

Canny边缘检测
Canny边缘检测算法一直是边缘检测的经典算法。下面详细介绍Canny边缘检测算法的原理以及编程实现。
Canny边缘检测基本原理:
(1)图象边缘检测必须满足两个条件:一能有效地抑制噪声;二必须尽量精确确定边缘的位置。
(2)根据对信噪比与定位乘积进行测度,得到最优化逼近算子。这就是Canny边缘检测算子。
(3)类似与Marr(LoG)边缘检测方法,也属于先平滑后求导数的方法。
Canny 的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:
(1)好的检测 - 算法能够尽可能多地标识出图像中的实际边缘。
(2)好的定位 - 标识出的边缘要尽可能与实际图像中的实际边缘尽可能接近。
(3)最小响应 - 图像中的边缘只能标识一次,并且可能存在的图像雜訊不应标识为边缘。
Canny边缘检测算法的步骤:
(1)去噪
任何边缘检测算法都不可能在未经处理的原始数据上很好地處理,所以第一步是对原始数据与高斯 mask 作卷积,得到的图像与原始图像相比有些轻微的模糊(blurred)。这样,单独的一个像素雜訊在经过高斯平滑的图像上变得几乎没有影响。
(2)用一阶偏导的有限差分来计算梯度的幅值和方向。
(3)对梯度幅值进行非极大值抑制。
仅仅得到全局的梯度并不足以确定边缘,因此为确定边缘,必须保留局部梯度最大的点,而抑制非极大值。(non-maxima suppression,NMS)
解决方法:利用梯度的方向。

四个扇区的标号为0到3,对应3*3邻域的四种可能组合。在每一点上,邻域的中心象素M与沿着梯度线的两个象素相比。如果M的梯度值不比沿梯度线的两个相邻象素梯度值大,则令M=0。
(4)用双阈值算法检测和连接边缘。
减少假边缘段数量的典型方法是对N[i,j]使用一个阈值。将低于阈值的所有值赋零值。但问题是如何选取阈值?
解决方法:双阈值算法。双阈值算法对非极大值抑制图象作用两个阈值τ1和τ2,且2τ1≈τ2,从而可以得到两个阈值边缘图象N1[i,j]和N2[i,j]。由于N2[i,j]使用高阈值得到,因而含有很少的假边缘,但有间断(不闭合)。双阈值法要在N2[i,j]中把边缘连接成轮廓,当到达轮廓的端点时,该算法就在N1[i,j]的8邻点位置寻找可以连接到轮廓上的边缘,这样,算法不断地在N1[i,j]中收集边缘,直到将N2[i,j]连接起来为止。
在连接边缘的时候,用数组模拟队列的实现。以进行8-连通域搜索。
更详细的资料请参考维基百科:http://zh.wikipedia.org/wiki/Canny%E7%AE%97%E5%AD%90
下面是我编程实现的Canny边缘检测代码,如有错误,请大家包涵、指正:
- I = imread('rice.png');
- I = double(I);
- [height,width] = size(I);
- J = I;
- conv = zeros(5,5);%高斯卷积核
- sigma = 1;%方差
- sigma_2 = sigma * sigma;%临时变量
- sum = 0;
- for i = 1:5
- for j = 1:5
- conv(i,j) = exp((-(i - 3) * (i - 3) - (j - 3) * (j - 3)) / (2 * sigma_2)) / (2 * 3.14 * sigma_2);%高斯公式
- sum = sum + conv(i,j);
- end
- end
- conv = conv./sum;%标准化
- %对图像实施高斯滤波
- for i = 1:height
- for j = 1:width
- sum = 0;%临时变量
- for k = 1:5
- for m = 1:5
- if (i - 3 + k) > 0 && (i - 3 + k) <= height && (j - 3 + m) > 0 && (j - 3 + m) < width
- sum = sum + conv(k,m) * I(i - 3 + k,j - 3 + m);
- end
- end
- end
- J(i,j) = sum;
- end
- end
- figure,imshow(J,[])
- title('高斯滤波后的结果')
- %求梯度
- dx = zeros(height,width);%x方向梯度
- dy = zeros(height,width);%y方向梯度
- d = zeros(height,width);
- for i = 1:height - 1
- for j = 1:width - 1
- dx(i,j) = J(i,j + 1) - J(i,j);
- dy(i,j) = J(i + 1,j) - J(i,j);
- d(i,j) = sqrt(dx(i,j) * dx(i,j) + dy(i,j) * dy(i,j));
- end
- end
- figure,imshow(d,[])
- title('求梯度后的结果')
- %局部非极大值抑制
- K = d;%记录进行非极大值抑制后的梯度
- %设置图像边缘为不可能的边缘点
- for j = 1:width
- K(1,j) = 0;
- end
- for j = 1:width
- K(height,j) = 0;
- end
- for i = 2:width - 1
- K(i,1) = 0;
- end
- for i = 2:width - 1
- K(i,width) = 0;
- end
- for i = 2:height - 1
- for j = 2:width - 1
- %当前像素点的梯度值为0,则一定不是边缘点
- if d(i,j) == 0
- K(i,j) = 0;
- else
- gradX = dx(i,j);%当前点x方向导数
- gradY = dy(i,j);%当前点y方向导数
- gradTemp = d(i,j);%当前点梯度
- %如果Y方向幅度值较大
- if abs(gradY) > abs(gradX)
- weight = abs(gradX) / abs(gradY);%权重
- grad2 = d(i - 1,j);
- grad4 = d(i + 1,j);
- %如果x、y方向导数符号相同
- %像素点位置关系
- %g1 g2
- % C
- % g4 g3
- if gradX * gradY > 0
- grad1 = d(i - 1,j - 1);
- grad3 = d(i + 1,j + 1);
- else
- %如果x、y方向导数符号反
- %像素点位置关系
- % g2 g1
- % C
- %g3 g4
- grad1 = d(i - 1,j + 1);
- grad3 = d(i + 1,j - 1);
- end
- %如果X方向幅度值较大
- else
- weight = abs(gradY) / abs(gradX);%权重
- grad2 = d(i,j - 1);
- grad4 = d(i,j + 1);
- %如果x、y方向导数符号相同
- %像素点位置关系
- %g3
- %g4 C g2
- % g1
- if gradX * gradY > 0
- grad1 = d(i + 1,j + 1);
- grad3 = d(i - 1,j - 1);
- else
- %如果x、y方向导数符号反
- %像素点位置关系
- % g1
- %g4 C g2
- %g3
- grad1 = d(i - 1,j + 1);
- grad3 = d(i + 1,j - 1);
- end
- end
- %利用grad1-grad4对梯度进行插值
- gradTemp1 = weight * grad1 + (1 - weight) * grad2;
- gradTemp2 = weight * grad3 + (1 - weight) * grad4;
- %当前像素的梯度是局部的最大值,可能是边缘点
- if gradTemp >= gradTemp1 && gradTemp >= gradTemp2
- K(i,j) = gradTemp;
- else
- %不可能是边缘点
- K(i,j) = 0;
- end
- end
- end
- end
- figure,imshow(K,[])
- title('非极大值抑制后的结果')
- %定义双阈值:EP_MIN、EP_MAX,且EP_MAX = 2 * EP_MIN
- EP_MIN = 12;
- EP_MAX = EP_MIN * 2;
- EdgeLarge = zeros(height,width);%记录真边缘
- EdgeBetween = zeros(height,width);%记录可能的边缘点
- for i = 1:height
- for j = 1:width
- if K(i,j) >= EP_MAX%小于小阈值,不可能为边缘点
- EdgeLarge(i,j) = K(i,j);
- else if K(i,j) >= EP_MIN
- EdgeBetween(i,j) = K(i,j);
- end
- end
- end
- end
- %把EdgeLarge的边缘连成连续的轮廓
- MAXSIZE = 999999;
- Queue = zeros(MAXSIZE,2);%用数组模拟队列
- front = 1;%队头
- rear = 1;%队尾
- edge = zeros(height,width);
- for i = 1:height
- for j = 1:width
- if EdgeLarge(i,j) > 0
- %强点入队
- Queue(rear,1) = i;
- Queue(rear,2) = j;
- rear = rear + 1;
- edge(i,j) = EdgeLarge(i,j);
- EdgeLarge(i,j) = 0;%避免重复计算
- end
- while front ~= rear%队不空
- %队头出队
- temp_i = Queue(front,1);
- temp_j = Queue(front,2);
- front = front + 1;
- %8-连通域寻找可能的边缘点
- %左上方
- if EdgeBetween(temp_i - 1,temp_j - 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i - 1,temp_j - 1) = K(temp_i - 1,temp_j - 1);
- EdgeBetween(temp_i - 1,temp_j - 1) = 0;%避免重复计算
- %入队
- Queue(rear,1) = temp_i - 1;
- Queue(rear,2) = temp_j - 1;
- rear = rear + 1;
- end
- %正上方
- if EdgeBetween(temp_i - 1,temp_j) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i - 1,temp_j) = K(temp_i - 1,temp_j);
- EdgeBetween(temp_i - 1,temp_j) = 0;
- %入队
- Queue(rear,1) = temp_i - 1;
- Queue(rear,2) = temp_j;
- rear = rear + 1;
- end
- %右上方
- if EdgeBetween(temp_i - 1,temp_j + 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i - 1,temp_j + 1) = K(temp_i - 1,temp_j + 1);
- EdgeBetween(temp_i - 1,temp_j + 1) = 0;
- %入队
- Queue(rear,1) = temp_i - 1;
- Queue(rear,2) = temp_j + 1;
- rear = rear + 1;
- end
- %正左方
- if EdgeBetween(temp_i,temp_j - 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i,temp_j - 1) = K(temp_i,temp_j - 1);
- EdgeBetween(temp_i,temp_j - 1) = 0;
- %入队
- Queue(rear,1) = temp_i;
- Queue(rear,2) = temp_j - 1;
- rear = rear + 1;
- end
- %正右方
- if EdgeBetween(temp_i,temp_j + 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i,temp_j + 1) = K(temp_i,temp_j + 1);
- EdgeBetween(temp_i,temp_j + 1) = 0;
- %入队
- Queue(rear,1) = temp_i;
- Queue(rear,2) = temp_j + 1;
- rear = rear + 1;
- end
- %左下方
- if EdgeBetween(temp_i + 1,temp_j - 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i + 1,temp_j - 1) = K(temp_i + 1,temp_j - 1);
- EdgeBetween(temp_i + 1,temp_j - 1) = 0;
- %入队
- Queue(rear,1) = temp_i + 1;
- Queue(rear,2) = temp_j - 1;
- rear = rear + 1;
- end
- %正下方
- if EdgeBetween(temp_i + 1,temp_j) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i + 1,temp_j) = K(temp_i + 1,temp_j);
- EdgeBetween(temp_i + 1,temp_j) = 0;
- %入队
- Queue(rear,1) = temp_i + 1;
- Queue(rear,2) = temp_j;
- rear = rear + 1;
- end
- %右下方
- if EdgeBetween(temp_i + 1,temp_j + 1) > 0%把在强点周围的弱点变为强点
- EdgeLarge(temp_i + 1,temp_j + 1) = K(temp_i + 1,temp_j + 1);
- EdgeBetween(temp_i + 1,temp_j + 1) = 0;
- %入队
- Queue(rear,1) = temp_i + 1;
- Queue(rear,2) = temp_j + 1;
- rear = rear + 1;
- end
- end
- %下面2行用于观察程序运行的状况
- i
- j
- end
- end
- figure,imshow(edge,[])
- title('双阈值后的结果')
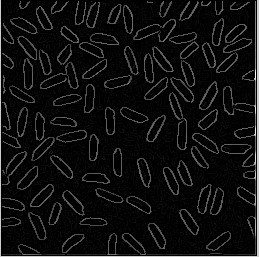
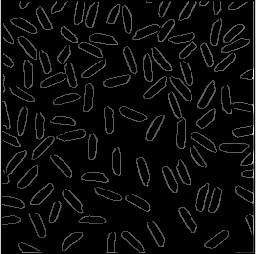
对图片rice.png进行处理后的结果如下:

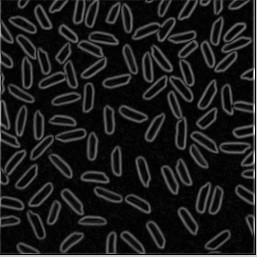
canny边缘检测一共四个部分:
1.对原图像高斯平滑
2.对高斯平滑后的图像进行sobel边缘检测。这里需要求横的和竖的还有联合的,所以一共三个需要sobel边缘检测图像。
3.对联合的sobel检测图像进行非极大抑制
4.连接边缘点并进行滞后阈值处理。
下面是代码:
main.m

clear all;
close all;
clc;
img=imread('lena.jpg');
imshow(img);
[m n]=size(img);
img=double(img);
%%canny边缘检测的前两步相对不复杂,所以我就直接调用系统函数了
%%高斯滤波
w=fspecial('gaussian',[5 5]);
img=imfilter(img,w,'replicate');
figure;
imshow(uint8(img))
%%sobel边缘检测
w=fspecial('sobel');
img_w=imfilter(img,w,'replicate'); %求横边缘
w=w';
img_h=imfilter(img,w,'replicate'); %求竖边缘
img=sqrt(img_w.^2+img_h.^2); %注意这里不是简单的求平均,而是平方和在开方。我曾经好长一段时间都搞错了
figure;
imshow(uint8(img))
%%下面是非极大抑制
new_edge=zeros(m,n);
for i=2:m-1
for j=2:n-1
Mx=img_w(i,j);
My=img_h(i,j);
if My~=0
o=atan(Mx/My); %边缘的法线弧度
elseif My==0 && Mx>0
o=pi/2;
else
o=-pi/2;
end
%Mx处用My和img进行插值
adds=get_coords(o); %边缘像素法线一侧求得的两点坐标,插值需要
M1=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %插值后得到的像素,用此像素和当前像素比较
adds=get_coords(o+pi); %边缘法线另一侧求得的两点坐标,插值需要
M2=My*img(i+adds(2),j+adds(1))+(Mx-My)*img(i+adds(4),j+adds(3)); %另一侧插值得到的像素,同样和当前像素比较
isbigger=(Mx*img(i,j)>M1)*(Mx*img(i,j)>=M2)+(Mx*img(i,j)<M1)*(Mx*img(i,j)<=M2); %如果当前点比两边点都大置1
if isbigger
new_edge(i,j)=img(i,j);
end
end
end
figure;
imshow(uint8(new_edge))
%%下面是滞后阈值处理
up=120; %上阈值
low=100; %下阈值
set(0,'RecursionLimit',10000); %设置最大递归深度
for i=1:m
for j=1:n
if new_edge(i,j)>up &&new_edge(i,j)~=255 %判断上阈值
new_edge(i,j)=255;
new_edge=connect(new_edge,i,j,low);
end
end
end
figure;
imshow(new_edge==255)
get_coords.m
function re=get_coords(angle) %angle是边缘法线角度,返回法线前后两点
sigma=0.000000001;
x1=ceil(cos(angle+pi/8)*sqrt(2)-0.5-sigma);
y1=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);
x2=ceil(cos(angle-pi/8)*sqrt(2)-0.5-sigma);
y2=ceil(-sin(angle-pi/8)*sqrt(2)-0.5-sigma);
re=[x1 y1 x2 y2];
end
connect.m
function nedge=connect(nedge,y,x,low) %种子定位后的连通分析
neighbour=[-1 -1;-1 0;-1 1;0 -1;0 1;1 -1;1 0;1 1]; %八连通搜寻
[m n]=size(nedge);
for k=1:8
yy=y+neighbour(k,1);
xx=x+neighbour(k,2);
if yy>=1 &&yy<=m &&xx>=1 && xx<=n
if nedge(yy,xx)>=low && nedge(yy,xx)~=255 %判断下阈值
nedge(yy,xx)=255;
nedge=connect(nedge,yy,xx,low);
end
end
end
end
每步运行效果:
 原图
原图
 高斯模糊后
高斯模糊后
 sobel边缘检测后
sobel边缘检测后
 非极大抑制后
非极大抑制后
 上阈值120,下阈值100检测结果。
上阈值120,下阈值100检测结果。

