d2l-GRU-LSTM
1. 门控循环单元 GRU
GRU和RNN的区别:
- GRU支持对隐状态的门控。模型有专门的机制来决定何时更新隐状态,何时重置隐状态
- GRU的数值稳定性更强,能够处理更长的文本
- GRU的功能是LSTM的变种,两者功能类似
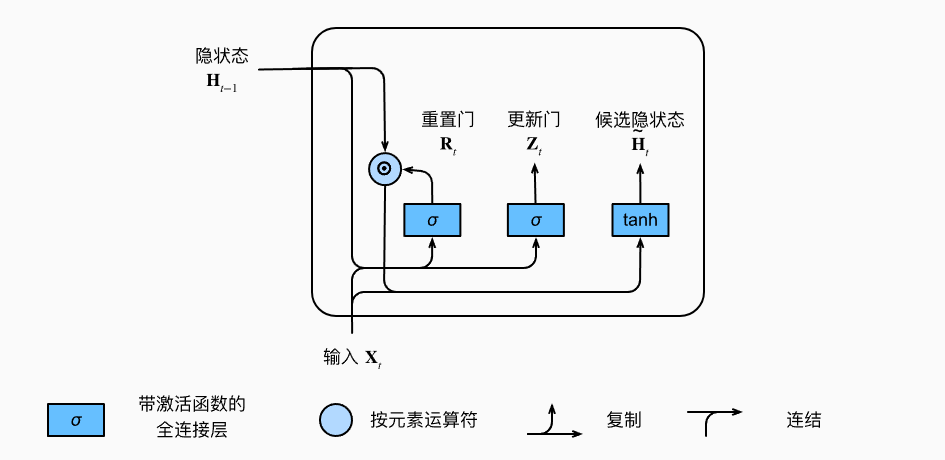
重置门 (reset gate),更新门 (update gate):这两个门和隐状态的形状相同,因此GRU的可学习参数是RNN的3倍。

其中,
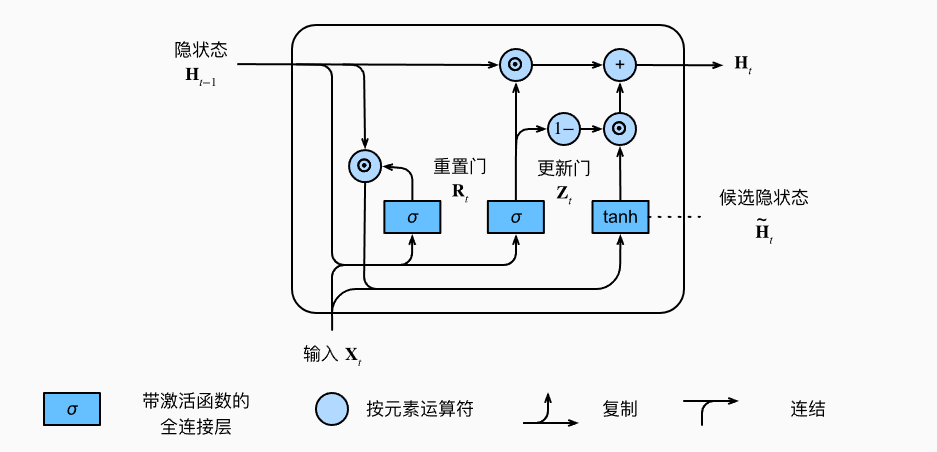
候选隐状态 (candidate hidden state):由重置门
其中,
隐状态
# Pytorch 简洁实现
num_inputs = vocab_size
gru_layer = nn.GRU(num_inputs, num_hiddens)
model = d2l.RNNModel(gru_layer, len(vocab))
model = model.to(device)
d2l.train_ch8(model, train_iter, vocab, lr, num_epochs, device)
综上所述:
- 重置门有助于模型捕获序列中的短期依赖关系
- 更新门有助于模型捕获序列中的长期依赖关系
2. 长短期记忆网络 LSTM
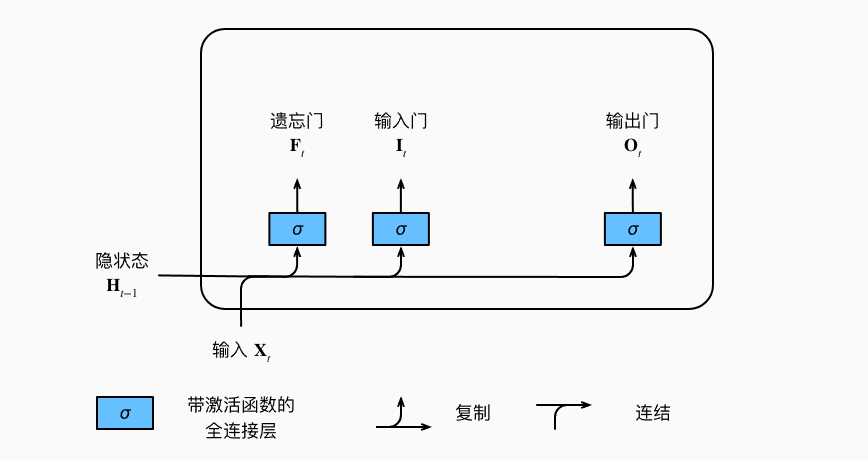
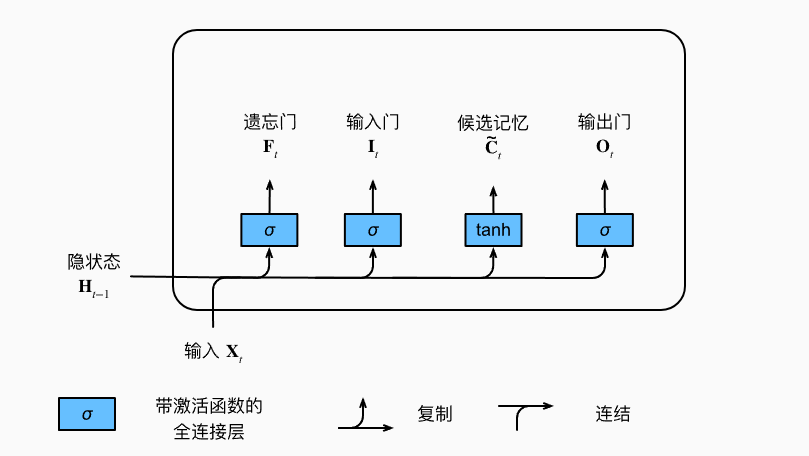
LSTM中有3种门:遗忘门 F,输入门 I,输出门 O
其中,
候选记忆元
记忆元
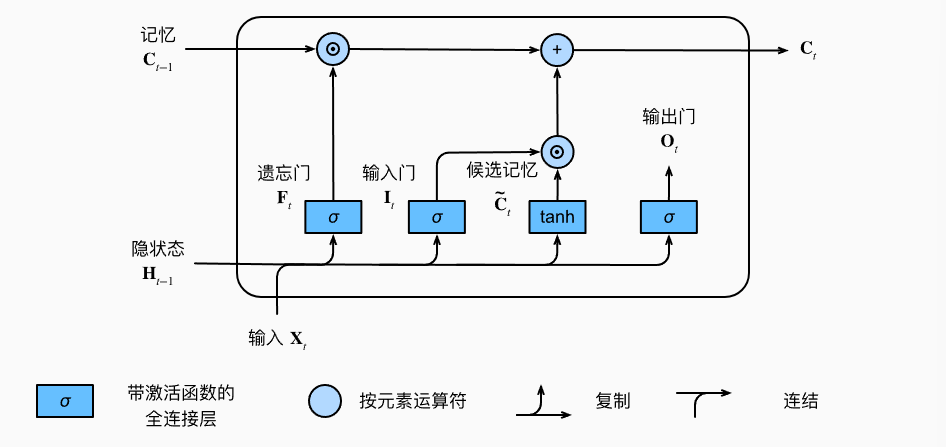
- 遗忘门
- 输入门
隐状态
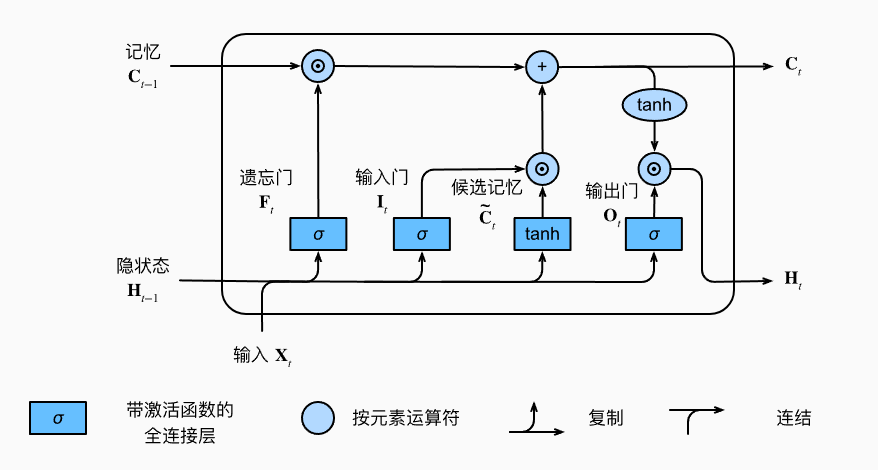
- tanh函数保证了
- 输出门
- 输出门
综上所述:
- LSTM中有3种门:遗忘门、输入门、输出门
- LSTM的隐藏层输出包括:
- 隐状态H:会传递到输出层
- 记忆元C:属于内部信息


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律