
Kalman Filter (卡尔曼滤波笔记)
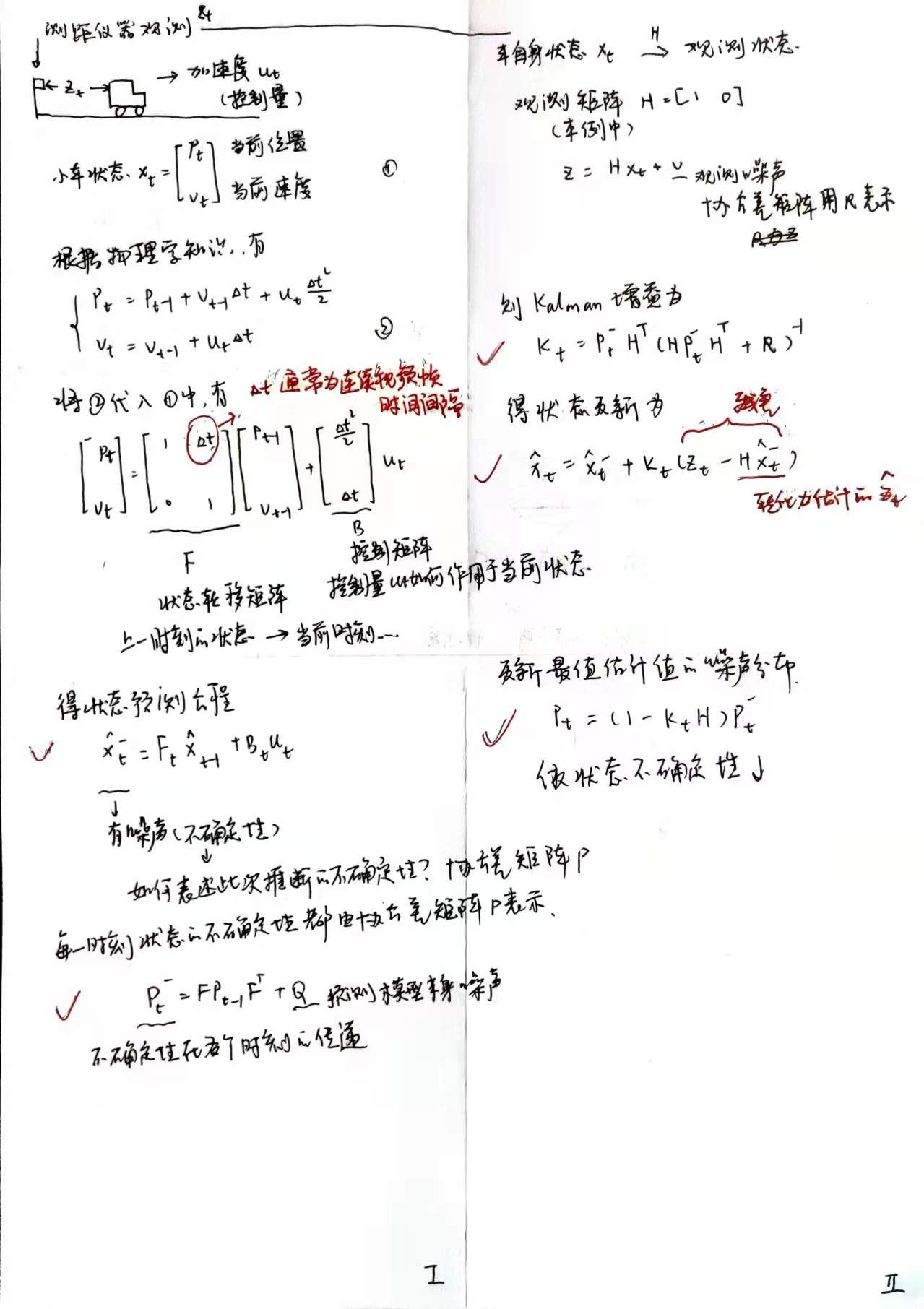
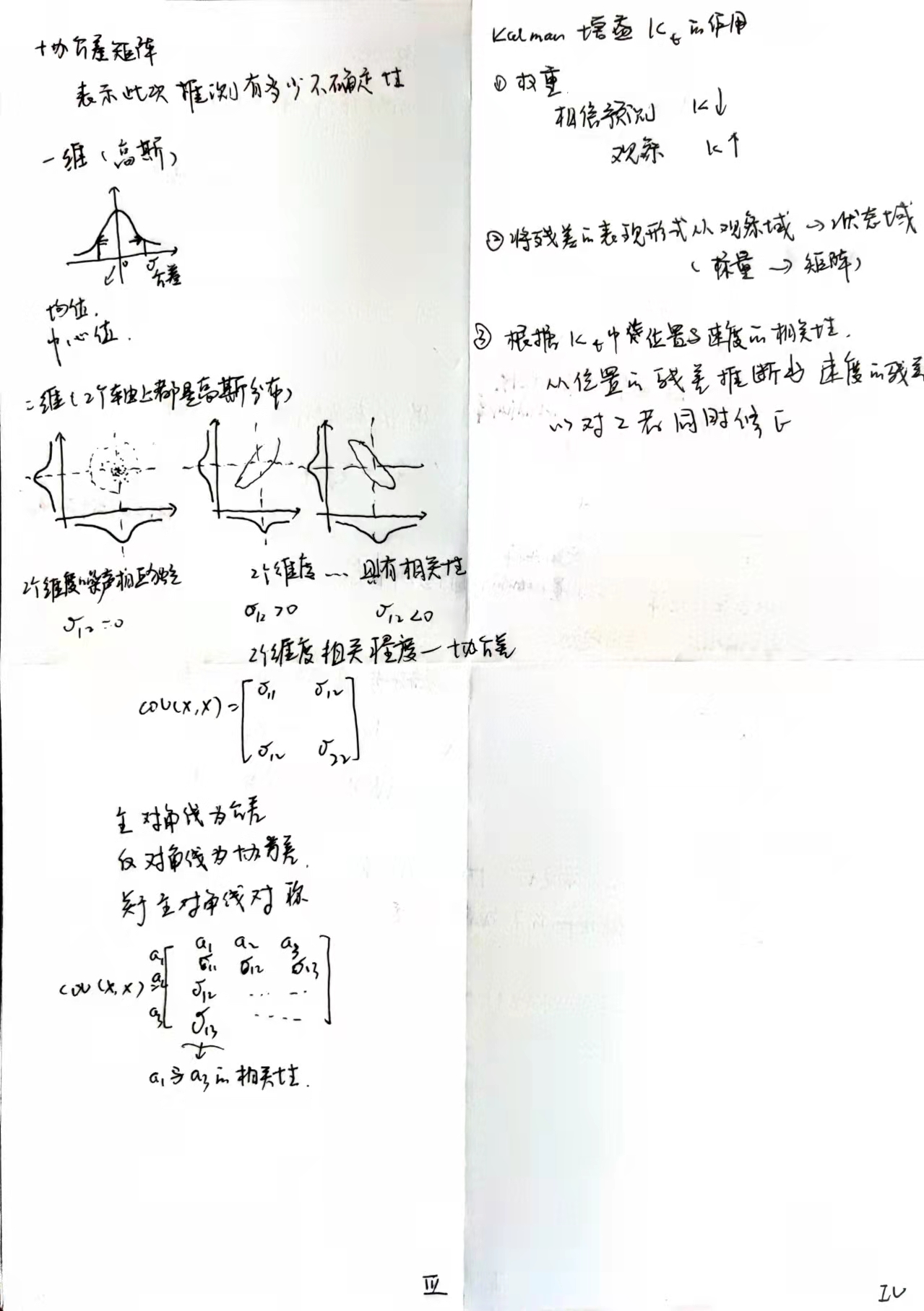
数学原理
example
learning opencv3 example 17-01
// Example 17-1. Kalman filter example code #include <vector> #include <iostream> #include <cstdlib> #include <fstream> #include <opencv2/opencv.hpp> using std::cout; using std::endl; #define phi2xy(mat) \ cv::Point(cvRound(img.cols / 2 + img.cols / 3 * cos(mat.at<float>(0))), \ cvRound(img.rows / 2 - img.cols / 3 * sin(mat.at<float>(0)))) void help(char** argv ) { cout << "\n" << "Example 17-1: code for using cv::KalmanFilter\n" << argv[0] << "\n\n" << "For example:\n" << argv[0] <<"\n\n" << "Esc to quit\n" << endl; } int main(int argc, char** argv) { help(argv); // Initialize, create Kalman filter object, window, random number // generator etc. // cv::Mat img(500, 500, CV_8UC3); cv::KalmanFilter kalman(2, 1, 0); // state is (phi, delta_phi) - angle and angular velocity // Initialize with random guess. // cv::Mat x_k(2, 1, CV_32F); randn(x_k, 0.0, 0.1); // process noise // cv::Mat w_k(2, 1, CV_32F); // measurements, only one parameter for angle // cv::Mat z_k = cv::Mat::zeros(1, 1, CV_32F); // Transition matrix 'F' describes relationship between // model parameters at step k and at step k+1 (this is // the "dynamics" in our model. // float F[] = {1, 1, 0, 1}; kalman.transitionMatrix = cv::Mat(2, 2, CV_32F, F).clone(); // Initialize other Kalman filter parameters. // cv::setIdentity(kalman.measurementMatrix, cv::Scalar(1)); cv::setIdentity(kalman.processNoiseCov, cv::Scalar(1e-5)); cv::setIdentity(kalman.measurementNoiseCov, cv::Scalar(1e-1)); cv::setIdentity(kalman.errorCovPost, cv::Scalar(1)); // choose random initial state // randn(kalman.statePost, 0.0, 0.1); for (;;) { // predict point position // cv::Mat y_k = kalman.predict(); // generate measurement (z_k) // cv::randn(z_k, 0.0, sqrt(static_cast<double>(kalman.measurementNoiseCov.at<float>(0, 0)))); z_k = kalman.measurementMatrix*x_k + z_k; // plot points (e.g., convert // img = cv::Scalar::all(0); cv::circle(img, phi2xy(z_k), 4, cv::Scalar(128, 255, 255)); // observed cv::circle(img, phi2xy(y_k), 4, cv::Scalar(255, 255, 255), 2); // predicted cv::circle(img, phi2xy(x_k), 4, cv::Scalar(0, 0, 255)); // actual to // planar co-ordinates and draw cv::imshow("Kalman", img); // adjust Kalman filter state // kalman.correct(z_k); // Apply the transition matrix 'F' (e.g., step time forward) // and also apply the "process" noise w_k // cv::randn(w_k, 0.0, sqrt(static_cast<double>(kalman.processNoiseCov.at<float>(0, 0)))); x_k = kalman.transitionMatrix*x_k + w_k; // exit if user hits 'Esc' if ((cv::waitKey(100) & 255) == 27) { break; } } return 0; }
参考文献
[1]https://www.bilibili.com/video/BV1MY4y1p7W7?p=7&share_source=copy_web
[2]https://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/
[3]Adrian Kaehler.learning opencv3.615-634
[4]Welsh, G., and G. Bishop. “An introduction to the Kalman filter” (Techni‐
cal Report TR95-041), University of North Carolina, Chapel Hill, NC, 1995.
[5]aybeck, Peter S. 1979. Stochastic Models, Estimation, and Control, Vol-ume 1, Academic Press, Inc.
本文作者:榴红八色鸫
本文链接:https://www.cnblogs.com/hezexian/p/16170826.html
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。
分类:
OpenCV



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步