
传统算法——分水岭算法
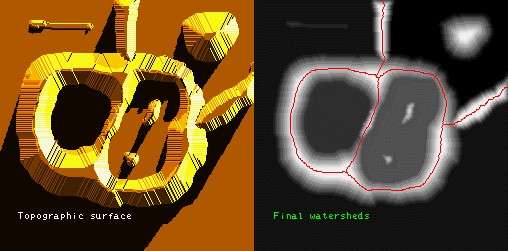
分水岭算法是一种基于区域分割的算法。它是基于地理形态的分析的图像分割算法,模仿地理结构(比如山川、沟壑,盆地)来实现对不同物体的分类。封闭性是分水岭算法的一个重要特征
图像的灰度空间很像地球表面的整个地理结构,每个像素的灰度值代表高度。其中的灰度值较大的像素连成的线可以看做山脊,也就是分水岭。其中的水就是用于二值化的gray threshold level,二值化阈值可以理解为水平面,比水平面低的区域会被淹没,刚开始用水填充每个孤立的山谷(局部最小值)。当水平面上升到一定高度时,水就会溢出当前山谷,可以通过在分水岭上修大坝,从而避免两个山谷的水汇集,这样图像就被分成2个像素集,一个是被水淹没的山谷像素集,一个是分水岭线像素集。最终这些大坝形成的线就对整个图像进行了分区,实现对图像的分割。在该算法中,空间上相邻并且灰度值相近的像素被划分为一个区域。

分水岭算法的运行过程:
- 把梯度图像中的所有像素按照灰度值进行分类,并设定一个测地距离阈值。
- 找到灰度值最小的像素点(默认标记为灰度值最低点),让threshold从最小值开始增长,这些点为起始点。
- 水平面在增长的过程中,会碰到周围的邻域像素,测量这些像素到起始点(灰度值最低点)的测地距离,如果小于设定阈值,则将这些像素淹没,否则在这些像素上设置大坝,这样就对这些邻域像素进行了分类。
- 随着水平面越来越高,会设置更多更高的大坝,直到灰度值的最大值,所有区域都在分水岭线上相遇,这些大坝就对整个图像像素的进行了分区。
用上面的算法对图像进行分水岭运算,由于噪声点或其它因素的干扰,可能会得到密密麻麻的小区域,即图像被分得太细(over-segmented,过度分割),这因为图像中有非常多的局部极小值点,每个点都会自成一个小区域。
其中的解决方法:
- 对图像进行高斯平滑操作,抹除很多小的最小值,这些小分区就会合并。
- 不从最小值开始增长,可以将相对较高的灰度值像素作为起始点(需要用户手动标记),从标记处开始进行淹没,则很多小区域都会被合并为一个区域,这被称为基于图像标记(mark)的分水岭算法。
下面三个图分别是原图,分水岭过分割的图以及基于标记的分水岭算法得到的图: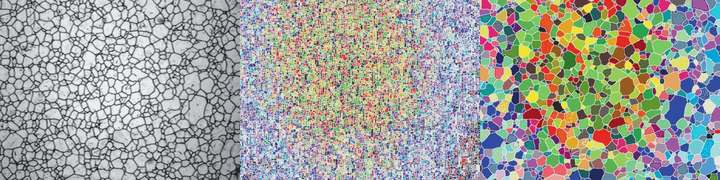
其中标记的每个点就相当于分水岭中的注水点,从这些点开始注水使得水平面上升,但是如上图所示,图像中需要分割的区域太多了,手动标记太麻烦,我们可是使用距离转换的方法进行标记,OpenCV中就是使用的这种方法。
OpenCV中分水岭算法
在OpenCV中,我们需要给不同区域贴上不同的标签。用大于1的整数表示我们确定为前景或对象的区域,用1表示我们确定为背景或非对象的区域,最后用0表示我们无法确定的区域。然后应用分水岭算法,我们的标记图像将被更新,更新后的标记图像的边界像素值为-1。
下面对相互接触的硬币应用距离变换和分水岭分割。
 图6
图6
先使用 Otsu's 二值化对图像进行二值化。
import cv2
import numpy as np
img = cv2.imread('coins.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU) 图7
图7
先使用开运算去除图像中的细小白色噪点,然后通过腐蚀运算移除边界像素,得到的图像中的白色区域肯定是真实前景,即靠近硬币中心的区域(下面左边的图);膨胀运算使得一部分背景成为了物体到的边界,得到的图像中的黑色区域肯定是真实背景,即远离硬币的区域(下面中间的图)。
剩下的区域(硬币的边界附近)还不能确定是前景还是背景。可通过膨胀图减去腐蚀图得到,下图中的白色部分为不确定区域(下面右边的图)。
# noise removal
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3,3))
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)
sure_bg = cv2.dilate(opening, kernel, iterations=2) # sure background area
sure_fg = cv2.erode(opening, kernel, iterations=2) # sure foreground area
unknown = cv2.subtract(sure_bg, sure_fg) # unknown area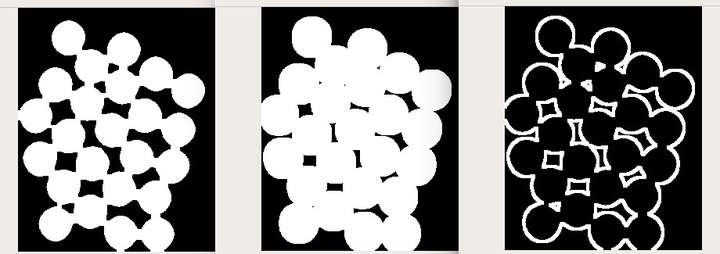 图8
图8
剩下的区域不确定是硬币还是背景,这些区域通常在前景和背景接触的区域(或者两个不同硬币接触的区域),我们称之为边界。通过分水岭算法应该能找到确定的边界。
由于硬币之间彼此接触,我们使用另一个确定前景的方法,就是带阈值的距离变换。
下面左边的图为得到的距离转换图像,其中每个像素的值为其到最近的背景像素(灰度值为0)的距离,可以看到硬币的中心像素值最大(中心离背景像素最远)。对其进行二值处理就得到了分离的前景图(下面中间的图),白色区域肯定是硬币区域,而且还相互分离,下面右边的图为之前的膨胀图减去中间这个表示前景的图。
# Perform the distance transform algorithm
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)
# Normalize the distance image for range = {0.0, 1.0}
cv2.normalize(dist_transform, dist_transform, 0, 1.0, cv2.NORM_MINMAX)
# Finding sure foreground area
ret, sure_fg = cv2.threshold(dist_transform, 0.5*dist_transform.max(), 255, 0)
# Finding unknown region
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg,sure_fg)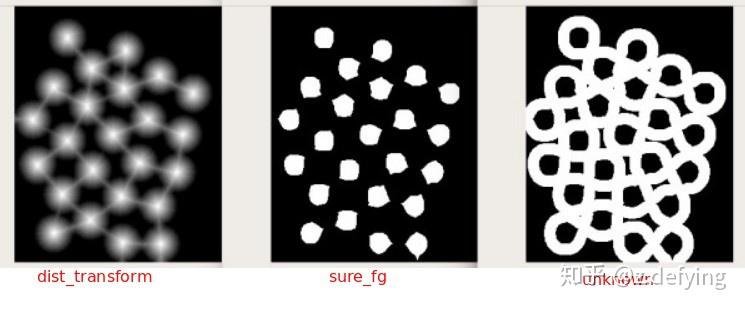 图9
图9
现在我们可以确定哪些是硬币区域,哪些是背景区域。然后创建标记(marker,它是一个与原始图像大小相同的矩阵,int32数据类型),表示其中的每个区域。分水岭算法将标记的0的区域视为不确定区域,将标记为1的区域视为背景区域,将标记大于1的正整数表示我们想得到的前景。
我们可以使用 cv2.connectedComponents() 来实现这个功能,它是用0标记图像的背景,用大于0的整数标记其他对象。所以我们需要对其进行加一,用1来标记图像的背景。
cv2.connectedComponents() 将传入图像中的白色区域视为组件(前景)。
# Marker labelling
ret, markers = cv2.connectedComponents(sure_fg)
# Add one to all labels so that sure background is not 0, but 1
markers = markers+1
# Now, mark the region of unknown with zero
markers[unknown==255] = 0
注意:得到的markers矩阵的元素类型为 int32,要使用 imshow() 进行显示,需要将其转换为 uint8 类型( markers=np.uint8(markers) )。
我们对得到的markers进行显示:
markers_copy = markers.copy()
markers_copy[markers==0] = 150 # 灰色表示背景
markers_copy[markers==1] = 0 # 黑色表示背景
markers_copy[markers>1] = 255 # 白色表示前景
markers_copy = np.uint8(markers_copy)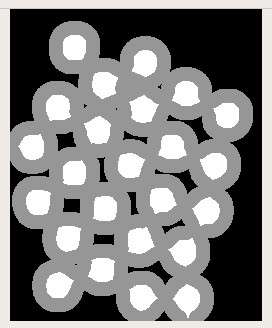 图10
图10
标记图像已经完成了,最后应用分水岭算法。然后标记图像将被修改,边界区域将被标记为-1。
# 使用分水岭算法执行基于标记的图像分割,将图像中的对象与背景分离
markers = cv2.watershed(img, markers)
img[markers==-1] = [0,0,255] # 将边界标记为红色
经过分水岭算法得到的新的标记图像和分割后的图像如下图所示:
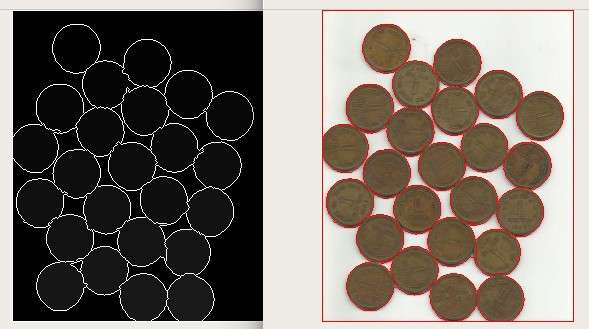 图11
图11
任何两个相邻连接的组件不一定被分水岭边界(-1的像素)分开;例如在传递给 watershed 函数的初始标记图像中的物体相互接触。
总结
我们通过一个例子介绍了分水岭算法的整个过程,主要分为以下几步:
- 对图进行灰度化和二值化得到二值图像
- 通过膨胀得到确定的背景区域,通过距离转换得到确定的前景区域,剩余部分为不确定区域
- 对确定的前景图像进行连接组件处理,得到标记图像
- 根据标记图像对原图像应用分水岭算法,更新标记图像
参考链接https://zhuanlan.zhihu.com/p/67741538
https://www.cnblogs.com/qinguoyi/p/8372157.html
https://blog.csdn.net/zhangjunp3/article/details/79672098
https://docs.opencv.org/4.x/d3/db4/tutorial_py_watershed.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 全程不用写代码,我用AI程序员写了一个飞机大战
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· MongoDB 8.0这个新功能碉堡了,比商业数据库还牛
· .NET10 - 预览版1新功能体验(一)