


《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理
1.《机器人SLAM导航核心技术与实战》前言2.《机器人SLAM导航核心技术与实战》先导课:课程大纲3.《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统4.《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点5.《机器人SLAM导航核心技术与实战》第1季:第0章_SLAM发展综述6.《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识7.《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式
8.《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理
9.《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器10.《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机11.《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘12.《机器人SLAM导航核心技术与实战》第1季:第7章_SLAM中的数学基础13.《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统14.《机器人SLAM导航核心技术与实战》第1季:第9章_视觉SLAM系统15.《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理
视频讲解
第1季:第3章_OpenCV图像处理
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
本书内容安排

机器人、图像处理 和 OpenCV 是什么关系?
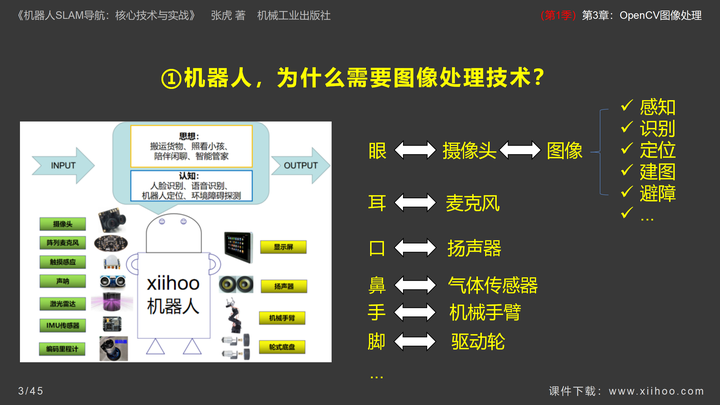
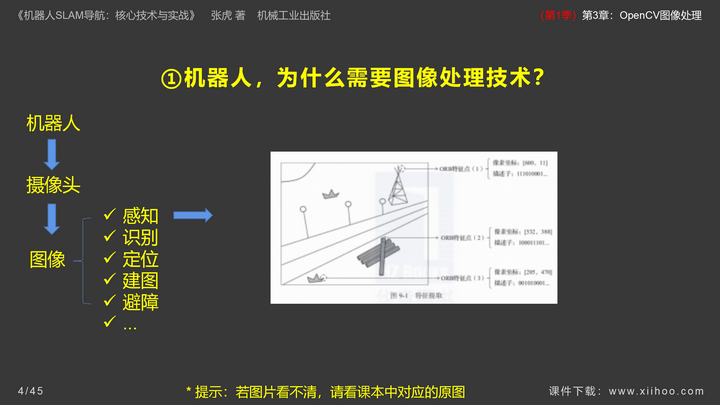
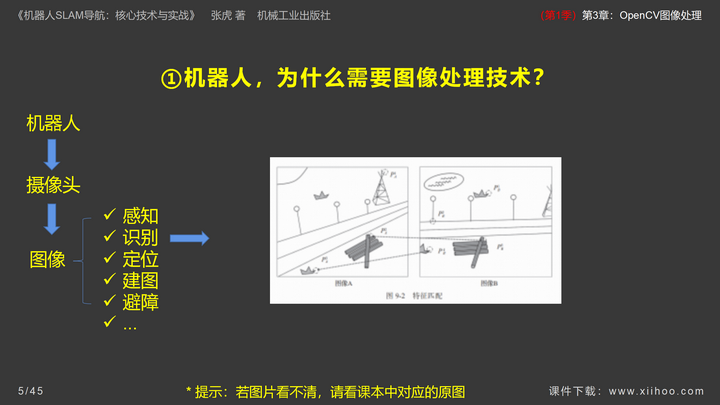
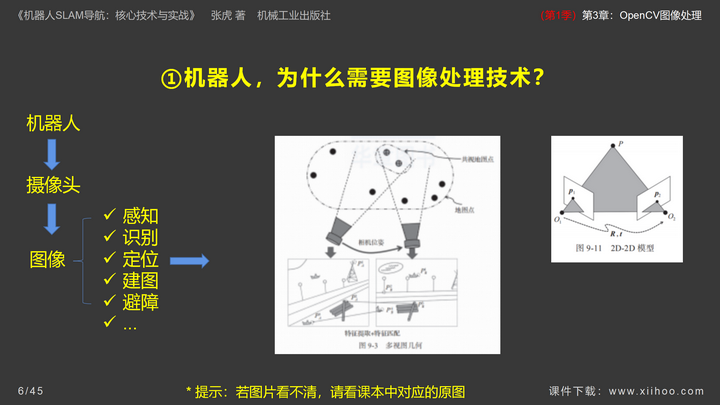
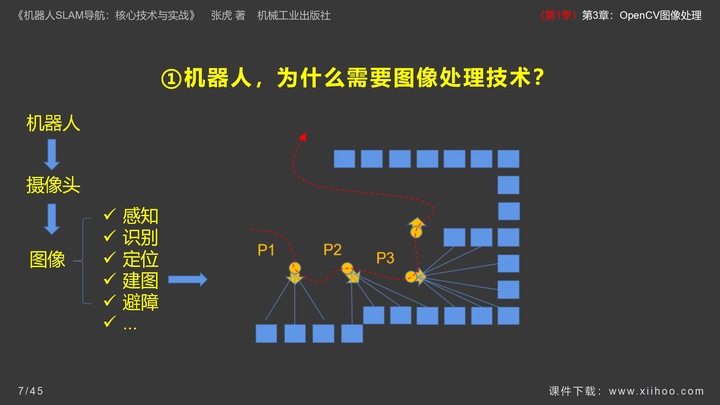
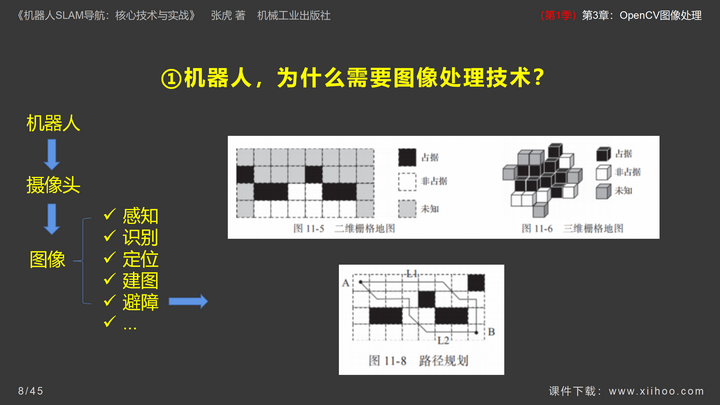
①机器人,为什么需要图像处理技术?
感知
识别
定位
建图
避障
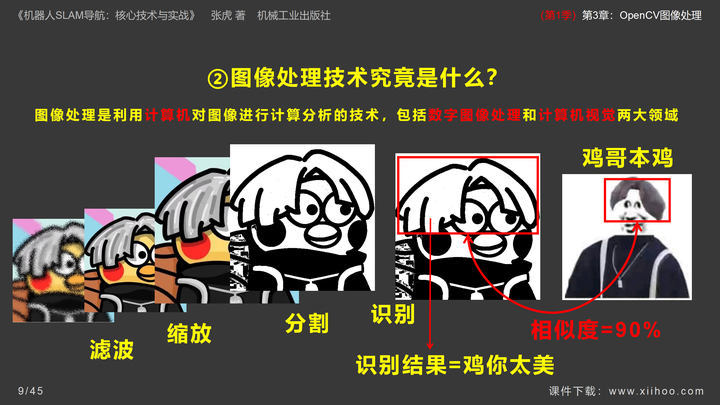
②图像处理技术究竟是什么?
图像处理是利用计算机对图像进行计算分析的技术,包括数字图像处理和计算机视觉两大领域




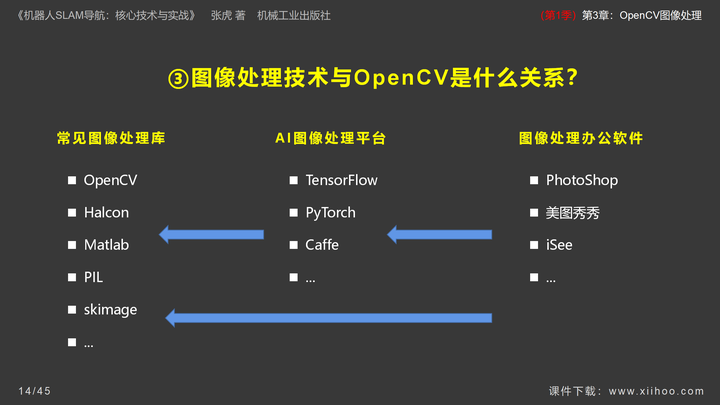
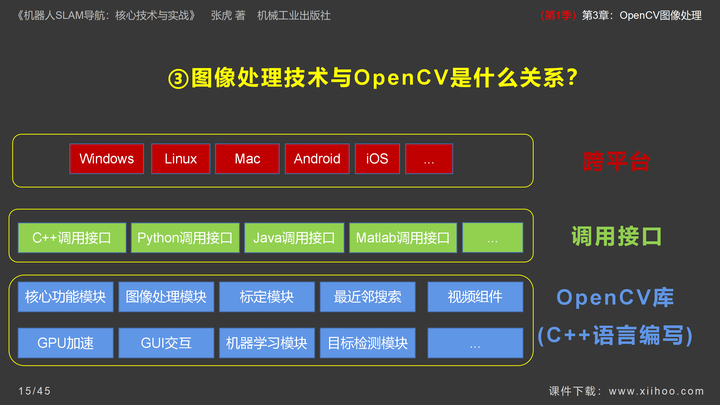
③图像处理技术与OpenCV是什么关系?
常见图像处理库
OpenCV
Halcon
Matlab
PIL
skimage
...
AI图像处理平台
TensorFlow
PyTorch
Caffe
...
图像处理办公软件
PhotoShop
美图秀秀
iSee
...
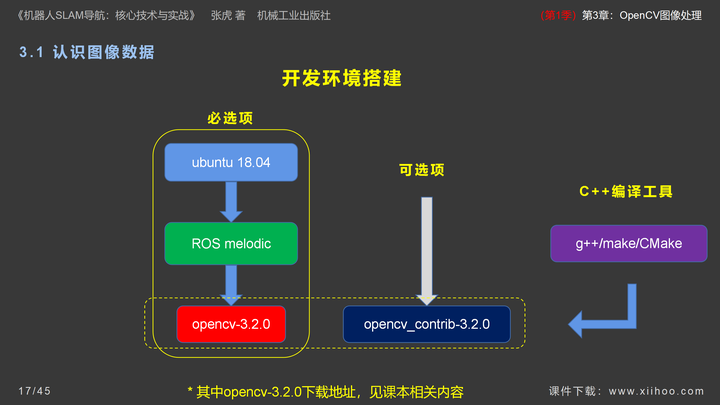
3.1 认识图像数据


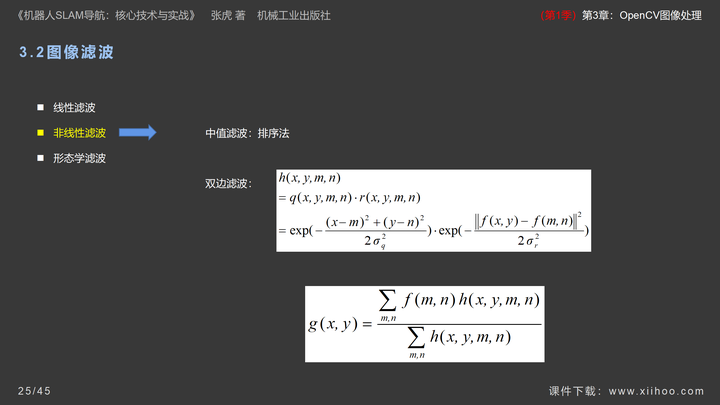
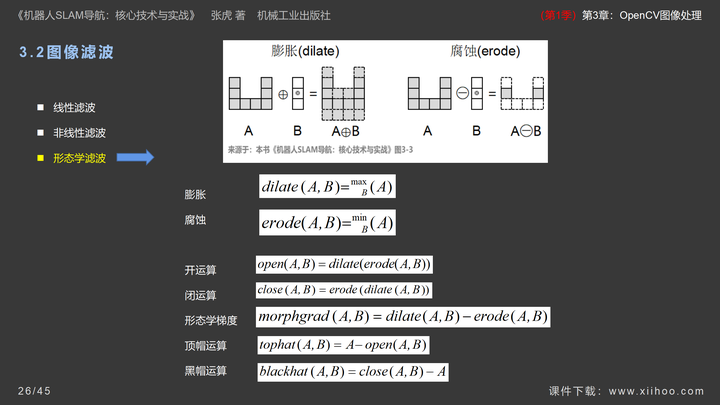
3.2 图像滤波
图像是由一个一个像素点组成的,处理图像就是处理这些像素点。
图像像素之间的关联性是重要的信息,不能完全把像素点割裂开来,这一点也正是众多图像算法的出发点。这里就通过图像滤波,来帮助大家具体理解像素之间的这种关联性。
图像滤波的目的是在尽量保留图像特征的条件下,过滤掉图像中的噪声,其滤波效果直接影响到后续图像识别、分析等算法的效果。
-
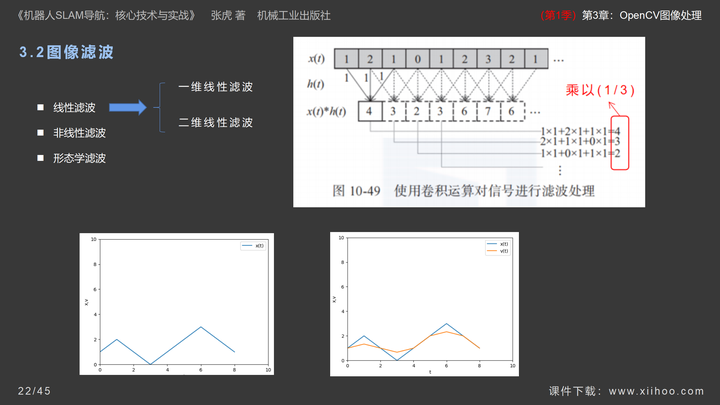
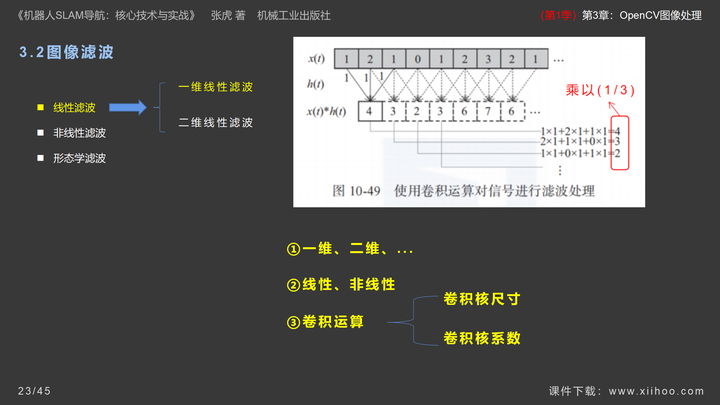
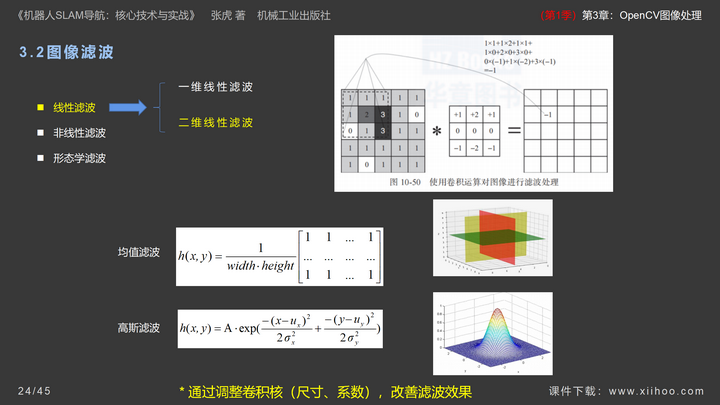
线性滤波
-
非线性滤波
-
形态学滤波

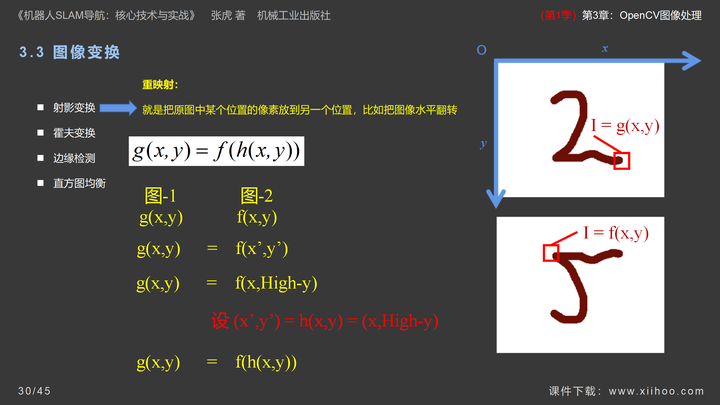
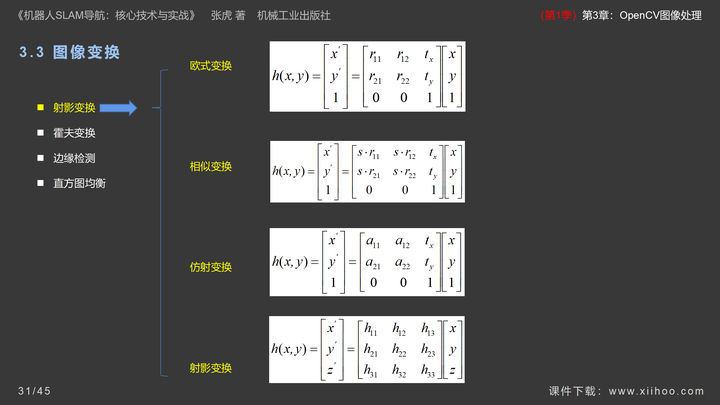
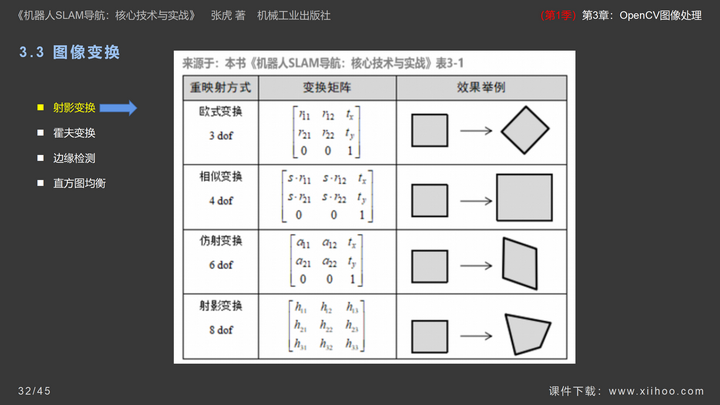
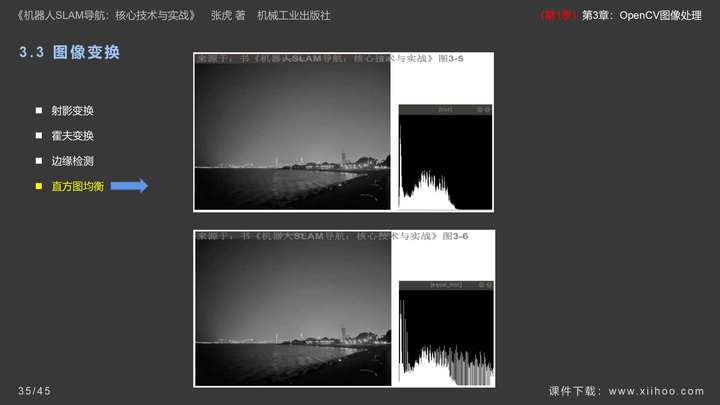
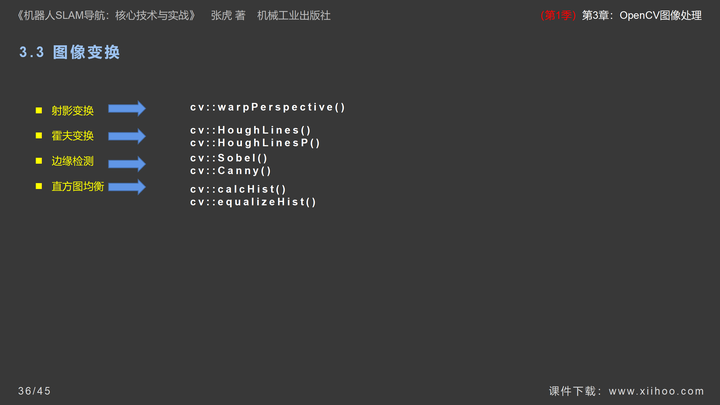
3.3 图像变换
经过3.2节图像滤波的学习,相信大家对图像处理有了一定的了解。不过,图像滤波只是很初级的处理,其目的是提升图像本身的质量。
本节要讲到的图像变换,从改变图像的结构入手,将图像变换成不同的形态。
由于篇幅限制,这里重点讨论在后续视觉SLAM章节中涉及到的一些图像变换算法。其他一些常用图像变换算法将略过,比如频谱变换、小波变换、图像金字塔等,感兴趣可以查阅相关资料。
-
射影变换
-
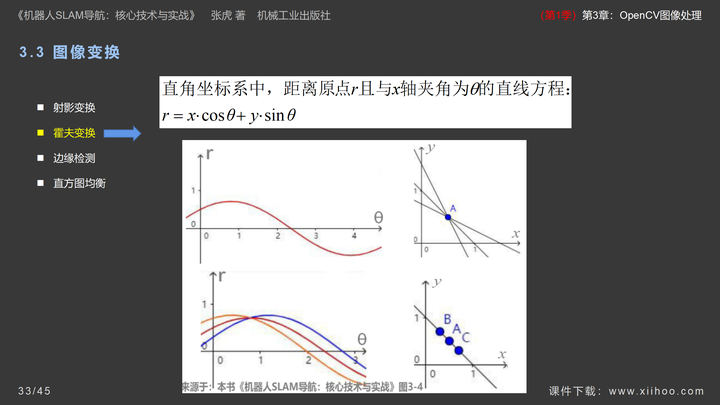
霍夫变换
-
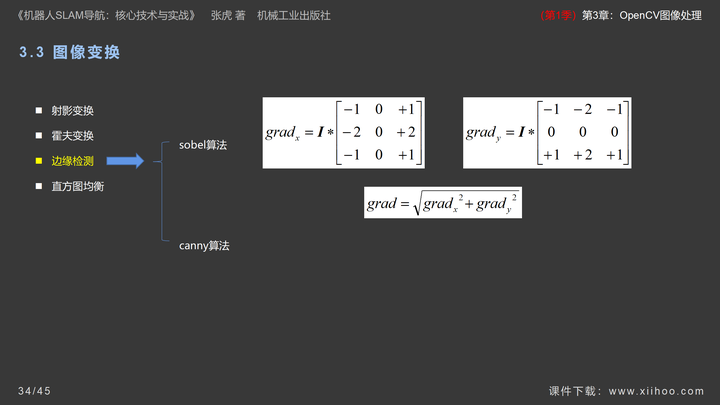
边缘检测
-
直方图均衡
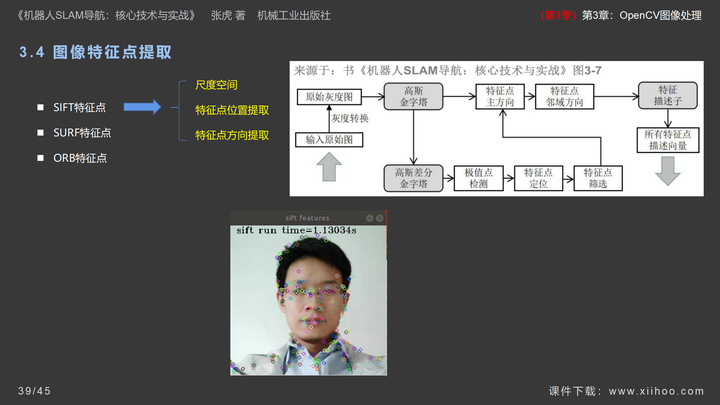
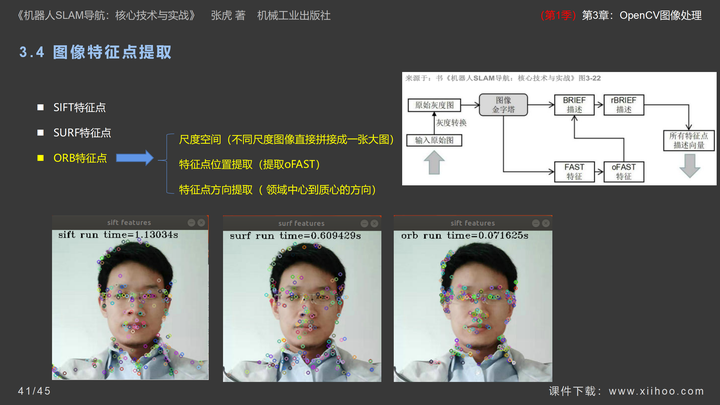
3.4 图像特征点提取
特征点提取算法能帮助计算机获取图像的区域特征信息,并应用于图像识别、图像匹配、三维重建、物体跟踪等领域。在实际工程中,具有很高的应用价值。
在图像领域,特征点(feature points)也常常被称为关键点(key points)或兴趣点(interest points)。
特征点的提取有多种算法,可以从图像纹理信息来提取,也可以通过图像区域灰度统计信息来提取,或者通过频谱变化、小波变换等变换后的特殊空间进行提取。
-
SIFT特征点
-
SURF特征点
-
ORB特征点


OpenCV图像处理与PCL点云处理

例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
-
PPT课件下载:
-
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· 单线程的Redis速度为什么快?