

SLAM+语音机器人DIY系列:(二)ROS入门——8.理解roslaunch在大型项目中的作用
温馨提示
摘要
ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便。我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS基础知识进行详细的讲解,给不熟悉ROS的朋友起到一个抛砖引玉的作用。本章节主要内容:
8.理解roslaunch在大型项目中的作用
(1)roslaunch的作用
在一个大型的机器人项目中,经常涉及到多个node协同工作,并且每个node都有很多可设置的parameter。比如我们的机器人miiboo_nav导航项目,涉及到地图服务节点、定位算法节点、运动控制节点、底盘控制节点、激光雷达数据获取节点等众多节点,和几百个影响着这些node行为模式的parameter。如果全部手动rosrun逐个启动node并传入parameter,工程的复杂程度将难以想象。所以这个时候就需要用roslaunch来解决问题,将需要启动的节点和需要设置的parameter全部写入一个*.launch文件,然后用roslaunch一次性的启动*.launch文件,这样所有的节点就轻而易举的启动了。miiboo_nav导航项目的miiboo_nav.launch文件内容如图28。
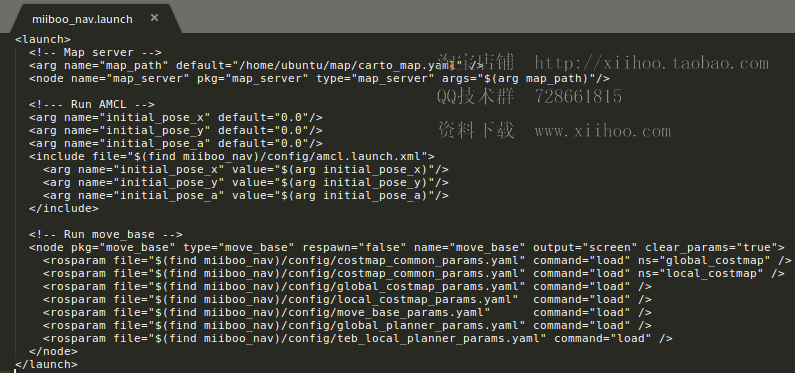
(图28)miiboo_nav导航项目的miiboo_nav.launch文件内容
(2)launch标签介绍
launch文件采用xml文本标记语言进行编写,对比较常用的标签进行介绍。
<launch>标签:
这个是顶层标签,所有的描述标签都要写在<launch></launch>之间。
<launch> ... </launch>
<node>标签:
这个是最常见的标签,每个node标签里包含了ROS图中节点的名称属性name、该节点所在的包名pkg、节点的类型type(type为可执行文件名称,如果节点用c++编写;type为*.py,如果节点用python编写)、调试属性output(如果output=“screen”,终端输出信息将被打印到当前控制台,而不是存入ROS日志文件)。
<node name=”xx” pkg=”xx” type=”xx” output=”xx”> ... </node>
<include>标签:
这个标签是用于导入另一个*.launch文件到当前文件。也就是说高层级的launch文件可以通过include的方法调用其它launch文件,这样可以使launch文件的组织方式更加模块化,便于移植与复用。
<include file=”$(find pkg_name)/launch/xx.launch”/>
<remap>标签:
这个标签是用于将topic的名称进行重映射, from中填入原来的topic名称,to中填入新的topic名称。<remap>标签根据放置在launch文件的层级不同,在相应的层级起作用。
<remap from=”orig_topic_name” to=”new_topic_name”/>
<param>标签:
这个标签用于在参数服务器中创建或设置一个指定名称的参数值。
<param name=”param_name” type=”xx” value=”xx”/>
<rosparam>标签:
这个标签用于从yaml文件中一次性导入大量参数到参数服务器中。
<rosparam command=”load” file=”$(find pkg_name)/path_to_file.yaml”/>
<arg>标签:
这个标签用于在launch文件中定义用于存储的临时变量,该标签定义的变量只在当前launch文件中使用。推荐使用第一种方式赋值,这样可以方便从命令行中传入参数。
<arg name=”xx” default=”xx”/> 或者 <arg name=”xx” value=”xx”/>
<group>标签:
这个标签用于将node批量划分到某个命名空间。便于大项目中节点的批量管理。

<group ns=”group_one”> < node ... /> < node ... /> </group> <group ns=”group_two”> < node ... /> < node ... /> </group>
(3)launch的使用方法
首先在相应功能包目录下新建一个launch文件夹。
然后在launch文件夹中新建*.launch文件,并按照上面的launch标签规则编写好launch文件的内容。
最后在终端中用roslaunch命令启动launch文件,命令如下:
cd ~/catkin_ws/ source devel/setup.bash roslaunch <pkg_name> <file_name.launch>
特别说明,由于roslaunch命令会自动去启动roscore,所以不需要像之前使用rosrun那样特意先去手动启动roscore。
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
参考文献
[1] 张虎,机器人SLAM导航核心技术与实战[M]. 机械工业出版社,2022.





【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App