realsense 测量
realsense 测量
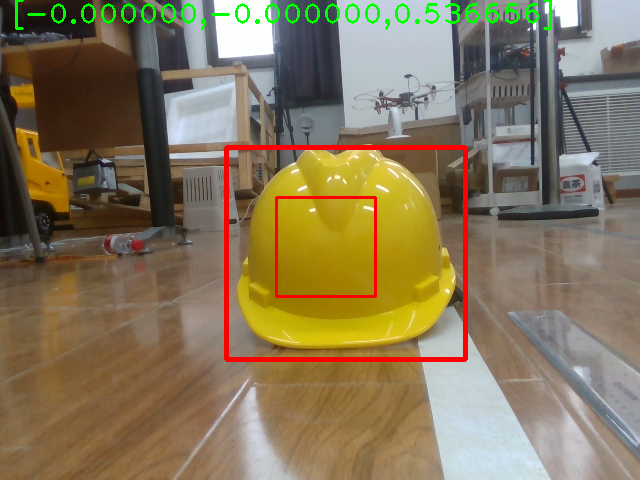
#include <iostream> using namespace std; #include <sstream> #include <iostream> #include <fstream> #include <algorithm> #include<string> #include<opencv2/imgproc/imgproc.hpp> #include<opencv2/core/core.hpp> #include<opencv2/highgui/highgui.hpp> using namespace cv; #include<librealsense2/rs.hpp> #include<librealsense2/rsutil.h> const double camera_factor = 1; const double camera_cx = 649.402466; const double camera_cy = 649.402466; const double camera_fx = 640.685730; const double camera_fy = 359.206085; double p_x = 0.0; double p_y = 0.0; double p_z = 0.0; Mat kernel1 = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1)); Mat kernel2 = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(7, 7), cv::Point(-1, -1)); Rect rect1; void processFrame(cv::Mat &mask, cv::Rect &rect2) { std::vector<std::vector<cv::Point>> vec_contours; std::vector<cv::Vec4i> hireachy; findContours(mask, vec_contours, hireachy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE, cv::Point(0, 0)); if (vec_contours.size()>0) { double maxArea = 0.0; for (size_t k = 0; k<vec_contours.size(); k++) { double area1 = contourArea(vec_contours[static_cast<int>(k)]); if (area1>maxArea) { maxArea = area1; rect2 = boundingRect(vec_contours[static_cast<int>(k)]); } } } else { rect2.x = rect2.y = rect2.width = rect2.height = 0; } } //获取深度像素对应长度单位(米)的换算比例 float get_depth_scale(rs2::device dev) { // Go over the device's sensors for (rs2::sensor& sensor : dev.query_sensors()) { // Check if the sensor if a depth sensor if (rs2::depth_sensor dpt = sensor.as<rs2::depth_sensor>()) { return dpt.get_depth_scale(); } } throw std::runtime_error("Device does not have a depth sensor"); } //深度图对齐到彩色图函数 Mat align_Depth2Color(Mat depth, Mat color, rs2::pipeline_profile profile) { //声明数据流 auto depth_stream = profile.get_stream(RS2_STREAM_DEPTH).as<rs2::video_stream_profile>(); auto color_stream = profile.get_stream(RS2_STREAM_COLOR).as<rs2::video_stream_profile>(); //获取内参 const auto intrinDepth = depth_stream.get_intrinsics(); const auto intrinColor = color_stream.get_intrinsics(); //直接获取从深度摄像头坐标系到彩色摄像头坐标系的欧式变换矩阵 //auto extrinDepth2Color=depth_stream.get_extrinsics_to(color_stream); rs2_extrinsics extrinDepth2Color; rs2_error *error; rs2_get_extrinsics(depth_stream, color_stream, &extrinDepth2Color, &error); //平面点定义 float pd_uv[2], pc_uv[2]; //空间点定义 float Pdc3[3], Pcc3[3]; //获取深度像素与现实单位比例(D435默认1毫米) float depth_scale = get_depth_scale(profile.get_device()); int y = 0, x = 0; //初始化结果 //Mat result=Mat(color.rows,color.cols,CV_8UC3,Scalar(0,0,0)); Mat result = Mat(color.rows, color.cols, CV_16U, Scalar(0)); //对深度图像遍历 for (int row = 0; row<depth.rows; row++) { for (int col = 0; col<depth.cols; col++) { //将当前的(x,y)放入数组pd_uv,表示当前深度图的点 pd_uv[0] = col; pd_uv[1] = row; //取当前点对应的深度值 uint16_t depth_value = depth.at<uint16_t>(row, col); //换算到米 float depth_m = depth_value*depth_scale; //将深度图的像素点根据内参转换到深度摄像头坐标系下的三维点 rs2_deproject_pixel_to_point(Pdc3, &intrinDepth, pd_uv, depth_m); //将深度摄像头坐标系的三维点转化到彩色摄像头坐标系下 rs2_transform_point_to_point(Pcc3, &extrinDepth2Color, Pdc3); //将彩色摄像头坐标系下的深度三维点映射到二维平面上 rs2_project_point_to_pixel(pc_uv, &intrinColor, Pcc3); //取得映射后的(u,v) x = (int)pc_uv[0]; y = (int)pc_uv[1]; // if(x<0||x>color.cols) // continue; // if(y<0||y>color.rows) // continue; //最值限定 x = x<0 ? 0 : x; x = x>depth.cols - 1 ? depth.cols - 1 : x; y = y<0 ? 0 : y; y = y>depth.rows - 1 ? depth.rows - 1 : y; result.at<uint16_t>(y, x) = depth_value; } } //返回一个与彩色图对齐了的深度信息图像 return result; } void measure_distance(Mat &color, Mat depth, cv::Size range, rs2::pipeline_profile profile) { //获取深度像素与现实单位比例(D435默认1毫米) float depth_scale = get_depth_scale(profile.get_device()); //定义图像中心点 //cv::Point center(color.cols / 2, color.rows / 2); ////////////////////////////// int center_x1 = color.cols / 2; int center_y1 = color.rows / 2; Mat mask; inRange(color, cv::Scalar(0, 125, 125), cv::Scalar(50, 255, 255), mask); if (!mask.empty()) { //imshow("mask", mask); } if (!mask.empty()) { morphologyEx(mask, mask, cv::MORPH_OPEN, kernel1, cv::Point(-1, -1), 1); dilate(mask, mask, kernel2, cv::Point(-1, -1), 4); //imshow("mask", mask); processFrame(mask, rect1);//寻找轮廓 rectangle(color, rect1, cv::Scalar(0, 0, 255), 4, 8, 0); //center_x1 = int((rect1.x + rect1.width*0.5)); //center_y1 = int((rect1.y + rect1.height*0.5)); center_x1 = int((rect1.x + rect1.width*0.5)); center_y1 = int((rect1.y + rect1.height*0.5)); } cv::Point center(center_x1, center_y1); ////////////////////////// //定义计算距离的范围 //cv::Rect RectRange(center.x - range.width / 2, center.y - range.height / 2, range.width, range.height); cv::Rect RectRange = rect1; //cv::Rect RectRange(rect1.x+50, rect1.y+50, 100,100); //遍历该范围 float distance_sum = 0; int effective_pixel = 0; int x1 = 0; int y1 = 0; for (int y = RectRange.y; y<RectRange.y + RectRange.height; y++) { for (int x = RectRange.x; x<RectRange.x + RectRange.width; x++) { //如果深度图下该点像素不为0,表示有距离信息 if (depth.at<uint16_t>(y, x)) { //depth_scale*depth.at<uint16_t>(y, x); //distance_sum += depth_scale*depth.at<uint16_t>(y, x); float d_value1 = depth_scale*depth.at<uint16_t>(y, x); //float x1 = (x - camera_cx)*d_value1 / camera_fx; //float y1 = (y-camera_cy)*d_value1/camera_fy; //std::cout << "[" <<x1<<" "<<y1<<" "<< d_value1 << "]"<< std::endl; distance_sum += d_value1; effective_pixel++; //x1 = x; //y1 = y; } } } //cout << "遍历完成,有效像素点:" << effective_pixel << " " << x1 << " " << y1 << " "<<distance_sum<<endl; cout << "遍历完成,有效像素点:" << effective_pixel << " " << distance_sum << endl; float effective_distance = distance_sum / effective_pixel; //Hauteur_XYZ(const rs2_intrinsics& intr, const rs2::depth_frame& frame, int x, int y, double H, double D, double angle, float wpoint[3], double dis_max, double dis_min) int x0 = center.x; int y0 = center.y; //if (depth.at<uint16_t>(y0, x0)) //{ float d_value1 = depth_scale*depth.at<uint16_t>(y0, x0); float x2 = (x0 - camera_cx)*d_value1 / camera_fx; float y2 = (y0 - camera_cy)*d_value1 / camera_fy; if (p_x==0 && p_y==0 && p_z==0) { p_x = x2; p_y = y2; p_z = effective_distance; } if (abs(x2)>0.0 && abs(y2)>0.0) { std::cout << "[" << x2 << " " << y2 << " " << effective_distance << "]" << std::endl; p_x = x2; p_y = y2; p_z = effective_distance; cout << "目标距离:" << effective_distance << " m" << endl; char distance_str[50]; //sprintf(distance_str, "the distance is:%f m", effective_distance); sprintf(distance_str, "[%f,%f,%f]", p_x, p_y, p_z); cv::rectangle(color, RectRange, Scalar(0, 0, 255), 2, 8); cv::putText(color, (string)distance_str, cv::Point(color.cols*0.02, color.rows*0.05), cv::FONT_HERSHEY_PLAIN, 2, Scalar(0, 255, 0), 2, 8); cv::circle(color, center, 4, cv::Scalar(0, 0, 255), 4, 8, 0); } else { char distance_str[50]; //sprintf(distance_str, "the distance is:%f m", effective_distance); sprintf(distance_str, "[%f,%f,%f]", p_x, p_y, p_z); cv::rectangle(color, RectRange, Scalar(0, 0, 255), 2, 8); cv::putText(color, (string)distance_str, cv::Point(color.cols*0.02, color.rows*0.05), cv::FONT_HERSHEY_PLAIN, 2, Scalar(0, 255, 0), 2, 8); cv::circle(color, center, 4, cv::Scalar(0, 0, 255), 4, 8, 0); } //} } // //static void Hauteur_Y(Mat &color, , cv::Size range, const rs2_intrinsics& intr, const rs2::depth_frame& frame, std::ofstream *outFile, // double H, double D, double angle, float wpoint[3], double dis_max, double dis_min) //{ // cv::Point center(color.cols / 2, color.rows / 2); // //定义计算距离的范围 // cv::Rect RectRange(center.x - range.width / 2, center.y - range.height / 2, range.width, range.height); // // // float upixel[2]; // From pixel // float upoint[3]; // From point (in 3D) // float xpoint[3]; // float extrin[4][4] = { { 1,0,0,0 },{ 0,cos(angle),sin(angle),H },{ 0,-sin(angle),cos(angle),0 },{ 0,0,0,1 } }; // upixel[0] = 20; // upixel[1] = 20; // auto udist = frame.get_distance(upixel[0], upixel[1]); // rs2_deproject_pixel_to_point(upoint, &intr, upixel, udist); // float b[4] = { upoint[0],upoint[1],upoint[2],1 }; // float out[4]; // for (int i = 0; i < 4; i++) // { // float s = 0; // for (int k = 0; k < 4; k++) // s += extrin[i][k] * b[k]; // out[i] = s; // // }; // if (udist < dis_max && udist > dis_min) // { // *outFile << out[0] << ';' << out[2] << ';' << -out[1] << ';' << out[0] << ';' << out[2] << ';' << -out[1] << ';' << "\n"; // wpoint[0] = out[0]; // wpoint[1] = out[2]; // wpoint[2] = -out[1]; // } //} int main() { const char* depth_win = "depth_Image"; namedWindow(depth_win, WINDOW_AUTOSIZE); const char* color_win = "color_Image"; namedWindow(color_win, WINDOW_AUTOSIZE); //深度图像颜色map rs2::colorizer c; // Helper to colorize depth images rs2::context ctx; //rs2::device* res_device = ctx. //创建数据管道 rs2::pipeline pipe; rs2::config pipe_config; pipe_config.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30); pipe_config.enable_stream(RS2_STREAM_COLOR, 640, 480, RS2_FORMAT_BGR8, 30); //start()函数返回数据管道的profile rs2::pipeline_profile profile = pipe.start(pipe_config); //定义一个变量去转换深度到距离 float depth_clipping_distance = 1.f; //声明数据流 auto depth_stream = profile.get_stream(RS2_STREAM_DEPTH).as<rs2::video_stream_profile>(); auto color_stream = profile.get_stream(RS2_STREAM_COLOR).as<rs2::video_stream_profile>(); rs2::device rs_dev = profile.get_device(); //获取内参 auto intrinDepth = depth_stream.get_intrinsics(); auto intrinColor = color_stream.get_intrinsics(); //直接获取从深度摄像头坐标系到彩色摄像头坐标系的欧式变换矩阵 auto extrinDepth2Color = depth_stream.get_extrinsics_to(color_stream); while (cvGetWindowHandle(depth_win) && cvGetWindowHandle(color_win)) // Application still alive? { //堵塞程序直到新的一帧捕获 rs2::frameset frameset = pipe.wait_for_frames(); //取深度图和彩色图 rs2::frame color_frame = frameset.get_color_frame();//processed.first(align_to); rs2::frame depth_frame = frameset.get_depth_frame(); rs2::frame depth_frame_4_show = frameset.get_depth_frame().apply_filter(c); //获取宽高 const int depth_w = depth_frame.as<rs2::video_frame>().get_width(); const int depth_h = depth_frame.as<rs2::video_frame>().get_height(); const int color_w = color_frame.as<rs2::video_frame>().get_width(); const int color_h = color_frame.as<rs2::video_frame>().get_height(); //创建OPENCV类型 并传入数据 Mat depth_image(Size(depth_w, depth_h), CV_16U, (void*)depth_frame.get_data(), Mat::AUTO_STEP); Mat depth_image_4_show(Size(depth_w, depth_h), CV_8UC3, (void*)depth_frame_4_show.get_data(), Mat::AUTO_STEP); Mat color_image(Size(color_w, color_h), CV_8UC3, (void*)color_frame.get_data(), Mat::AUTO_STEP); //实现深度图对齐到彩色图 Mat result = align_Depth2Color(depth_image, color_image, profile); measure_distance(color_image, result, cv::Size(20, 20), profile); //显示 imshow(depth_win, depth_image_4_show); imshow(color_win, color_image); //imshow("result",result); waitKey(1); } return 0; }
#############################
QQ 3087438119

 浙公网安备 33010602011771号
浙公网安备 33010602011771号