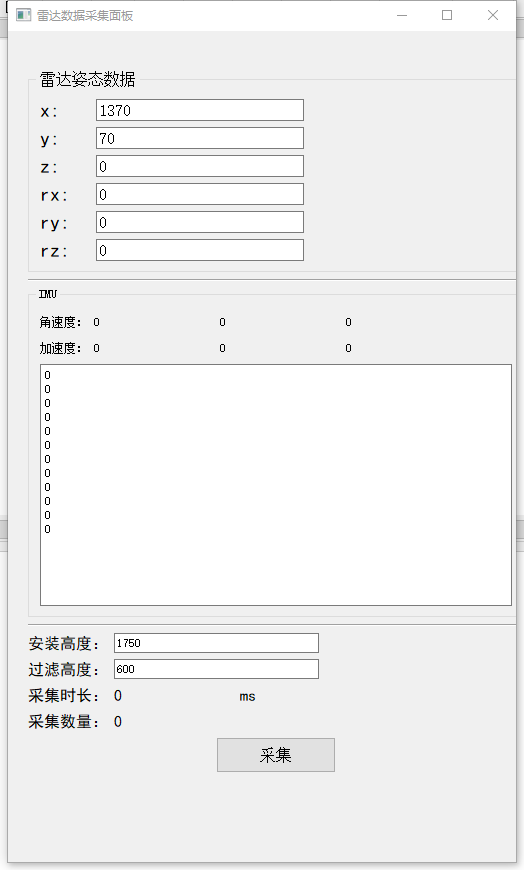
c++实现livox-mid70/360采集、保存点云数据
c++实现livox-mid70/360采集、保存点云数据
void PointCloudCallback(uint32_t handle, const uint8_t dev_type, LivoxLidarEthernetPacket* data, void* client_data) { if (data == nullptr) { return; } if (data->data_type == kLivoxLidarCartesianCoordinateHighData) { LivoxLidarCartesianHighRawPoint *p_point_data = (LivoxLidarCartesianHighRawPoint *)data->data; for (uint32_t i = 0; i < data->dot_num; i++) { { int32_t i_x = p_point_data[i].x; int32_t i_y = p_point_data[i].y; int32_t i_z = p_point_data[i].z; QVector<int> index_livox_point1; index_livox_point1.push_back(i_x); index_livox_point1.push_back(i_y); index_livox_point1.push_back(i_z); livox_points.push_back(index_livox_point1); } } } else if (data->data_type == kLivoxLidarCartesianCoordinateLowData) { LivoxLidarCartesianLowRawPoint *p_point_data = (LivoxLidarCartesianLowRawPoint *)data->data; } else if (data->data_type == kLivoxLidarSphericalCoordinateData) { LivoxLidarSpherPoint* p_point_data = (LivoxLidarSpherPoint *)data->data; } }


#########################
QQ 3087438119

 浙公网安备 33010602011771号
浙公网安备 33010602011771号