


《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识
1.《机器人SLAM导航核心技术与实战》前言2.《机器人SLAM导航核心技术与实战》先导课:课程大纲3.《机器人SLAM导航核心技术与实战》先导课:如何安装Ubuntu系统4.《机器人SLAM导航核心技术与实战》先导课:SLAM的应用价值与技术难点5.《机器人SLAM导航核心技术与实战》第1季:第0章_SLAM发展综述
6.《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识
7.《机器人SLAM导航核心技术与实战》第1季:第2章_C++编程范式8.《机器人SLAM导航核心技术与实战》第1季:第3章_OpenCV图像处理9.《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器10.《机器人SLAM导航核心技术与实战》第1季:第5章_机器人主机11.《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘12.《机器人SLAM导航核心技术与实战》第1季:第7章_SLAM中的数学基础13.《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统14.《机器人SLAM导航核心技术与实战》第1季:第9章_视觉SLAM系统15.《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统《机器人SLAM导航核心技术与实战》第1季:第1章_ROS入门必备知识
视频讲解
第1季:第1章_ROS入门必备知识
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

-
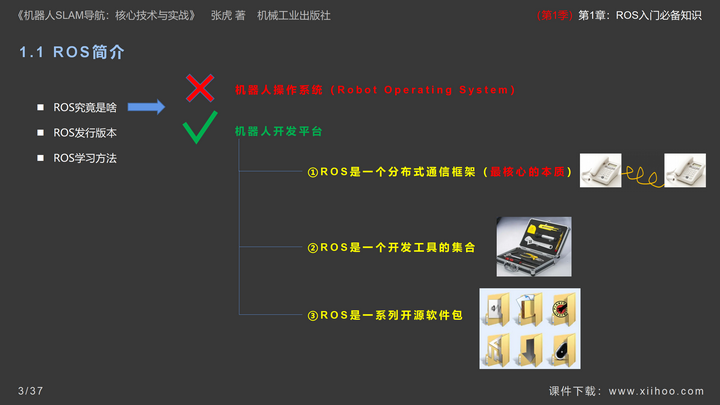
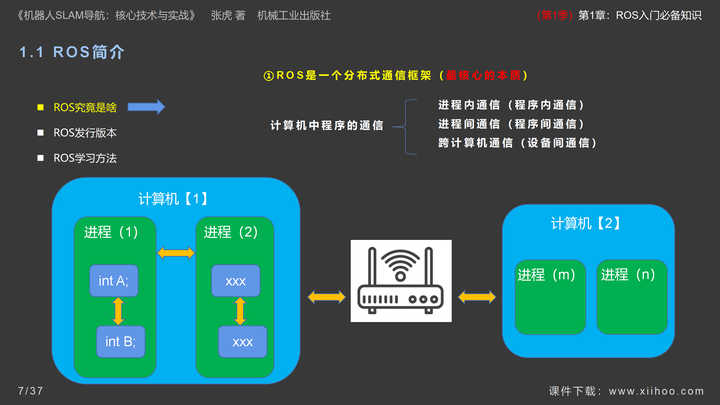
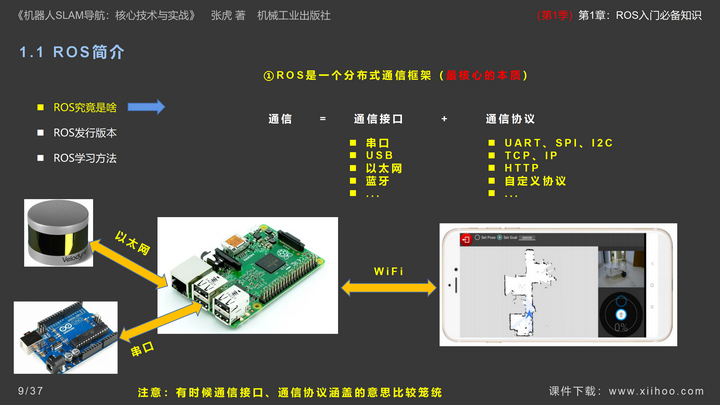
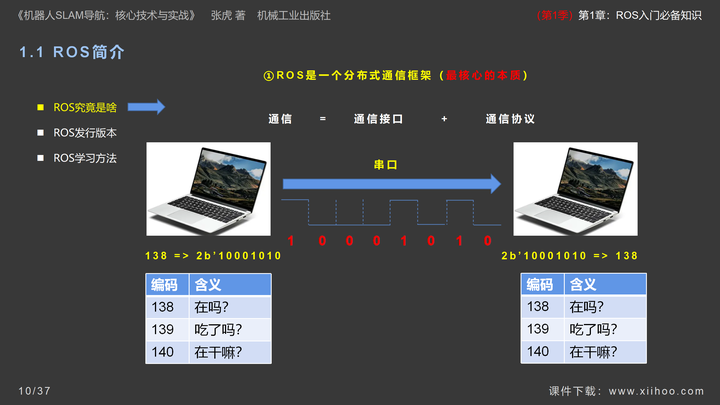
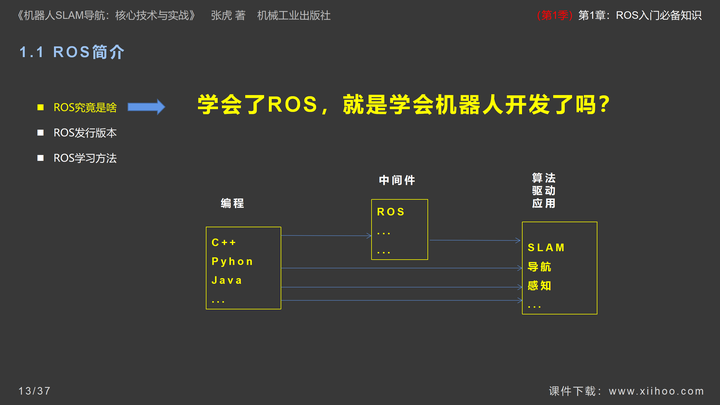
ROS究竟是啥
-
ROS发行版本
-
ROS学习方法
①ROS是一个分布式通信框架(最核心的本质)
②ROS是一个开发工具的集合
③ROS是一系列开源软件包








-
ROS安装
-
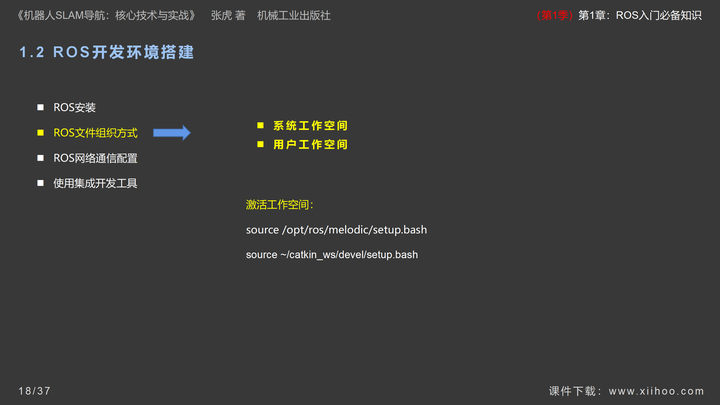
ROS文件组织方式
-
ROS网络通信配置
-
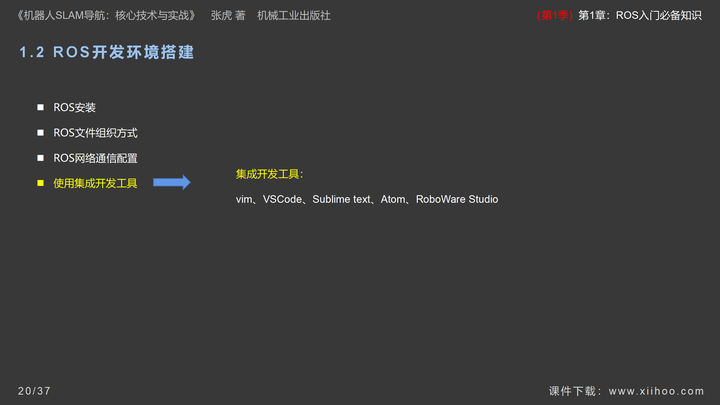
使用集成开发工具


-
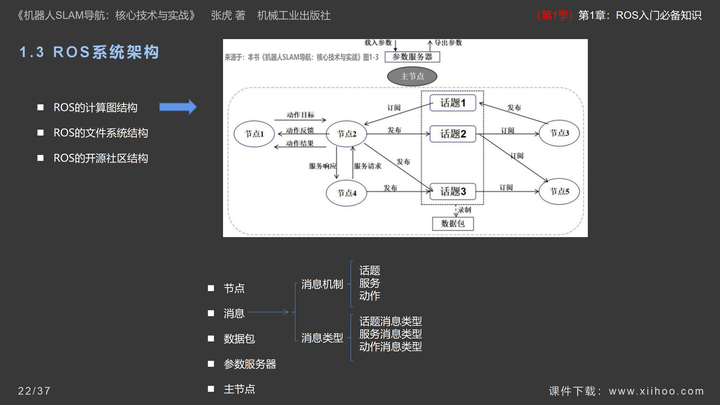
ROS的计算图结构
-
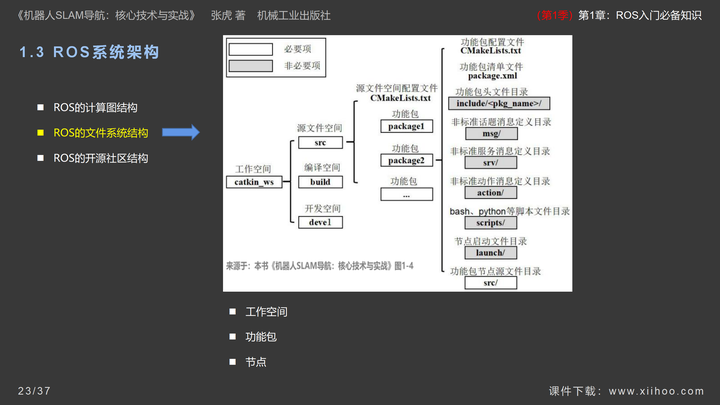
ROS的文件系统结构
-
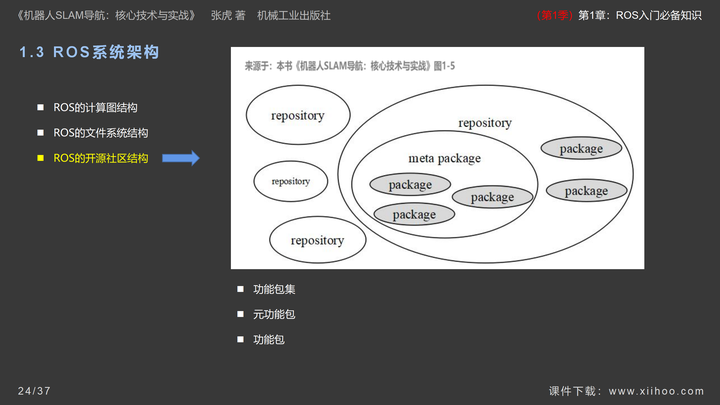
ROS的开源社区结构
-
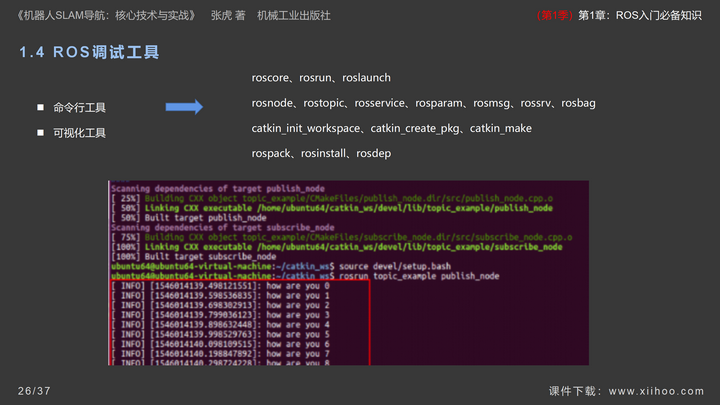
命令行工具
roscore、rosrun、roslaunch
rosnode、rostopic、rosservice、rosparam、rosmsg、rossrv、rosbag
catkin_init_workspace、catkin_create_pkg、catkin_make
rospack、rosinstall、rosdep
-
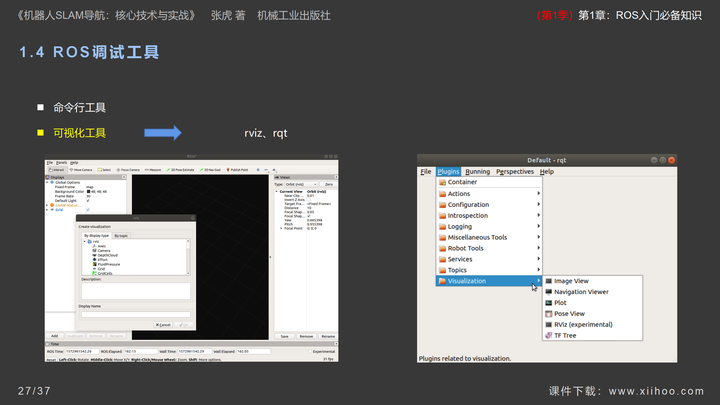
可视化工具
rviz、rqt
-
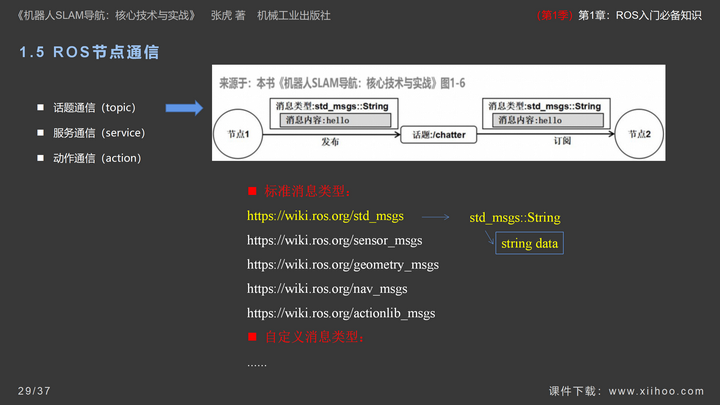
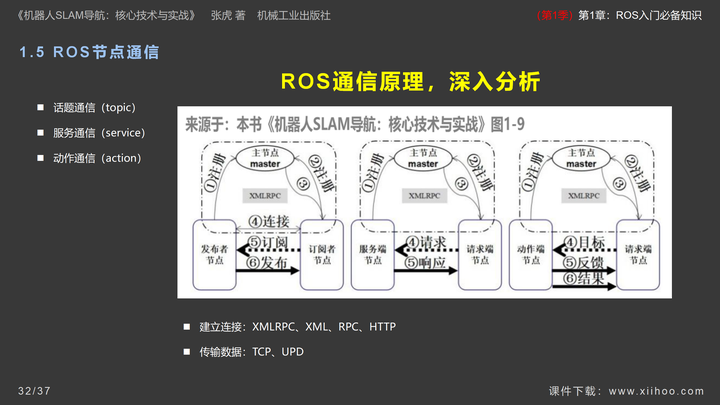
话题通信(topic)
-
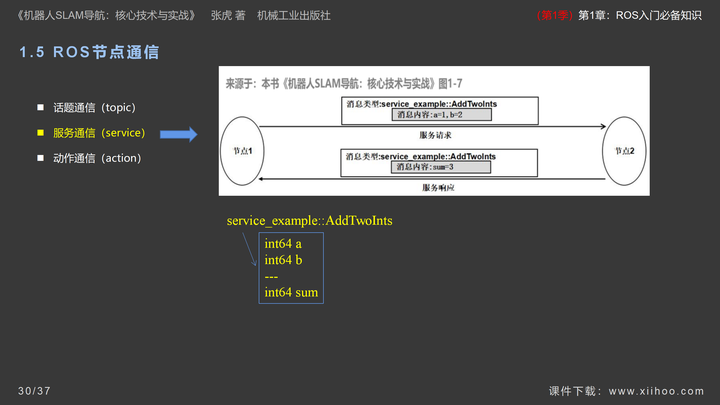
服务通信(service)
-
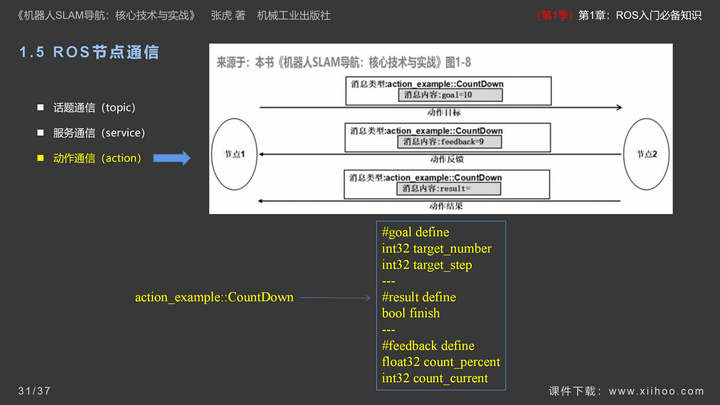
动作通信(action)
-
parameter
-
tf
-
urdf
-
launch
-
plugin
-
nodelet
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
-
PPT课件下载:
-
PDF课件下载:
本作品为”cnblogs@小虎哥哥爱学习"的原创文章,禁止任何形式的转载及抄录,侵权违法行为必究到底
合集:
机器人SLAM导航



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· AI与.NET技术实操系列(二):开始使用ML.NET
· 单线程的Redis速度为什么快?