传统目标检测算法之DPM
转载:传统目标检测算法之DPM
前面介绍了一下HOG,HOG有一个缺点:很难处理遮挡问题,人体姿势动作幅度过大或物体方向改变也不易检测。
继2005年HOG提出之后,DPM模型在借鉴了HOG之后也被提了出来同时还取得了不错的成绩。
DPM概述
DPM(Deformable Part Model),正如其名称所述,可变形的组件模型,是一种基于组件的检测算法,其所见即其意。该模型由大神Felzenszwalb在2008年提出,并发表了一系列的cvpr,NIPS。并且还拿下了2010年,PASCAL VOC的“终身成就奖”。
DPM算法采用了改进后的HOG特征,SVM分类器和滑动窗口(Sliding Windows)检测思想,针对目标的多视角问题,采用了多组件(Component)的策略,针对目标本身的形变问题,采用了基于图结构(Pictorial Structure)的部件模型策略。此外,将样本的所属的模型类别,部件模型的位置等作为潜变量(Latent Variable),采用多示例学习(Multiple-instance Learning)来自动确定。
DPM特征

DPM检测模型

DPM检测流程
Latent SVM
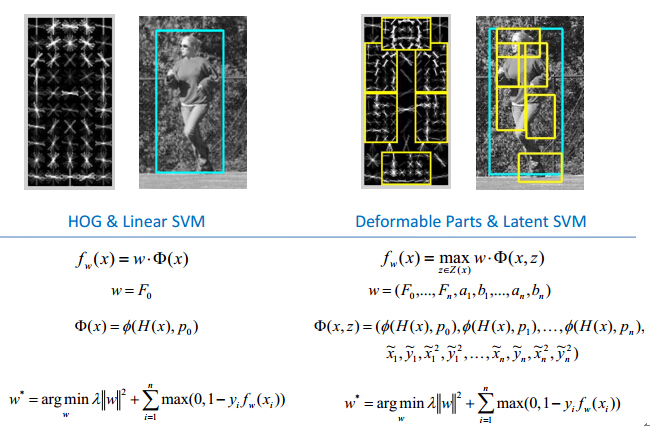
传统的Hog+SVM和DPM+LatentSVM的区别如上面公式所示。
由于,训练的样本中,负样本集肯定是100%的准确的,而正样本集中就可能有噪声。因为,正样本的标注是人工进行的,人是会犯错的,标注的也肯定会有不精确的。因此,需要首先去除里面的噪声数据。而对于剩下的数据,里面由于各种角度,姿势的不一样,导致训练的模型的梯度图也比较发散,无规则。因此需要选择其中的具有相同的姿势的数据,即离正负样本的分界线最近的那些样本,将离分界线很近的样本称为Hard-examples,相反,那些距离较远的称为Easy-examples。
实际效果图如下图所示:
Latent SVM接下来有时间独立开一篇去整理学习一下。
优缺点
DPM算法的步骤:
1、产生多个模板,整体模板以及不同的局部模板;
2、拿这些不同的模板同输入图像“卷积”产生特征图;
3、将这些特征图组合形成融合特征;
4、对融合特征进行传统分类,回归得到目标位置。
DPM算法优点:
1、方法直观简单;
2、运算速度块;
2、适应动物变形;
DPM算法缺点:
1、性能一般
2、激励特征人为设计,工作量大;
这种方法不具有普适性,因为用来检测人的激励模板不能拿去检测小猫或者小狗,所以在每做一种物件的探测的时候,都需要人工来设计激励模板,为了获得比较好的探测效果,需要花大量时间去做一些设计,工作量很大。
3、无法适应大幅度的旋转,稳定性很差;
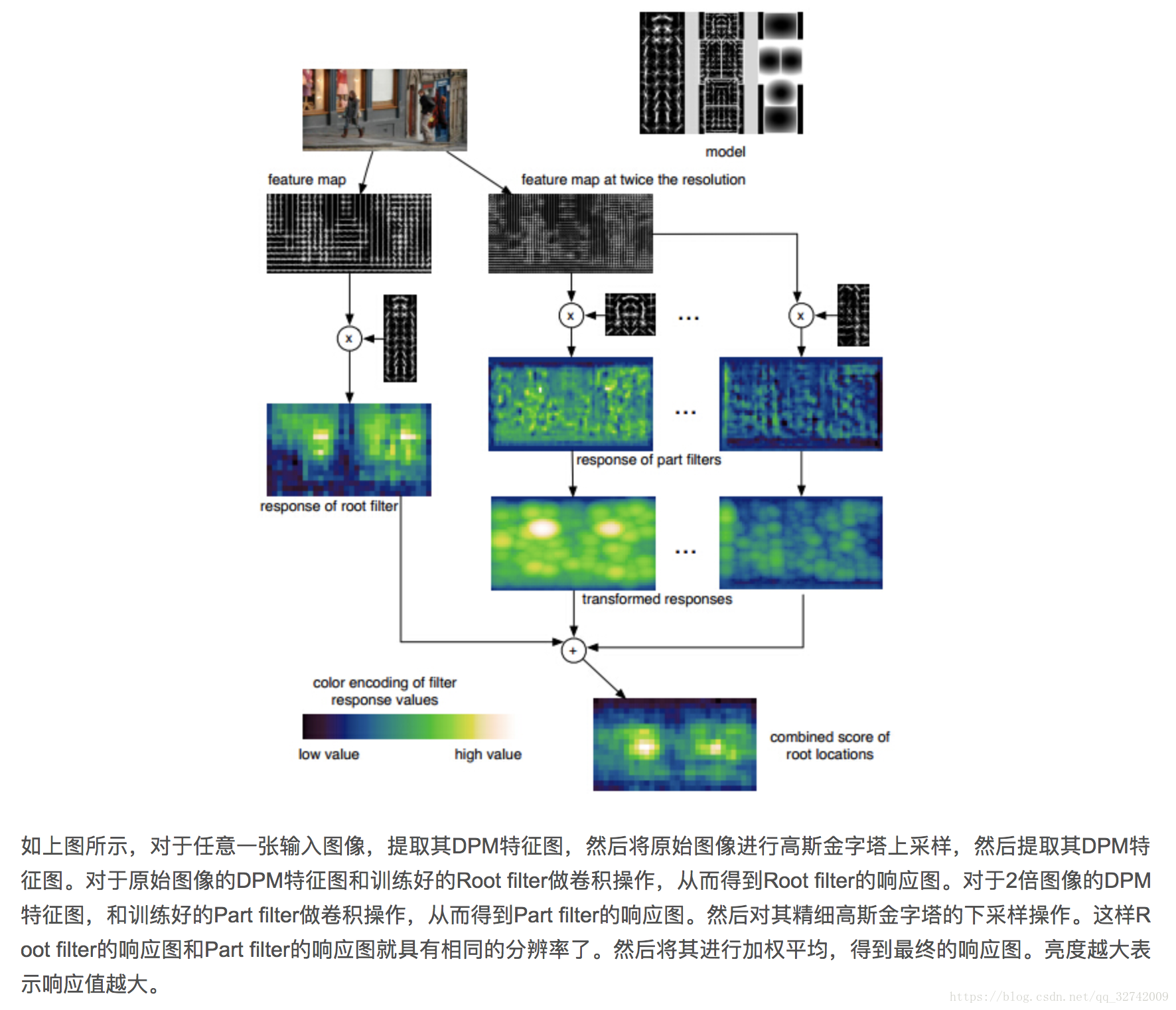
前面官方的话讲了一大堆,简单概括一下整体流程吧
- 首先要有根模型(root filter)和若干部件模型(part filter)和部件模型的偏离损失。这些东西就是通过已有的人体,四肢等样本提取HOG特征然后经过svm训练而来的。
- 用root filter提取原始图像的DMP特征图,再对DMP特征图用root filter和part filter计算响应图。(实际上就是一个模版匹配)
- 加权平均root的和part的,得到最终的融合特征图
- 对融合特征进行传统分类,回归得到目标位置。
DPM算法思想:输入一幅图像,对图像提取图像特征,针对某个物件制作出相应的激励模板,在原始的图像中计算,得到该激励效果图,根据激励的分布,确定目标位置。
制作激励模板就相当于人为地设计一个卷积核,一个比较复杂的卷积核,拿这个卷积核与原图像进行卷积运算得到一幅特征图。比如拿一个静止站立的人的HOG特征形成的卷积核,与原图像的梯度图像进行一个卷积运算,那么目标区域就会被加密。
那么说到这里就会出现一个问题,人在图像中可能有各种的姿态,比如躺着,趴着,坐着等等,我们只用一个静止站立状态的人的激励模板去做探测就会失败。也就是说图像中的物件可能会发生形变,那么我们用固定的激励模板去探测目标物件的时候就不再适用,那么该如何解决这一问题呢,这就引出了局部模板,也就是说,我们不做一个整体的人的激励模板,转而去做人的部分组件的模板,比如头、胳膊、腿等,其实这就是DPM算法。
再概括一下,HOG的特征提取比较死板,一定要是一个人,这个人还只能是特定的姿态比如站立,动作幅度改变不能太大。而DMP就是先检测整个人,再检测四肢,然后综合两者的信息去判断。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号