
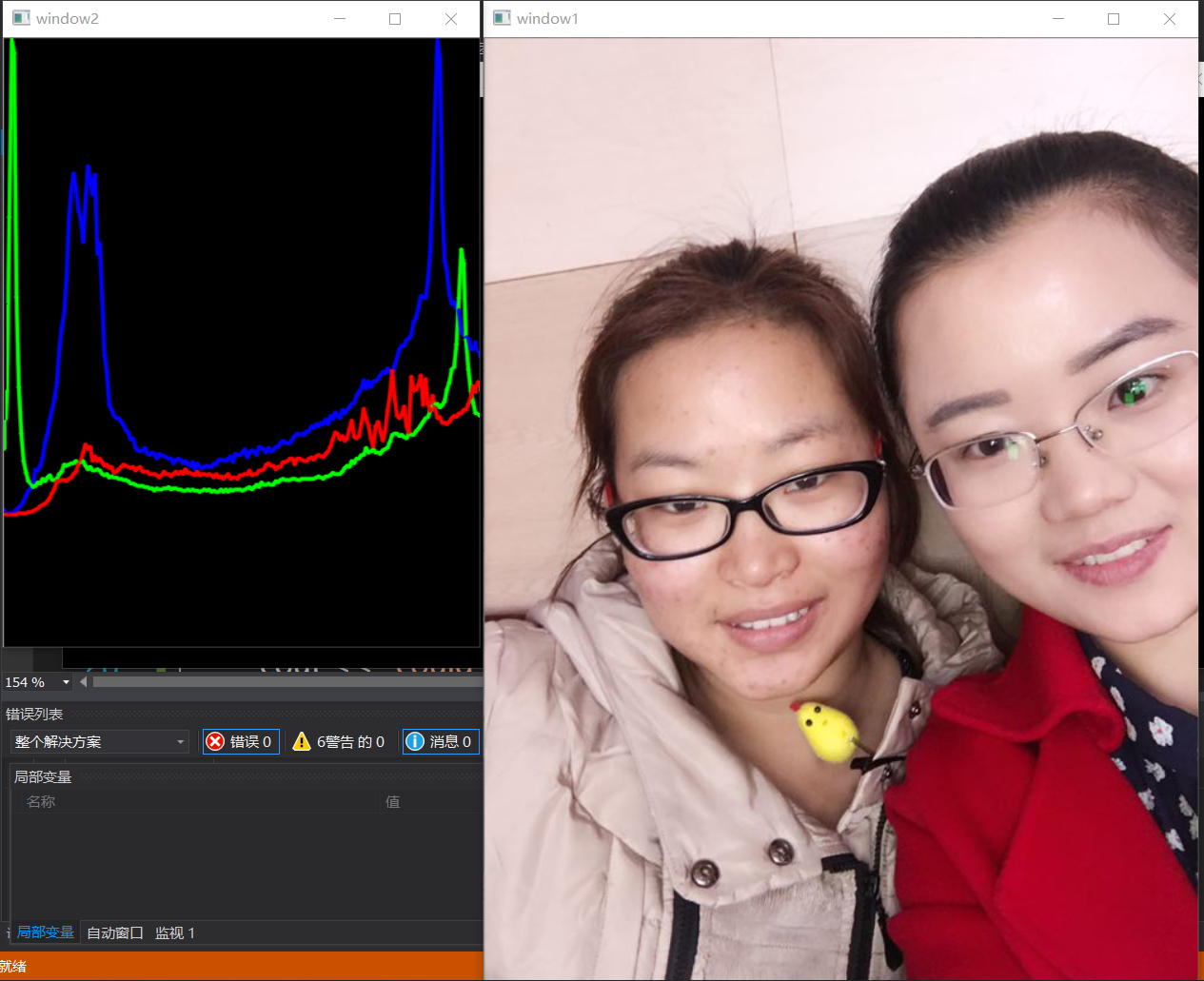
Opencv 图片直方图
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
Mat img1, img2, img3, img_gray, map_x, map_y;
char win1[] = "window1";
char win2[] = "window2";
char win3[] = "window3";
char win4[] = "window4";
int threshold_value = 0;
int max_value = 255;
RNG rng(12345);
int Demo_Histogram();
int index = 0;
//Remap
int Demo_Histogram()
{
img1 = imread("D://images//1//9.jpg");
if (img1.empty())
{
cout << "could not load image..." << endl;
return 0;
}
imshow(win1, img1);
vector<Mat> bgr_planes;
//把多通道图像分为多个单通道图像
split(img1,bgr_planes);
//imshow(win2,bgr_planes);
int histSize = 256;
float range[] = {0,256};
const float *histRanges = {range};
Mat b_hist, g_hist, r_hist;
calcHist(&bgr_planes[0], 1, 0, Mat(), b_hist, 1, &histSize, &histRanges, true, false);
calcHist(&bgr_planes[1], 1, 0, Mat(), g_hist, 1, &histSize, &histRanges, true, false);
calcHist(&bgr_planes[2], 1, 0, Mat(), r_hist, 1, &histSize, &histRanges, true, false);
int hist_h = 400;
int hist_w = 512;
int bin_w = hist_w / histSize;
Mat histImage(hist_w,hist_h,CV_8UC3,Scalar(0,0,0));
//归一化处理
normalize(b_hist, b_hist, 0, hist_h, NORM_MINMAX, -1, Mat());
normalize(g_hist, g_hist, 0, hist_h, NORM_MINMAX, -1, Mat());
normalize(r_hist, r_hist, 0, hist_h, NORM_MINMAX, -1, Mat());
for (int i=1;i<histSize;i++)
{
line(histImage,
Point((i-1)*bin_w,hist_h-cvRound(b_hist.at<float>(i-1))),
Point((i)*bin_w, hist_h - cvRound(b_hist.at<float>(i))),
Scalar(255,0,2),2,LINE_AA);
line(histImage,
Point((i - 1)*bin_w, hist_h - cvRound(g_hist.at<float>(i - 1))),
Point((i)*bin_w, hist_h - cvRound(g_hist.at<float>(i))),
Scalar(0, 255, 2), 2, LINE_AA);
line(histImage,
Point((i - 1)*bin_w, hist_h - cvRound(r_hist.at<float>(i - 1))),
Point((i)*bin_w, hist_h - cvRound(r_hist.at<float>(i))),
Scalar(0, 0, 255), 2, LINE_AA);
}
imshow(win2, histImage);
return 0;
}
int main()
{
Demo_Histogram();
waitKey(0);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号