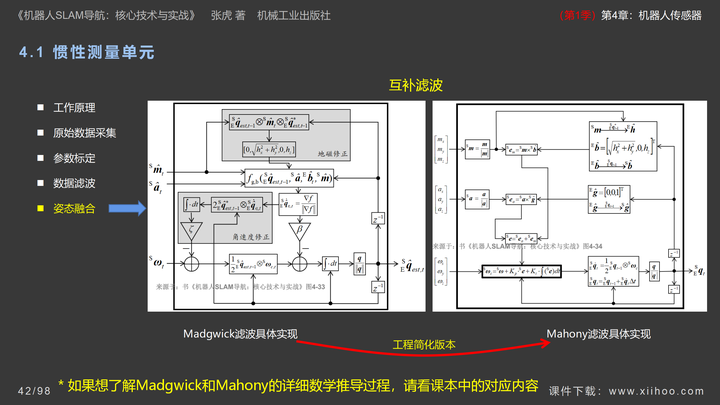
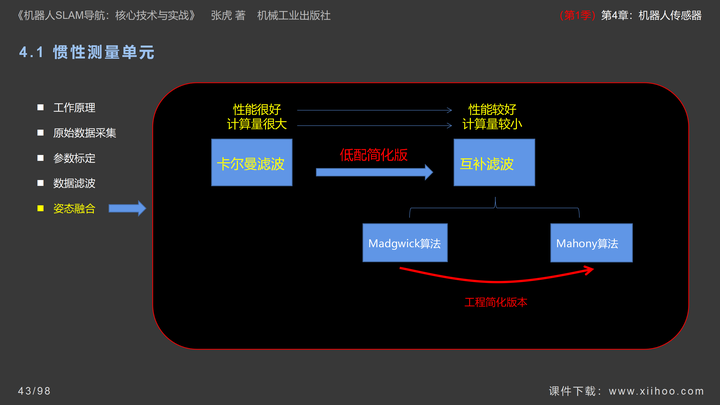
4.1 惯性测量单元
为什么能融合?
* IMU数据与其他传感器数据互补
* IMU数据频率很高

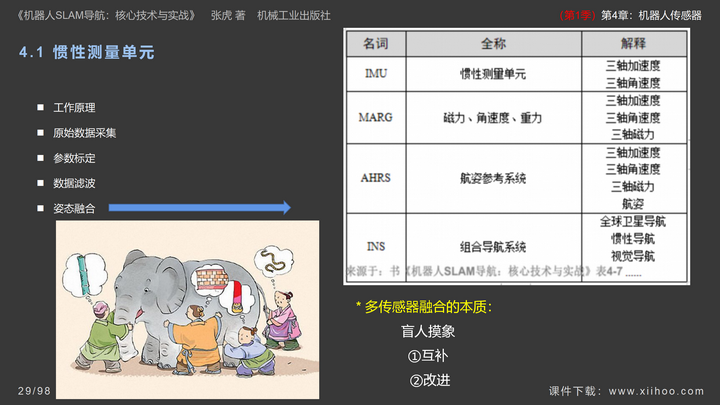
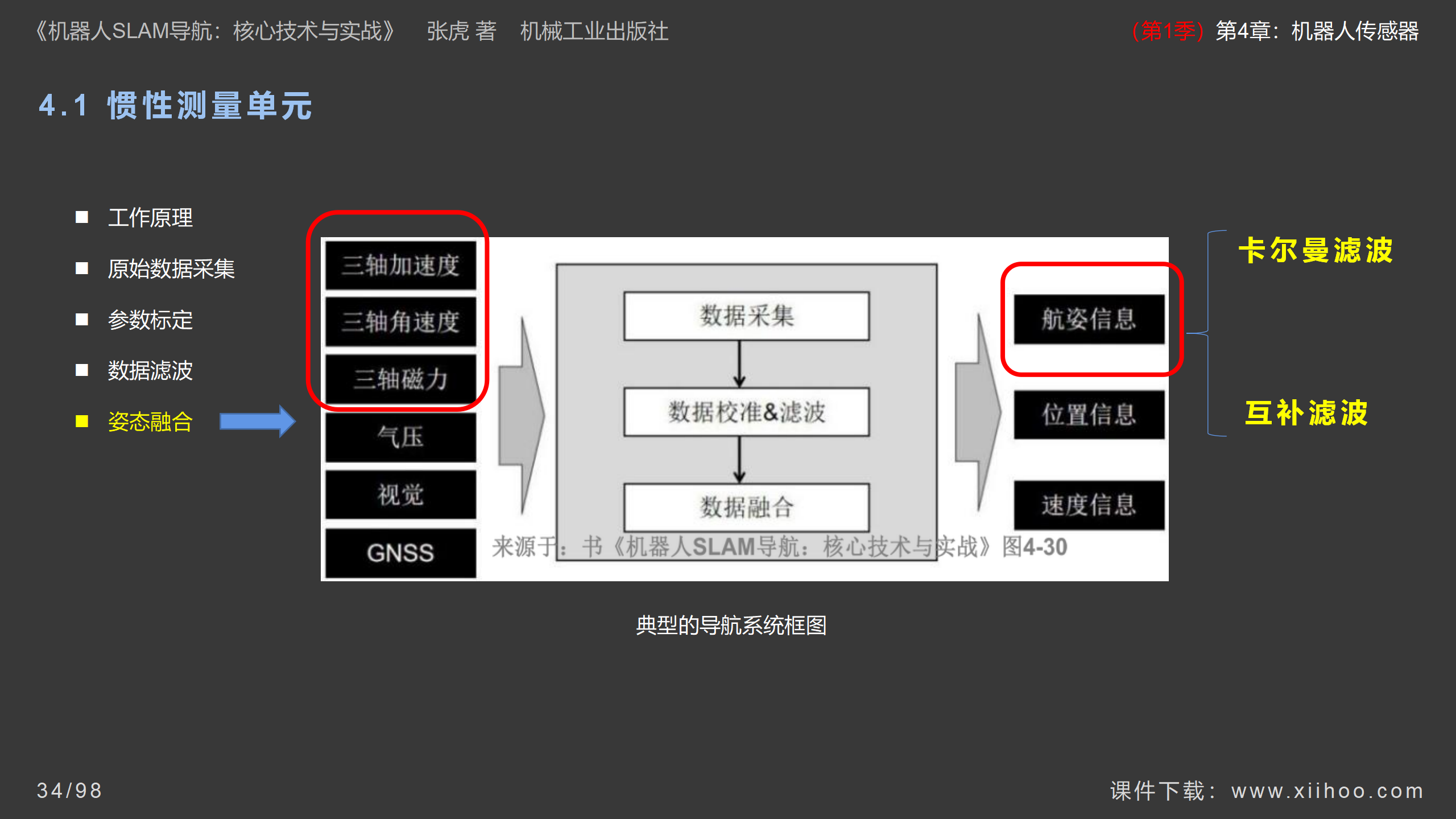
① 什么是九轴IMU?
三轴加速度、三轴角速度、三轴磁力、(气压)
② IMU有哪些性能参数?
量程、非线性度、零偏、轴间灵敏度、噪声密度、温偏
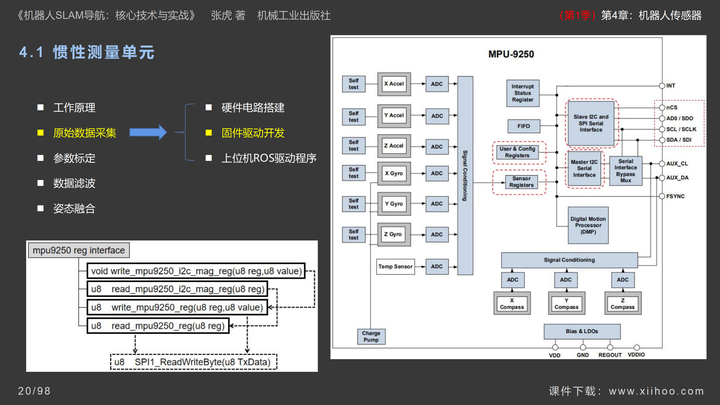
③ 有哪些常见的IMU芯片?
MPU9250、ADIS16405



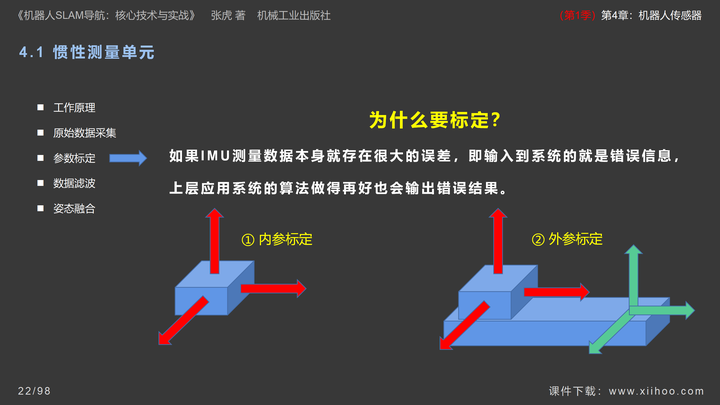
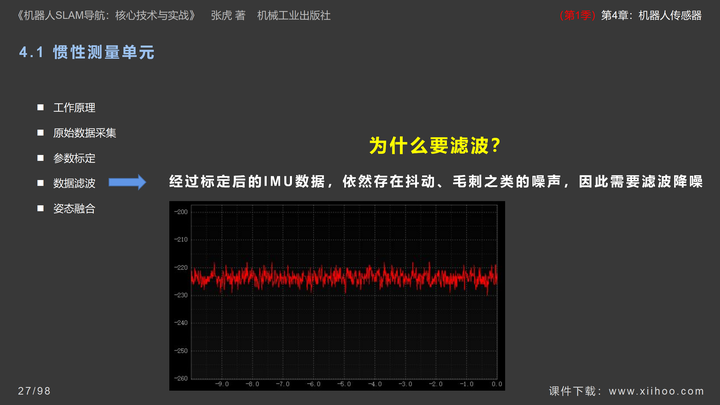
为什么要标定?
如果IMU测量数据本身就存在很大的误差,即输入到系统的就是错误信息,
上层应用系统的算法做得再好也会输出错误结果。
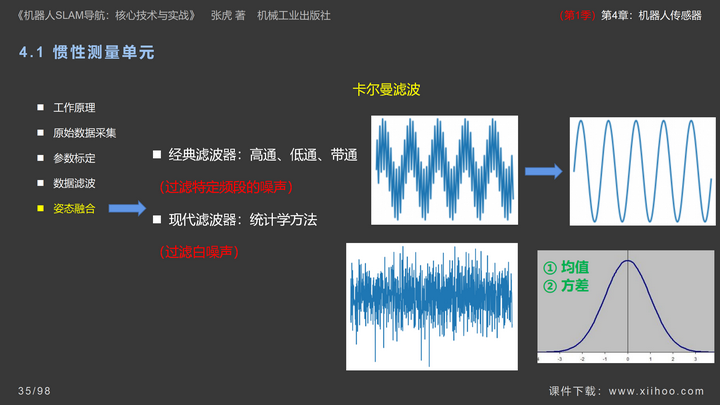
均值滤波
滑动滤波
滑动中值滤波
RC低通数字滤波
IIR数字滤波
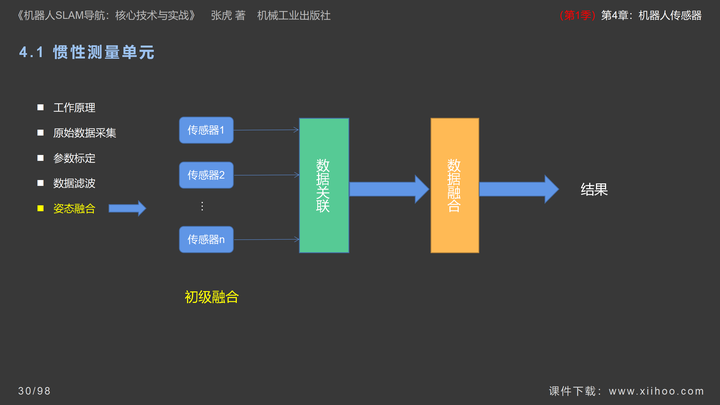
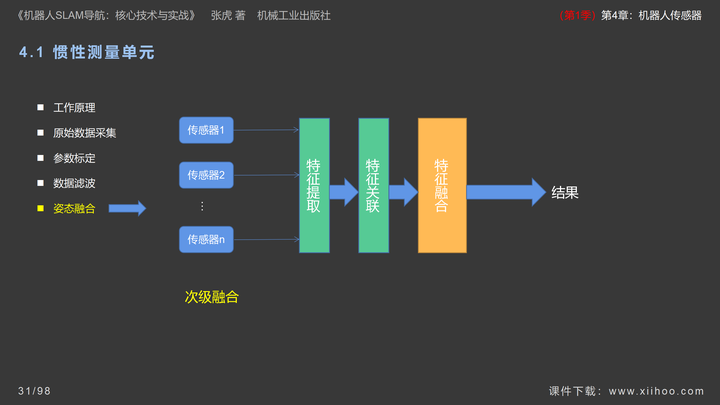
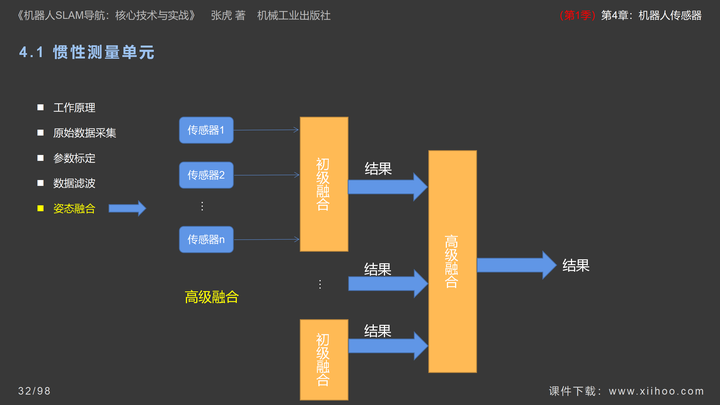
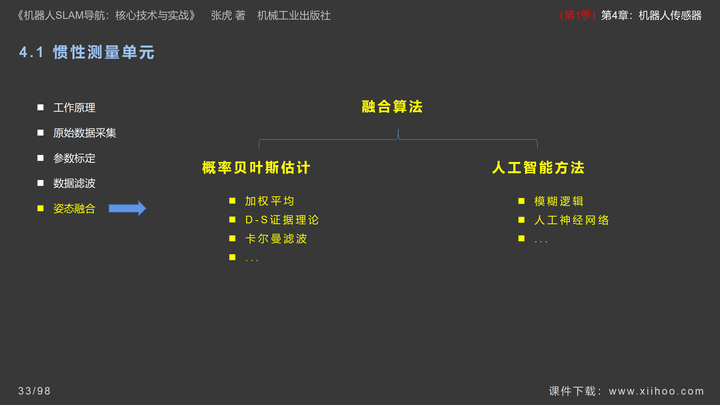
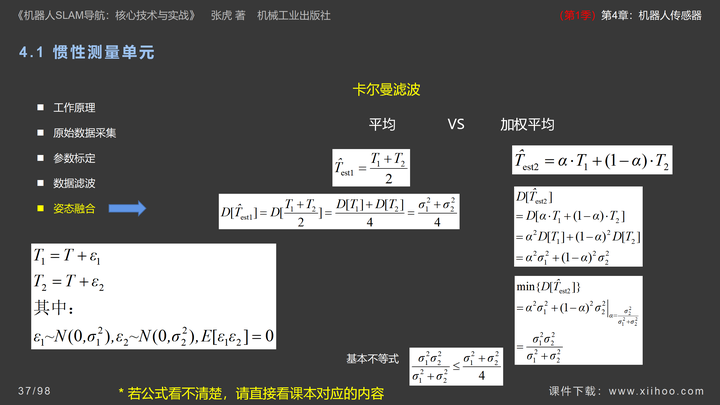
融合算法:
概率贝叶斯估计
---加权平均
---D-S证据理论
---卡尔曼滤波
---...
人工智能方法
---模糊逻辑
---人工神经网络
---...

① 卡尔曼滤波是一种很通用的思想,最优估计
信号处理、数据融合、EKF-SLAM、运动预测、自动控制
② 卡尔曼滤波,有很多变种
EKF/ESKF、UKF/CKF、SRCKF、FP_EKF
(解析法、点估计法、Square-Root Cubature KF、Fixed Point EKF)
③ 卡尔曼滤波的经典框架,要替换成具体的数学模型和数据参量
状态量(x),状态量协方差矩阵(P)
状态转移方程系数(A, B, Q)
观测方程系数(C, R)
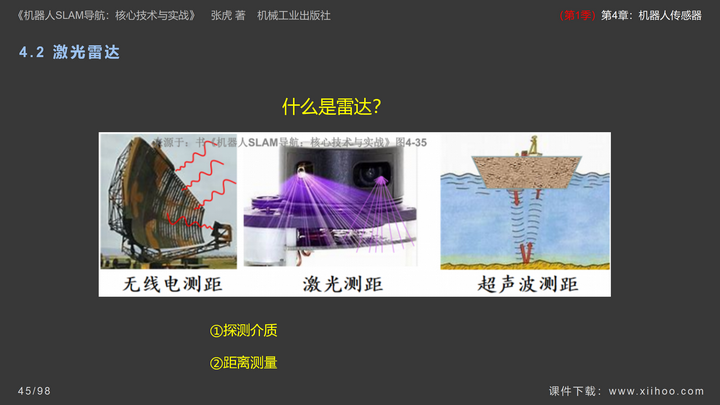
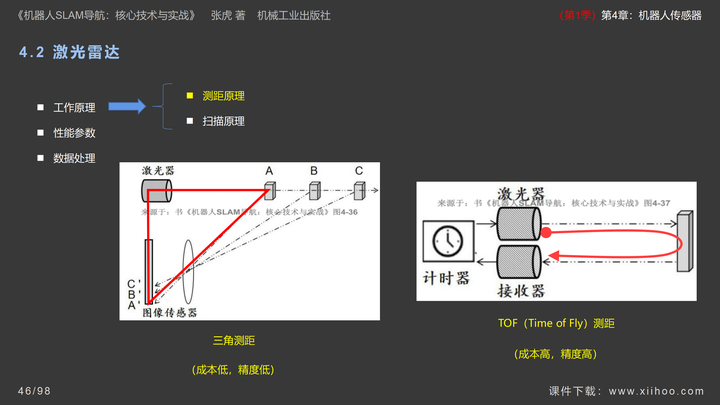
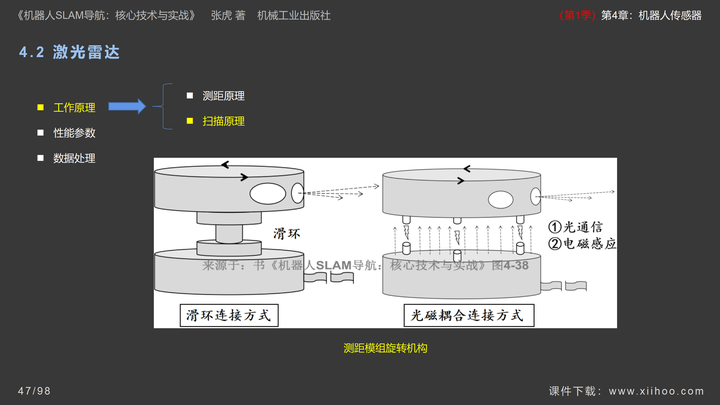
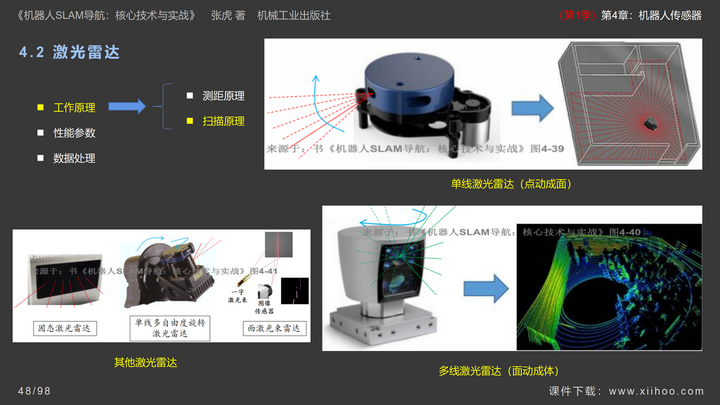
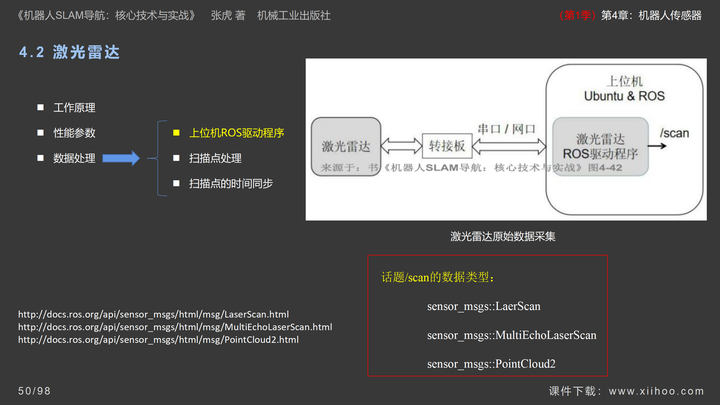
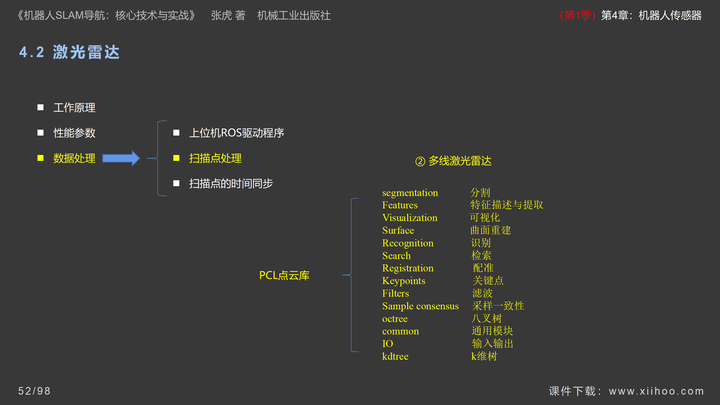
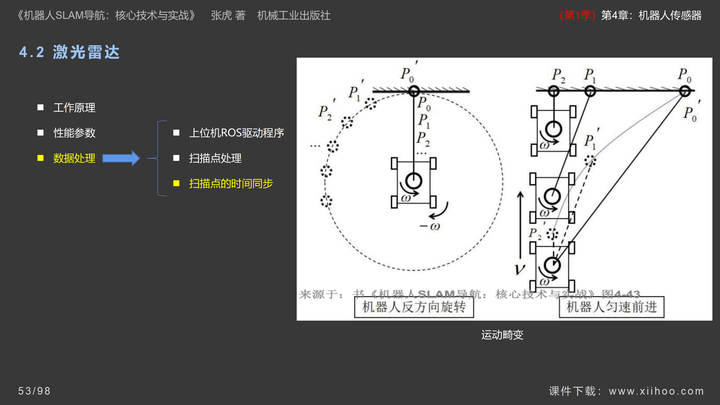
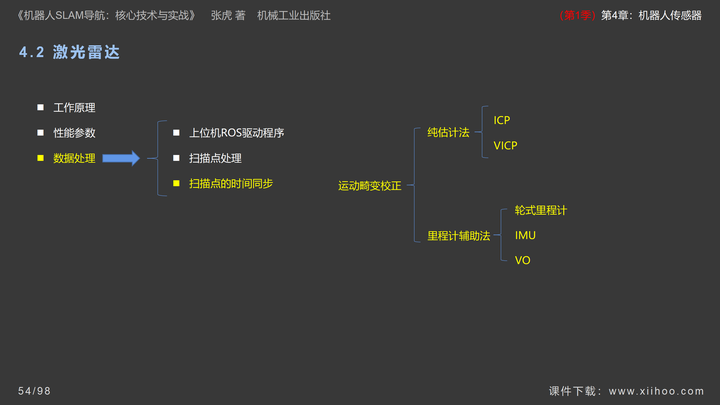
4.2 激光雷达
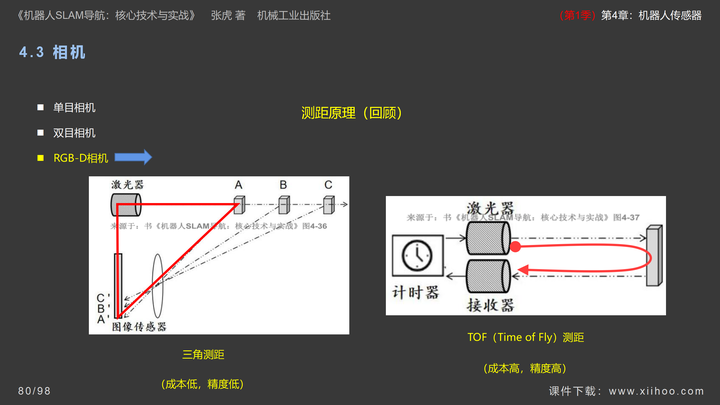
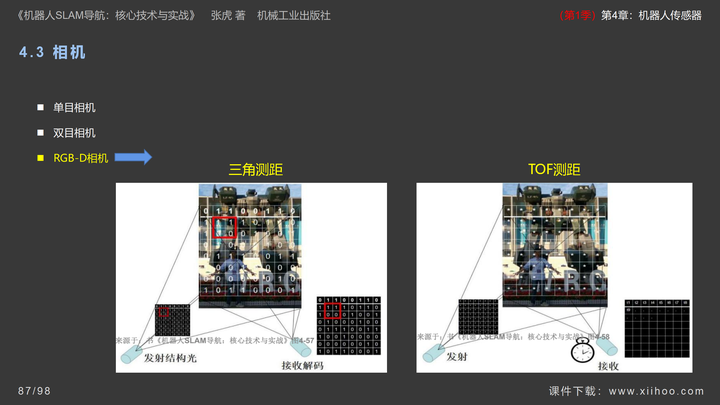
三角测距
TOF(Time of Fly)测距

laser_filters功能包:
LaserArrayFilter 将雷达数据存入数组便于后续处理
ScanShadowsFilter 滤除因自身遮挡而产生的干扰数据
InterpolationFilter 在可信任的扫描点之间插值
LaserScanIntensityFilter 滤除在设定强度阈值之外的数据
LaserScanRangeFilter 滤除在设定距离范围之外的数据
LaserScanAngularBoundsFilter 滤除在设定扫描角度范围之外的数据
LaserScanAngularBoundsFilterInPlace 滤除在设定扫描角度范围之内的数据
LaserScanBoxFilter 滤除在设定区域范围之内的数据

PCL点云库:
segmentation 分割
Features 特征描述与提取
Visualization 可视化
Surface 曲面重建
Recognition 识别
Search 检索
Registration 配准
Keypoints 关键点
Filters 滤波
Sample consensus 采样一致性
octree 八叉树
common 通用模块
IO 输入输出
kdtree k维树
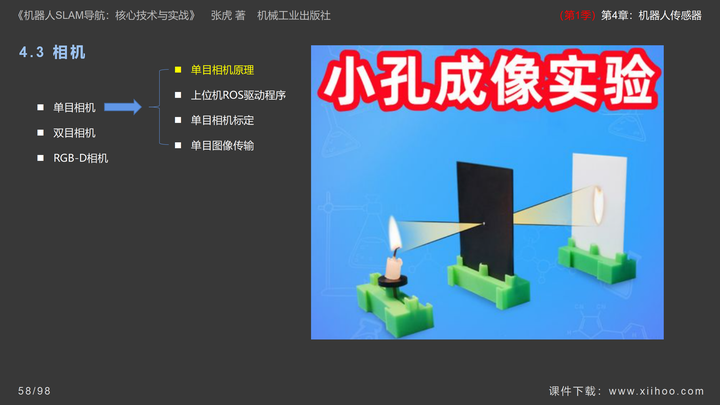
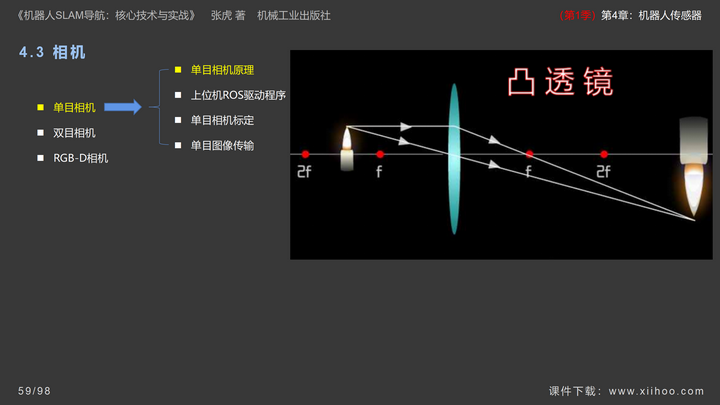
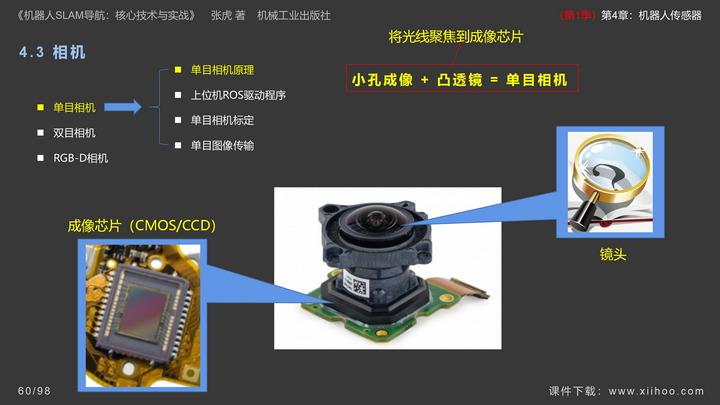
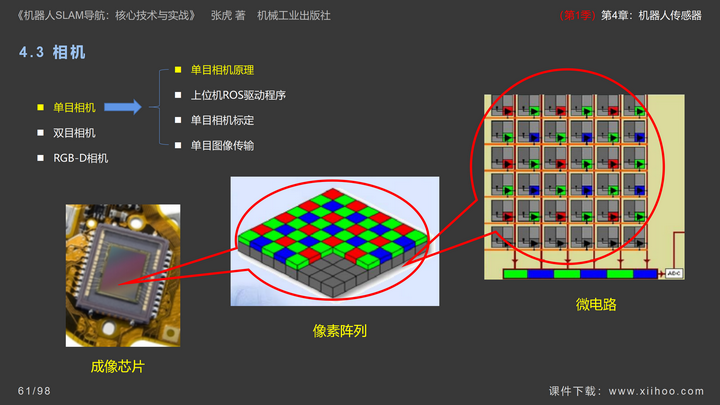
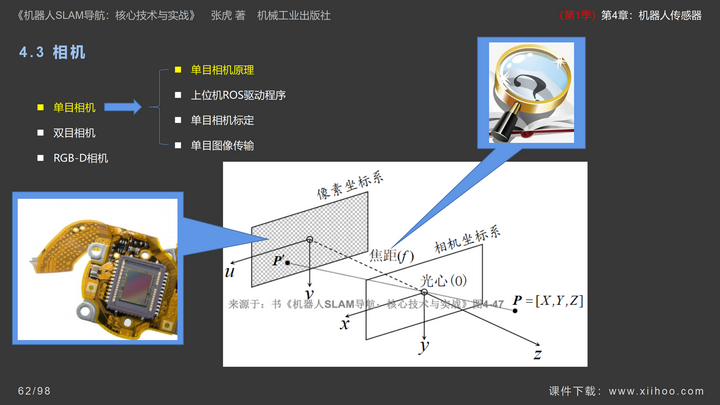
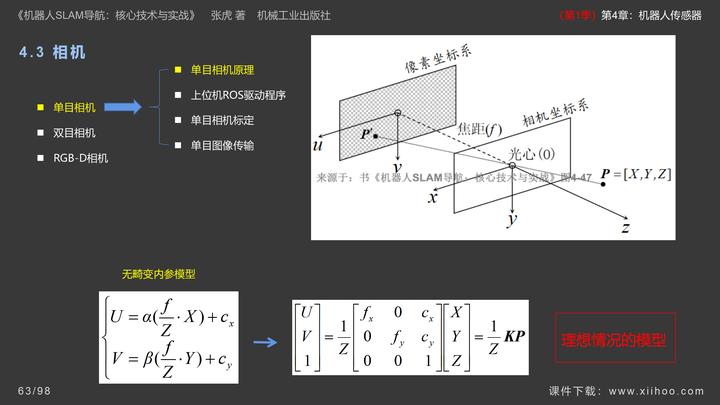
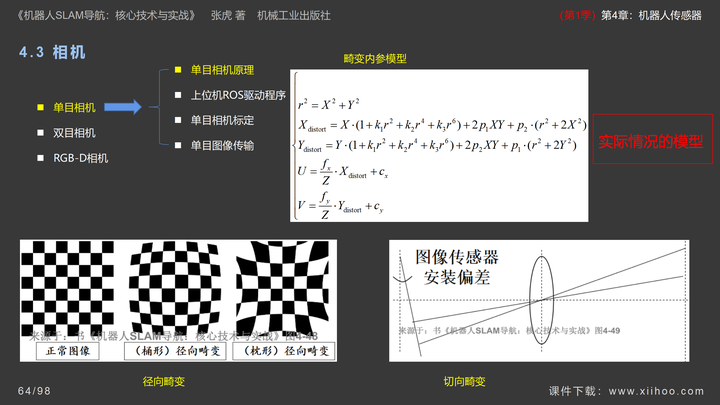
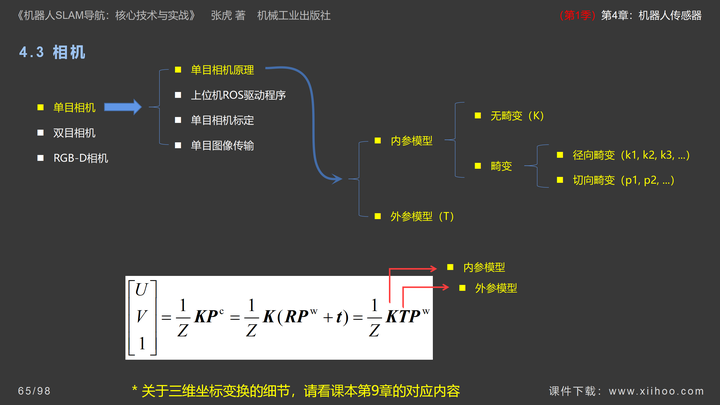
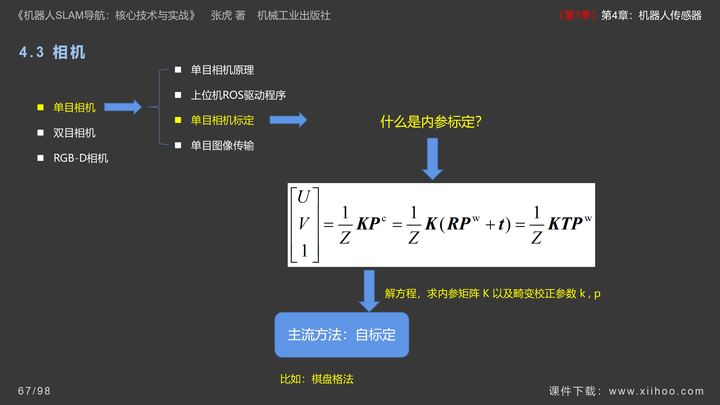
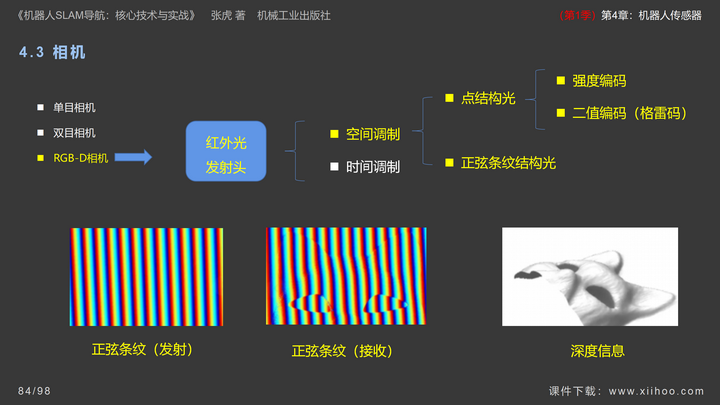
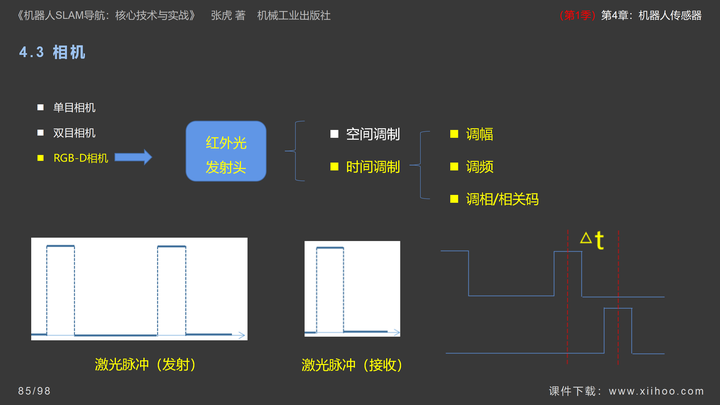
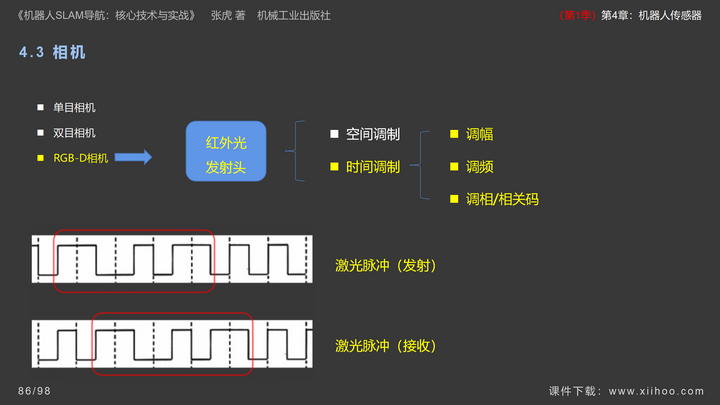
4.3 相机
单目相机
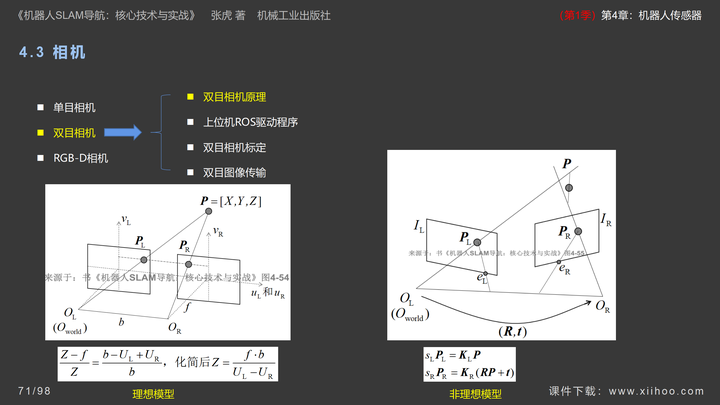
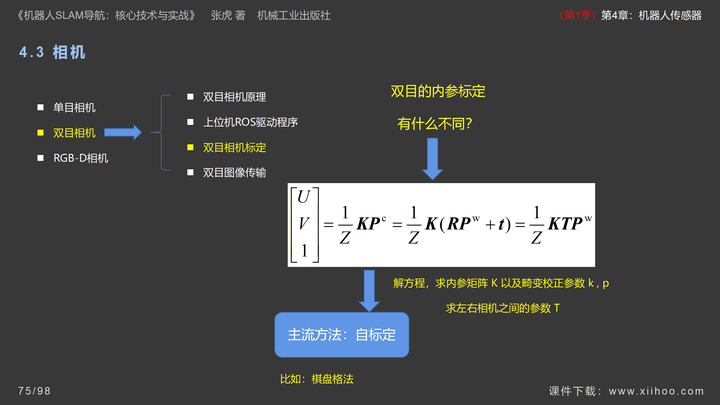
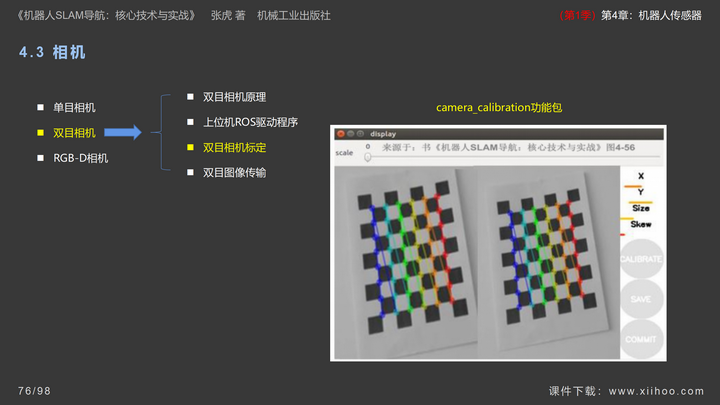
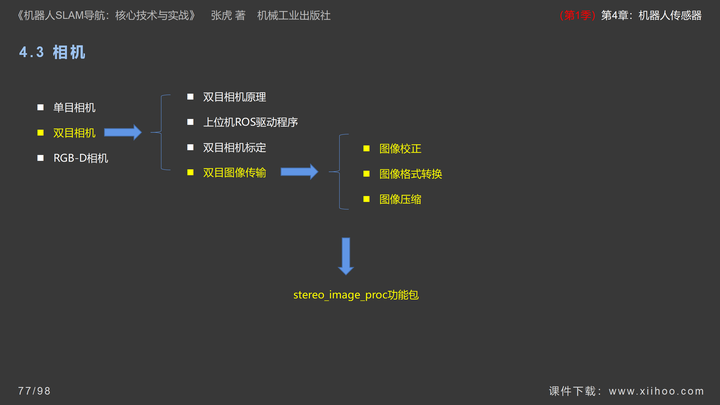
双目相机
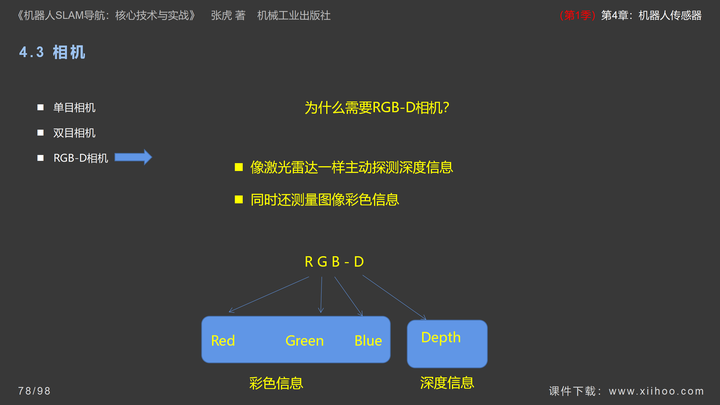
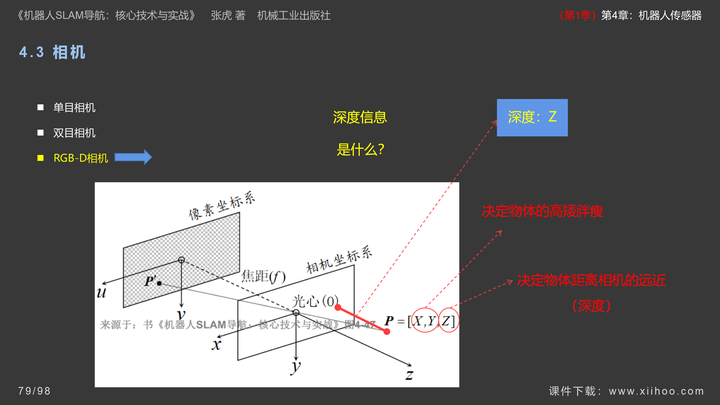
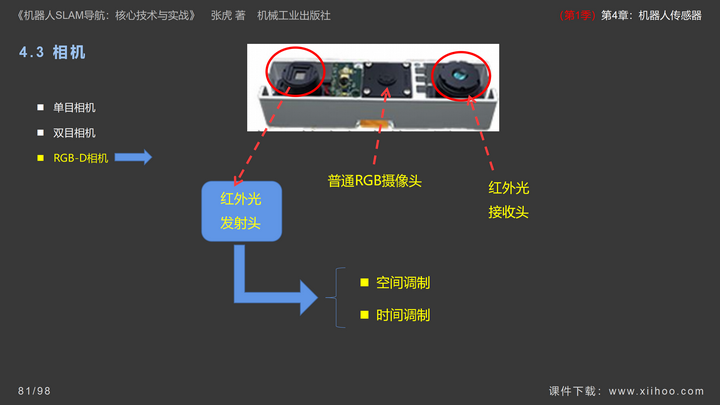
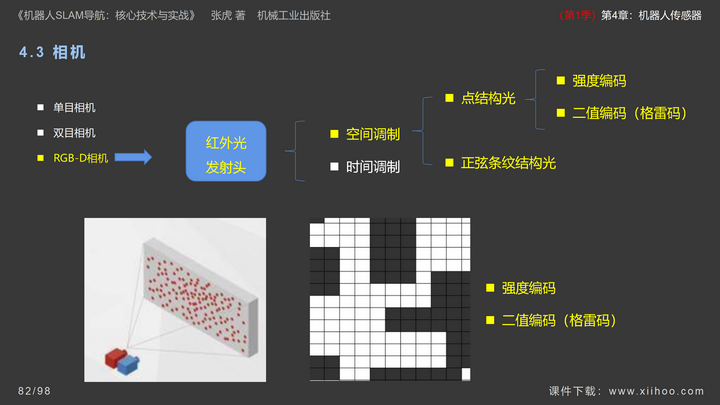
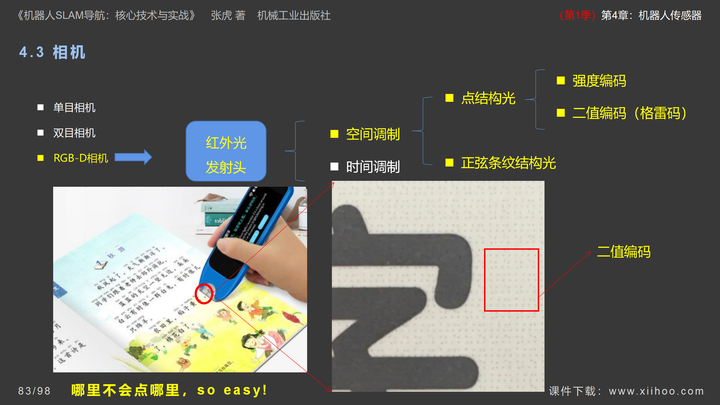
RGB-D相机


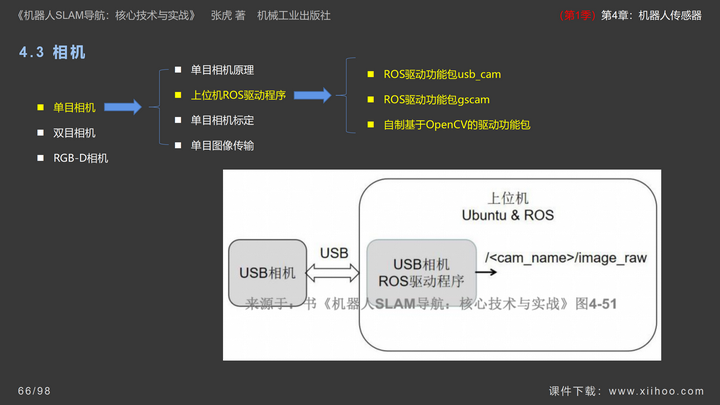
ROS驱动功能包usb_cam
ROS驱动功能包gscam
自制基于OpenCV的驱动功能包





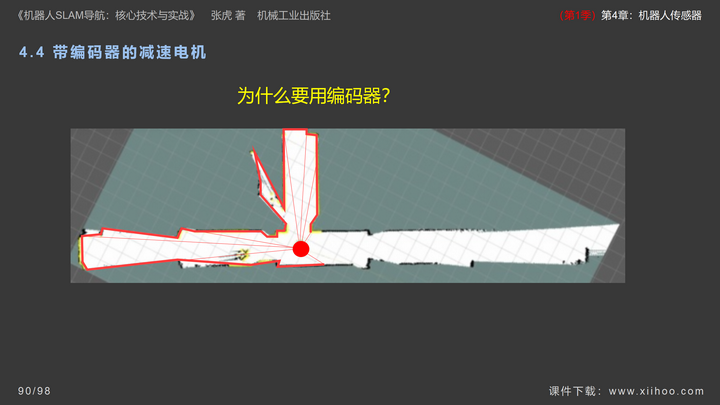
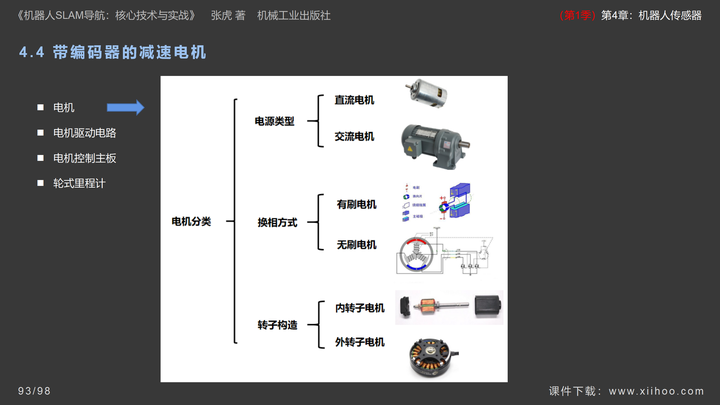
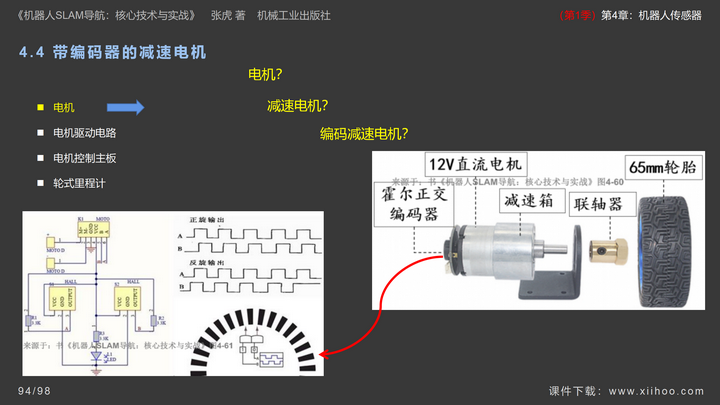
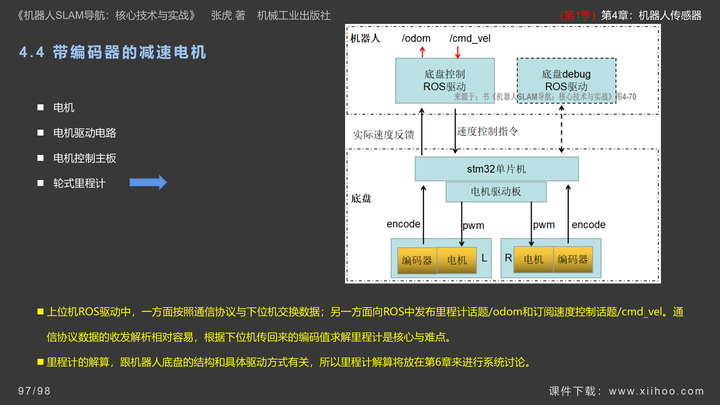
4.4 带编码器的减速电机
电机
电机驱动电路
电机控制主板
轮式里程计




例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· 单线程的Redis速度为什么快?