
Ubuntu环境下实现罗技G29方向盘力回馈
使用Carla工具的过程中公司顺便买了G29方向盘,用了一个月才发现完全没有用到商品宣传里的force feedback 特性。以下描述一下如何在Ubuntu里配置环境:
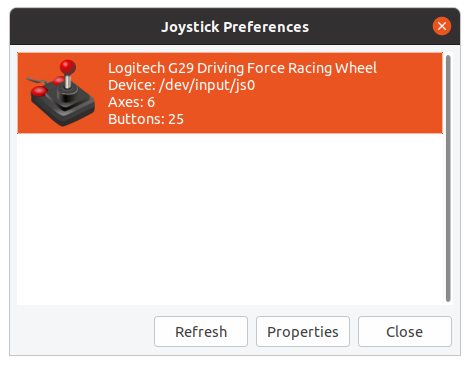
1.首先需要安装驱动jstest-gtk
G29选PS3模式,一切正常的话如下图
p.s. 每次G29上电后会自检(左右旋转到最大角度),如果发现所有按键踏板都正常,只有方向失灵(默认值为极左)记得检查一下是否是变压器接口松了或坏了。
2. 安装ros-g29-force-feedback
kuriatsu/ros-g29-force-feedback: ros package for logicool g29 steering force feedback control (github.com)
readme中对于ros版本的要求是melodic,其实noetic也是同样可用的。
3. 运行
Readme.md中关于Usage的描述有点问题,实际可行的版本如下:
source setup.bash
rosparam load /path/to/catkin_ws/src/g29_force_feedback/config/g29.yaml #如果没起roscore的话另外开个窗口起一下roscore,不然会"Failed to contact master"。另外g29_force_feedback.yaml已经改名g29.yaml放在config文件夹里
rosrun g29_force_feedback g29_force_feedback_node #这里readme有两处错误,package的名字里是_而非- , 另外node 的名字是g29_force_feedback_node 而非node。
引申一下,如何确认可用的ros package: source bash 后 rospack list
如何确认可用的ros node: 查看编译工程中的cmakelist.txt中的target_link_libraries 名字,或者工程中的.launch文件。
p.s. 如果是对油门刹车踏板的力度不满意上淘宝买一下改装的零件。
Enjoy!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律