
手把手教你搭建OpenScenario交通场景(上)
 经纬恒润动力学仿真软件ModelBase基于OpenScenario1.0标准,开发内嵌了场景编辑器,可用于对仿真测试过程中的车辆行驶道路模型之外,继续进行周边动态场景的搭建。
经纬恒润动力学仿真软件ModelBase基于OpenScenario1.0标准,开发内嵌了场景编辑器,可用于对仿真测试过程中的车辆行驶道路模型之外,继续进行周边动态场景的搭建。
OpenScenario是一种专为自动驾驶系统仿真测试设计的场景描述语言,它基于XML格式,旨在提供一个标准化、模块化的框架,用于定义和重现复杂的道路交通场景。该语言不仅能够详细描绘车辆、行人、交通信号及其他动态交通参与者的行为模式,还涵盖了环境条件(如天气、光照)和道路基础设施的设定,为自动驾驶系统的验证提供了丰富且逼真的测试环境。
与OpenDRIVE专注于静态道路网络建模不同,OpenScenario更多地聚焦于动态交通场景的构建,它允许开发者灵活设定车辆间的交互逻辑、事故触发条件、紧急避让情形等,以全面评估自动驾驶系统在各种极端或异常状况下的反应能力。通过OpenScenario,开发者能够创建从简单的直行、转弯测试到复杂的城市拥堵、高速公路超车、夜间行驶等多种场景,确保自动驾驶系统在面对真实世界复杂多变的交通环境时,能够做出安全、合理的决策。
经纬恒润动力学仿真软件ModelBase基于OpenScenario1.0标准,开发内嵌了场景编辑器,可用于对仿真测试过程中的车辆行驶道路模型之外,继续进行周边动态场景的搭建。从搭建的形式上,软件支持通过导入OpenScenario1.0格式文件来实现场景的自动复现,然后可利用场景编辑器在此基础上进行编辑修改,或是从零开始进行动态交通场景的创建。从两者的关系来看,交通场景依赖于道路模型存在,而在同一个道路模型下,可创建多个不同交通场景,并支持通过选择激活的形式进行待运行场景间的切换。当然,编辑后的交通场景也可以OpenScenario格式对外导出使用。
下面我们来一起看一下场景编辑器的功能和操作使用方法,场景编辑器的操作界面如下图所示。
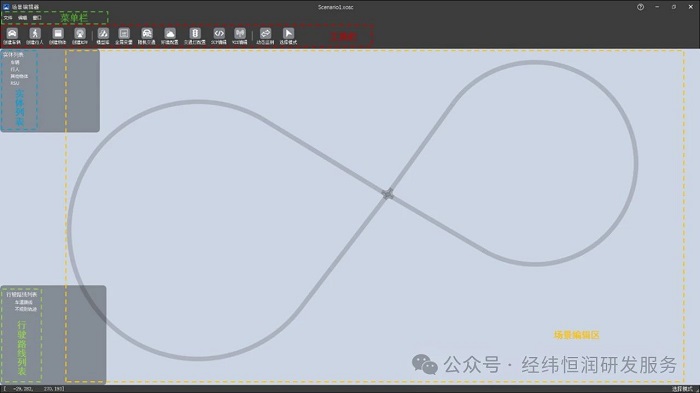
菜单栏
场景编辑器的菜单栏中包括文件、编辑和窗口三个选项,通过将鼠标放着在选项上将自动弹出其对应的下拉选项,然后可使用鼠标左键单击进行具体的功能选择,其中:
- 文件:用于对场景文件进行操作,包括新建、打开、保存和地址另存为
- 编辑:囊括了工具栏中的场景编辑工具,可在交通场景编辑过程中进行使用
- 窗口:用于管理编辑器布局中窗口的显示和关闭
工具栏
为便于用户在交通场景搭建过程中对编辑工具进行快速调用,编辑器将菜单栏--编辑中的工具显示在工具栏,通过鼠标左键单击可直接进行选择或切换,包括以下几个方面。
- 创建车辆
进入车辆模式,点击后的鼠标光标在编辑器内将变为蓝色小车图标,通过在道路中再次点击来进行放置,从而实现一个车辆实体的初步创建。创建完成后,界面中将自动弹出“车辆行为设置”对话框,可对车辆信息和行驶路线等初始状态进行预设,并以“触发条件+车辆行为”组合的形式对行驶过程中车辆的行为变化情况进行预设,其中需要重点关注的有:
① 在初始状态--车辆信息中,新增车辆默认为非主车(交通车),将自动生成命名并在编辑器界面中显示为蓝色;通过选择为主车以后,可通过“名称”下拉选项与工程中已创建的车辆动力学模型进行绑定,主车在编辑器界面中显示为黄色,以示与交通车之间的区别。
② 在初始状态--行驶路线中,选择“指定不规则轨迹”或“指定车道路线”模式前,需提前定义与之对应的“轨迹”或“路线”,之后可在下拉选项中进行选用。
③ 在触发条件及行为子界面中,可在车辆行为列表中创建一个或多个event,然后可以测试需求,对event的触发条件进行定义,并选择车辆在此阶段发生的横纵向行为变化。另外,也可以通过SCP指令作为一种特殊的行为定义形式,实现对车辆行为或交通场景变化的控制。
- 创建行人
进入行人模式,点击后的鼠标光标在编辑器内将变为人形图标,通过在道路中或路旁再次点击来进行放置,从而实现对一个行人实体的初步创建。创建完成后,界面中将自动弹出“行人行为设置”对话框,可对行人的位置、外观模型和初速度信息和行驶路线等初始状态进行预设,并以“触发条件+行人行为”组合的形式对不同触发条件下行人的行为变化情况进行预设。例如,可实现定义行人行走的不规则轨迹,然后将触发条件设置为相对于车辆位置进行触发,随后令其行走速度由无到有进行变更,由此可实现行人横穿道路这一交通场景的搭建。
- 创建物体
进入物体模式,点击后的鼠标光标在编辑器内将变为物体图标,通过在道路中或路旁再次点击来进行放置,从而实现对一个物体实体的初步创建。创建完成后,界面中将自动弹出“物体配置”对话框,可对物体的名称,外观(物体模型),放置位置和角度等进行设置。
通过对车辆、行人和物体模型进行选择,ModelBase支持令这些实体在动画界面中呈现出不同的外观样式,如下图所示。

- 创建RSU
进入RSU模式,点击后的鼠标光标在编辑器内将变为RSU图标,通过在道路中或路旁再次点击来进行放置,从而实现对一个RSU实体的初步创建。创建完成后,界面中将自动弹出“V2X信号配置”对话框,可用于对场景中车辆的OBU进行开启/关闭,或对RSU的基础参数和对外发送的事件信息等进行配置。RSU模块主要用于V2X仿真测试工况的搭建,上述V2X配置界面也可以通过工具栏中的“V2X编辑”按钮进行开启。
在完成上述行为设置后,可通过点击界面右下角的“确认”按钮进行关闭,当然,后续如需对实体再次进行修改设置,可通过鼠标左键双击界面中的实体标志重新打开配置界面。至此,创建实体的方法已介绍完毕,了解更多场景搭建教程,敬请关注《手把手教你搭建OpenScenario交通场景(下)》
ModelBase是经纬恒润自主研发的综合驾驶测试仿真软件,具备车辆动力学模型及智能驾驶场景仿真能力,可用于乘用车、商用车的整车电控系统、ADAS系统的设计、测试和验证。可以覆盖电控系统的整个开发周期,包括早期的算法仿真测试(MIL/SIL),控制器的硬件在环测试(HIL),半实物台架测试(如电机台架、动力系统台架、整车台架等),以及车辆在环测试(VIL)。
ModelBase 软件可免费申请试用,只需要发送【姓名、联系电话、邮箱、公司 / 学校名称、部门 / 院系、申请版本(动力学版本 / 智能驾驶版本)】信息到 market_dept@hirain.com 即可。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号