2020/2/8
元宵节快乐呀!
今日学习
ML继续补代码 3h
图像处理那本书继续看 3h
搜索和项目有关的东西 3h
代码地址
代码地址
图像处理笔记

边缘检测( Edge detection)
一阶边缘检测算子(First-order edge-detection operators)
基本算子
Edge detection highlights image contrast. Detecting contrast, which is difference in intensity, can emphasize the boundaries of features within an
image, since this is where image contrast occurs.
prewwit算子
This gives two results: the rate of change of brightness along each axis.
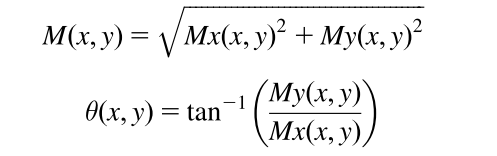
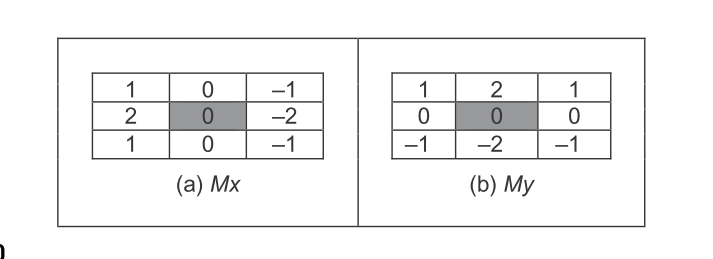
Sobel
Canny

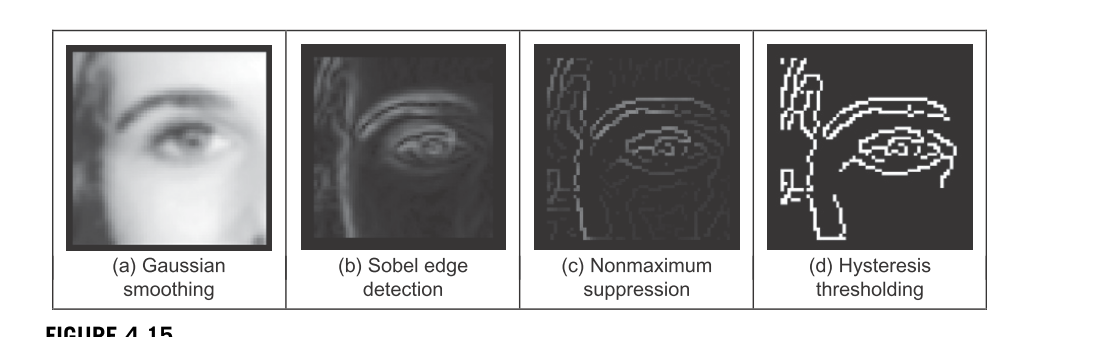
Nonmaximum suppression(非极大值抑制) essentially locates the highest points in the edgemagnitude data.
The action of nonmaximum suppression is to select the points along the top of the ridge.
Hysteresis thresholding(滞后阈值处理) requires two thresholds, an upper and a lower threshold.

Hysteresis thresholding therefore has an ability to detect major features of interest in the edge image, in an improved manner to uniform thresholding.(均一阈值处理)
二阶边缘检测算子
Laplacian算子
When the horizontal second-order operator is combined with a vertical second-order difference we obtain the full Laplacian template
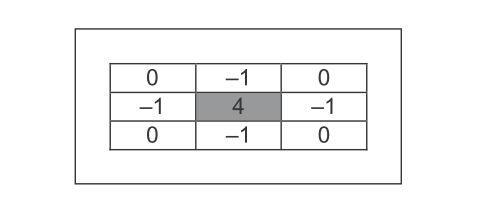
One advantage of the Laplacian operator is that it is isotropic (like the Gaussian operator): it has the same properties in each direction. However, as yet it contains no smoothing and will again respond to noise, more so than a first-order operator(一阶算子) since it is differentiation of a higher order. As such, the Laplacian operator is rarely used in its basic form.A clear disadvantage with the Laplacian operator is that edge direction is not available.
Marr-Hildreth算子 | LOG算子
相位一致性(Phase congruency)
Phase congruency is a feature detector with two main advantages: it can detect a broad range of features and it is invariant to local (and smooth) change in illumination.
定位特征提取
定位特征提取
peaks of local curvature are corners(角点)
Feature Extraction
Moravec Harris 检测器
A measure of curvature can be obtained by considering changes along a particular direction in the image P itself. This is the basic idea of Moravec’s corner detection operator.This operator computes the average change in image intensity when a window is shifted in several directions.
First, if the pixel is in an edge, then defining a straight line, \(E_{u,v}(x, y)\), is small for a shift along the edge and large for a shift perpendicular to the edge. In this case, we should choose the small value since the curvature of the edge is small. Secondly, if the edge defines a corner, then all the shifts produce a large value. Thus, if we also chose the minimum, this value indicates high curvature.
尺度不变特征(SIFT, Scale invariant feature transform)
The SIFT transform actually involves two stages: feature extraction and description.
Low-level feature extraction within the SIFT approach selects salient features in a manner invariant to image scale (feature size) and rotation and with partial invariance to change in illumination. Further, the formulation reduces the probability of poor extraction due to occlusion clutter and noise.
加速鲁棒特征(SURF)
The central property exploited within SIFT is the use of difference of Gaussians to determine local features.
This shows that SURF can deliver fewer features, and which persist (and hence can be faster), whereas SIFT can provide more features (and be slower)
显著性算子
OpenCV—python 图像显著性检测算法—HC/RC/LC/FT
描述图像运动
基于区域的方法
The displacement corresponds to the projection of movement of the objects in the scene and it is referred to as the optical flow.(光流)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号