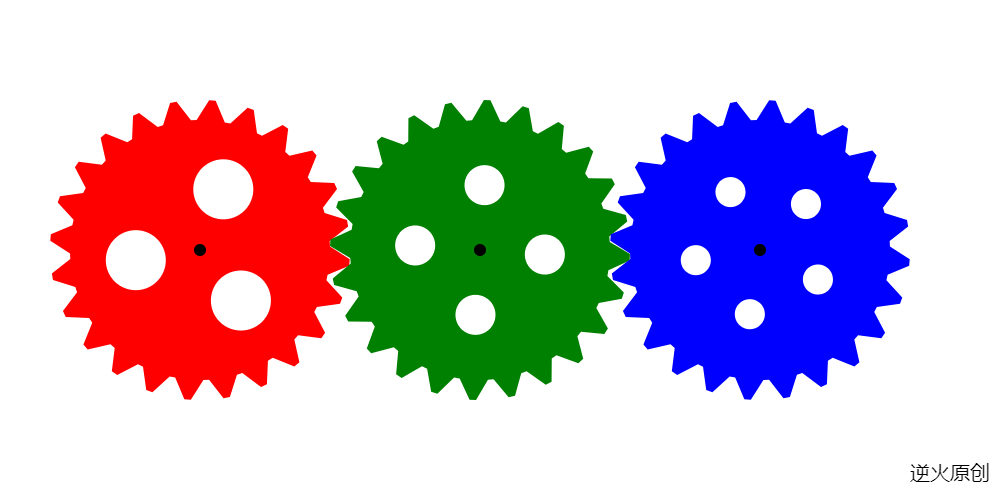
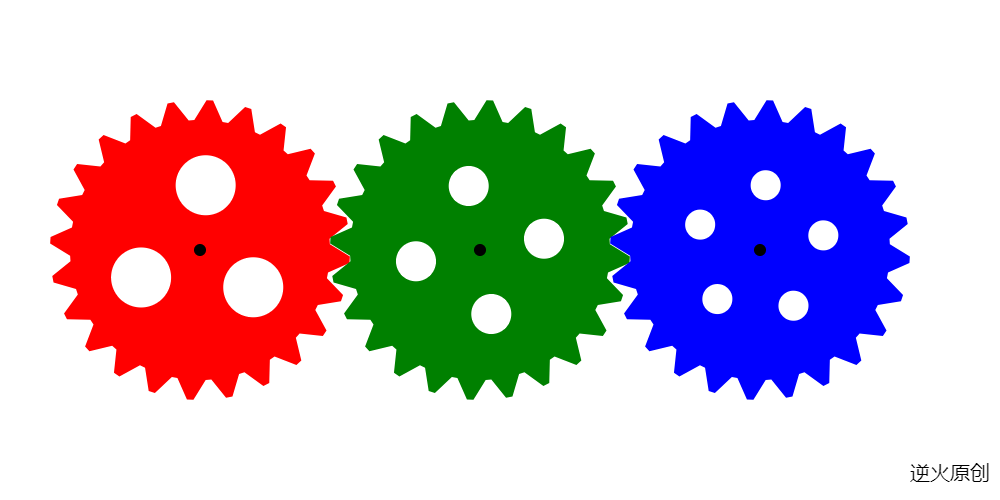
【Canvas与艺术】三斜齿齿轮联动效果
【关键点】
1.具体如何勾画出斜齿齿轮;
2.相邻两齿轮的啮合角是齿角的一半。
【图示】

【代码】
<!DOCTYPE html> <html lang="utf-8"> <meta http-equiv="Content-Type" content="text/html; charset=utf-8"/> <head> <title>三齿轮联动</title> <style type="text/css"> .centerlize{ margin:0 auto; width:1200px; } </style> </head> <body onload="init();"> <div class="centerlize"> <canvas id="myCanvas" width="512px" height="512px" style="border:1px dotted black;"> 如果看到这段文字说您的浏览器尚不支持HTML5 Canvas,请更换浏览器再试. </canvas> </div> </body> </html> <script type="text/javascript"> <!-- /***************************************************************** * 将全体代码(从<!DOCTYPE到script>)拷贝下来,粘贴到文本编辑器中, * 另存为.html文件,再用chrome浏览器打开,就能看到实现效果。 ******************************************************************/ // canvas的绘图环境 var ctx; // 边长 const WIDTH=1000; const HEIGHT=500; // 舞台对象 var stage; //------------------------------- // 初始化 //------------------------------- function init(){ // 获得canvas对象 var canvas=document.getElementById('myCanvas'); canvas.width=WIDTH; canvas.height=HEIGHT; // 初始化canvas的绘图环境 ctx=canvas.getContext('2d'); ctx.translate(WIDTH/2,HEIGHT/2);// 原点平移到画布中央 // 准备 stage=new Stage(); stage.init(); // 开幕 animate(); } // 播放动画 function animate(){ stage.update(); stage.paintBg(ctx); stage.paintFg(ctx); // 循环 if(true){ window.requestAnimationFrame(animate); } } // 舞台类 function Stage(){ // 转角 this.angle=0; // 初始化 this.init=function(){ } // 更新 this.update=function(){ this.angle+=Math.PI/180; } // 画背景 this.paintBg=function(ctx){ ctx.clearRect(-WIDTH/2,-HEIGHT/2,WIDTH,HEIGHT);// 清屏 ctx.font="20px consolas"; ctx.textAlign="center"; ctx.textBaseLine="Middle"; ctx.fillStyle="black"; ctx.fillText("逆火原创",WIDTH/2-50,HEIGHT/2-20); } // 画前景 this.paintFg=function(ctx){ // 以下为三孔齿轮 ctx.save(); ctx.translate(-300,0); ctx.rotate(this.angle); // 齿轮轮廓 var gearArr=getGearArray(24,Math.PI/36,150,130); ctx.beginPath(); for(var i=0;i<gearArr.length;i++){ ctx.lineTo(gearArr[i].x,gearArr[i].y); } ctx.closePath(); ctx.fillStyle="red"; ctx.fill(); // 三孔 for(var i=0;i<3;i++){ var theta=Math.PI*2/3*i; var r=65; var x=r*Math.cos(theta); var y=r*Math.sin(theta); ctx.beginPath(); ctx.arc(x,y,30,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="white"; ctx.fill(); } // 圆心 ctx.beginPath(); ctx.arc(0,0,6,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="black"; ctx.fill(); ctx.restore(); // 以下为四孔齿轮 ctx.save(); ctx.translate(-20,0); ctx.rotate(-this.angle-Math.PI*2/48);// 啮合两轮间差齿角的一半 // 齿轮轮廓 var gearArr=getGearArray(24,Math.PI/36,150,130); ctx.beginPath(); for(var i=0;i<gearArr.length;i++){ ctx.lineTo(gearArr[i].x,gearArr[i].y); } ctx.closePath(); ctx.fillStyle="green"; ctx.fill(); // 四孔 for(var i=0;i<4;i++){ var theta=Math.PI*2/4*i; var r=65; var x=r*Math.cos(theta); var y=r*Math.sin(theta); ctx.beginPath(); ctx.arc(x,y,20,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="white"; ctx.fill(); } // 圆心 ctx.beginPath(); ctx.arc(0,0,6,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="black"; ctx.fill(); ctx.restore(); // 以下为五孔齿轮 ctx.save(); ctx.translate(260,0); ctx.rotate(this.angle);// 啮合两轮间差齿角的一半 // 齿轮轮廓 var gearArr=getGearArray(24,Math.PI/36,150,130); ctx.beginPath(); for(var i=0;i<gearArr.length;i++){ ctx.lineTo(gearArr[i].x,gearArr[i].y); } ctx.closePath(); ctx.fillStyle="blue"; ctx.fill(); // 五孔 for(var i=0;i<5;i++){ var theta=Math.PI*2/5*i; var r=65; var x=r*Math.cos(theta); var y=r*Math.sin(theta); ctx.beginPath(); ctx.arc(x,y,15,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="white"; ctx.fill(); } // 圆心 ctx.beginPath(); ctx.arc(0,0,6,0,Math.PI*2,false); ctx.closePath(); ctx.fillStyle="black"; ctx.fill(); ctx.restore(); } } // 取得一个齿轮全部控制点的函数 // n:齿轮齿数 // angle:齿斜面倾角 // outerRadius:齿轮外径 // innerRadius:齿轮内径 function getGearArray(n,angle,outerRadius,innerRadius){ // 准备齿轮数组 var gearArr=new Array(); for(var i=0;i<n*2;i++){ var alpha=Math.PI/n*i; var bata=alpha+angle; var x1,y1,x2,y2; if(i%2==1){ x1=innerRadius*Math.cos(alpha); y1=innerRadius*Math.sin(alpha); x2=outerRadius*Math.cos(bata); y2=outerRadius*Math.sin(bata); }else{ x1=outerRadius*Math.cos(alpha); y1=outerRadius*Math.sin(alpha); x2=innerRadius*Math.cos(bata); y2=innerRadius*Math.sin(bata); } gearArr.push({x:x1,y:y1}); gearArr.push({x:x2,y:y2}); } return gearArr; } /*--------------------------------------------- 人还得努力走出舒适圈, 去找寻真正适合自己的成功之道, 而不是强行改变自己去适应工作岗位。 别到老了,只有抱怨自己退休金不足的怨气。 ----------------------------------------------*/ //--> </script>
END

 浙公网安备 33010602011771号
浙公网安备 33010602011771号