智能移动机器人 -01 简介
移动机器人(Mobile Robot)是具有移动能力的机器人,它是对动物移动能力的一种模拟和扩展,移动机器人能够有效扩大机器人的工作范围和活动空间。
移动机器人分为:轮式(Wheeled)机器人、履带式机器人、足式机器人和躯干式机器人等。
轮式(wheeled)机器人

主要结构
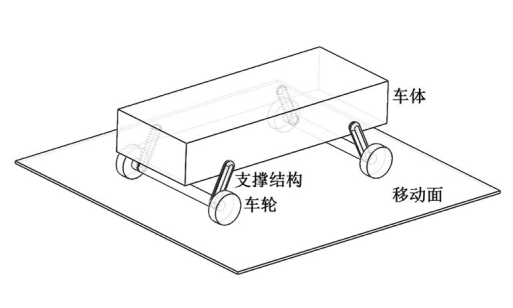
轮式机器人由车体、车轮、车体-车轮之间的支撑机构及车轮驱动机构组成。
-
车体:用于安装各种元器件、承载负重;
-
驱动机构:用于产生轮子的驱动力矩和制动力矩;
-
车轮:承受全车重量;在车轮驱动机构的作用下运动或者制动,通过地面的摩擦作用形成对整个车子的牵引力或制动力,形成车子运动;
-
支撑机构:连接车体与车轮;将重量分布到各个轮子;减轻车轮震动对车体影响的作用;确保所有车轮着地;
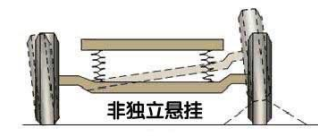
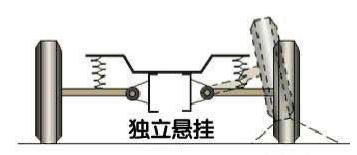
支撑机构的主要类型
-
非独立悬挂
-
独立悬挂
-
摇臂悬挂
火星车采用摇臂悬挂机构:用平衡梁将两个前进车轮耦合起来,再用平衡梁耦合该杆和后轮。当前后左右移动面出现落差,空间连杆机构能保证6个轮子始终着地。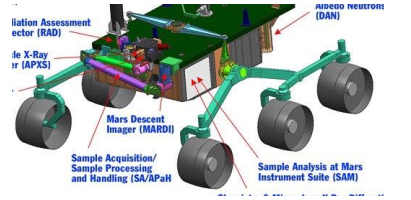
主要特点
-
机构简单;
-
与地面为连续点接触;
-
效率极大地依赖于环境情况,特别是地面的平坦度和硬度,在非结构环境中移动性能较差;
履带式(Track)机器人
通过履带的面接触方式来适应地面的不平整性。

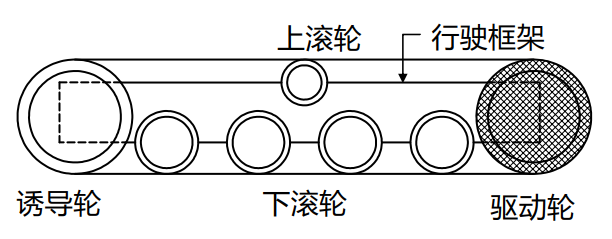
履带机构
履带机构主要由履带、支撑履带的链轮、滚轮以及承载这些零部件的行驶框架构成。
-
驱动轮旋转驱动履带循环,诱导轮和驱动轮一起支撑履带;下部滚轮用来减少履带下部着地压强的不均匀性;
-
上滚轮的作用是防止履带下垂;
主要特点
-
与地面为连续面接触,可较好地适应不平整地面和松软地面;
-
稳定性好、接地比压大、牵引力大
-
会对地面造成较大磨损
-
适合军事、救援等领域
足式(Legged)机器人
足式机器人模拟了人或足式动物,与地面为非连续点接触,对行走路面的要求很低。
足式机器人的优势
-
离散落脚点
-
能够适应复杂多变的地形
-
能够适应不同的地面状况
-
能够跨越障碍物和沟壑
-
具有较小的地面支撑压力
-
-
多自由度、多肢体
-
能够自主调节身体高度
-
能够自主隔振、确保稳定
-
具有静态稳定运动容错性
-
能够利用腿足操作物体
-
足式机器人面临的困难
-
难建模
-
易失稳
-
能耗高
躯干式(Trunk)机器人
依附于空间的移动方式,以仿生为主要研发趋势
移动机器人的关键性能
-
通行能力:与工作空间、移动方式及移动能力有关
-
移动方式
-
移动能力:移动自由度,通常称为机动度,描述移动机器人空间运动灵活度
-
速度:最大最小的速度/加速度
-
载荷能力:在满足其他性能要求的情况下,机器人能够承载的负荷重量;
-
运动精度:
-
到点精度:机器人移动到点的实际位置和理想位置之间的差距
-
重复精度:在相同的位置指令下,机器人连续重复运动若干次,其位置的分散情况
-
-
运动稳定性:
-
静态稳定:质心在支撑区域内
-
动态稳定:ZMP/CoP等在支撑区域内
-
-
移动自主性:
- 遥控、半自主、全自主
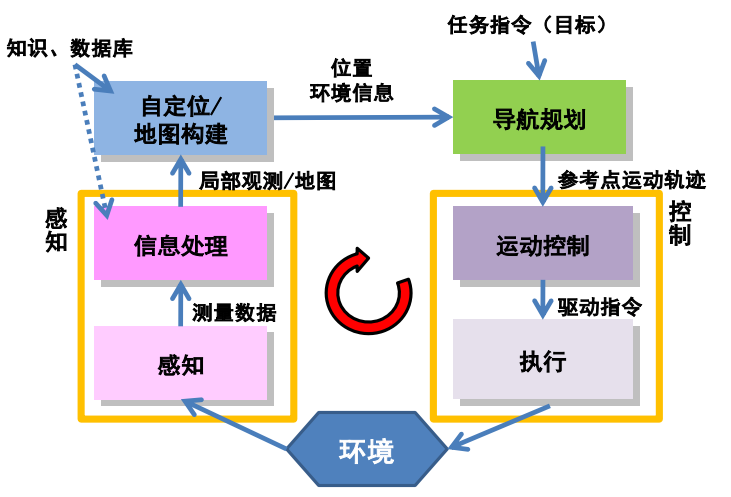
自主移动机器人
需要解决的关键问题
-
Where am I?(自定位)
-
Where am I going?(目标规划)
-
How do I get there?(导航规划)
一般结构:感知-决策-执行
如果觉得这篇文章对您有用的话,请点推荐或者关注,这对我来说是十分宝贵的鼓励!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号