
《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式
《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式
视频讲解
第1季:第2章_C++编程范式
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

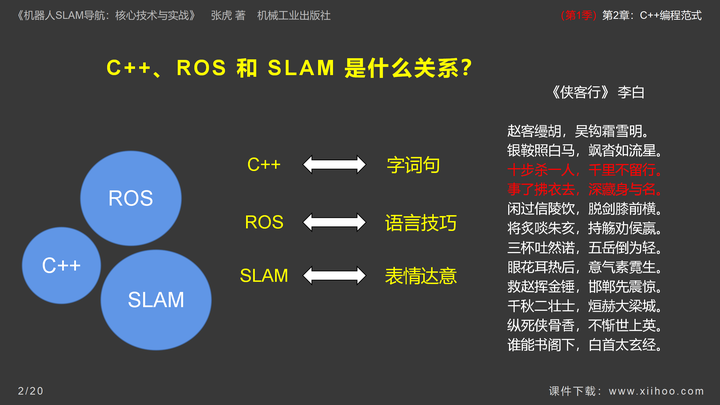
C++、ROS 和 SLAM 是什么关系?
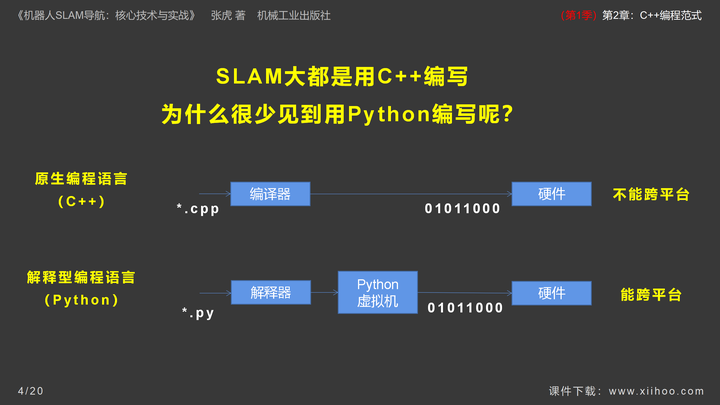
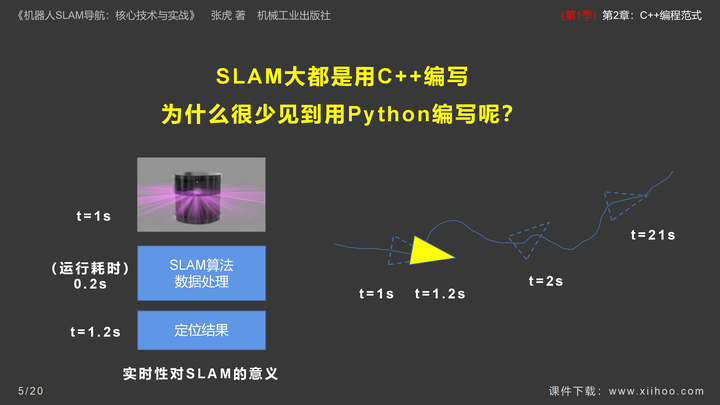
SLAM大都是用C++编写,为什么很少见到用Python编写呢?
实时性方面,C++要优于Python。
Python是对程序员友好的编程语言。
C++是对计算机友好的编程语言。
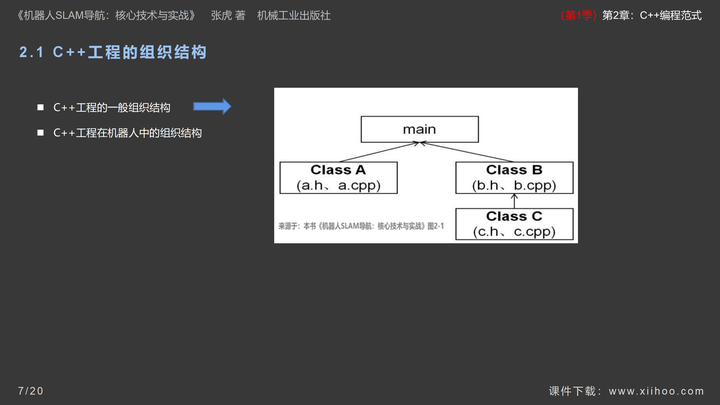
2.1 C++工程的组织结构
C++工程的一般组织结构
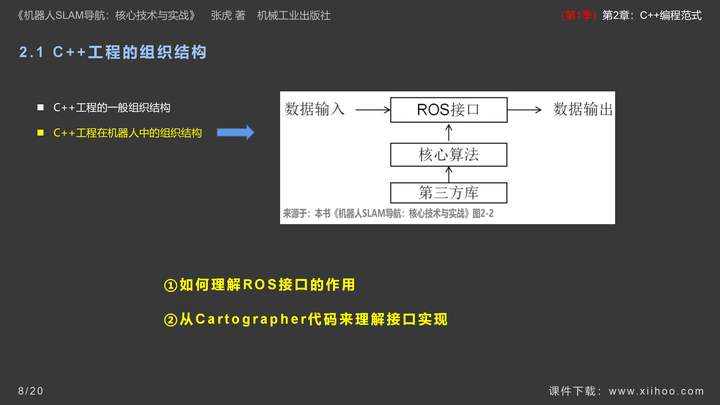
C++工程在机器人中的组织结构
①如何理解ROS接口的作用
②从Cartographer代码来理解接口实现
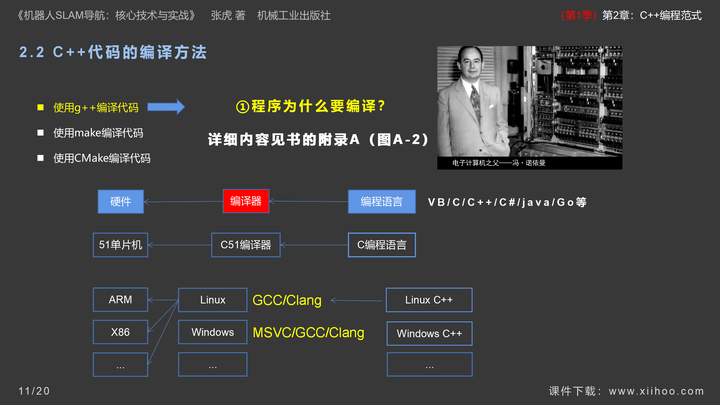
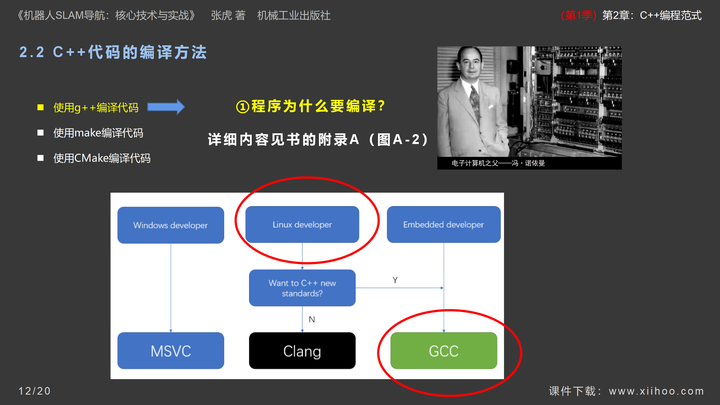
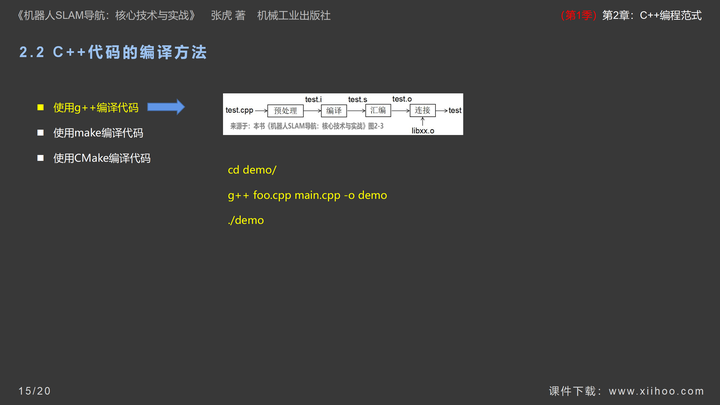
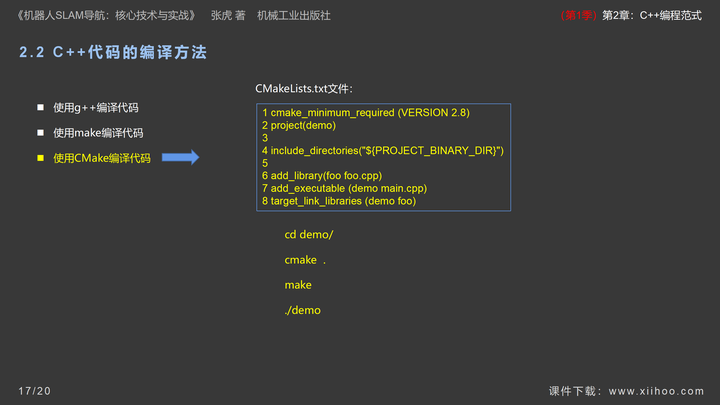
2.2 C++代码的编译方法
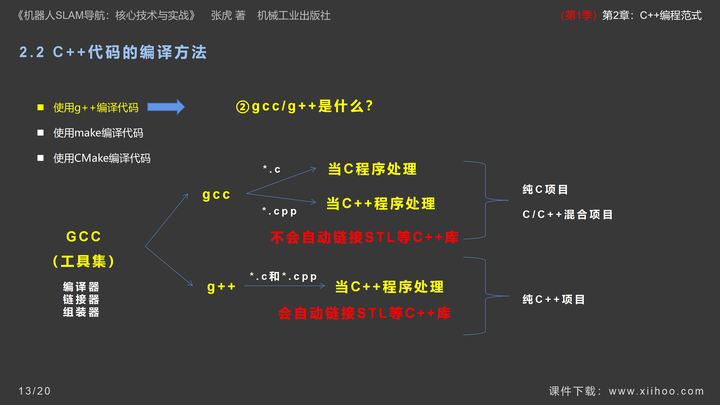
使用g++编译代码
使用make编译代码
使用CMake编译代码
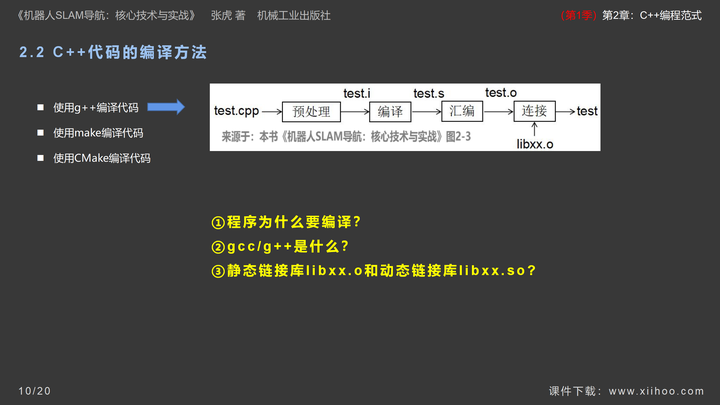
①程序为什么要编译?
MSVC/GCC/Clang
②gcc/g++是什么?
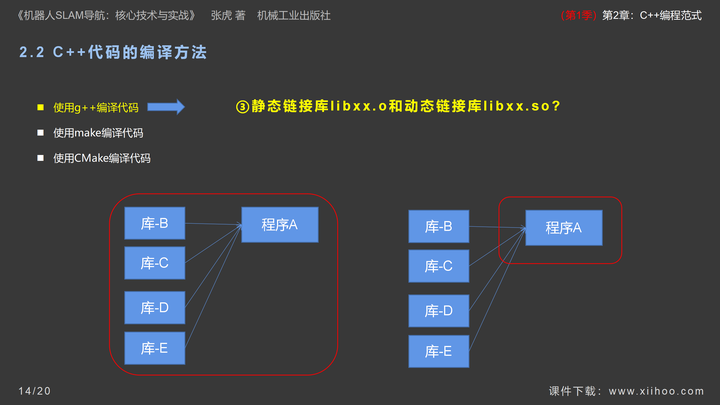
③静态链接库libxx.o和动态链接库libxx.so?

2.3 C++编程风格指南
头文件规范
作用域规范
类规范
命名约定
①规避低级错误
②提高团队开发效率
③便于维护升级
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
-
PPT课件下载:
-
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底

 浙公网安备 33010602011771号
浙公网安备 33010602011771号