痞子衡嵌入式:串行NOR Flash的Continuous read模式下软复位后i.MXRT无法启动问题解决方案之RESET#
大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家介绍的是i.MXRT上使能NOR Flash的Continuous read模式在软复位后无法正常启动问题的解决经验。
前一篇文章 《在i.MXRT启动头FDCB里使能串行NOR Flash的Continuous read模式》 里,痞子衡简单介绍了Flash的Continuous read模式作用与意义,并且在MIMXRT1170-EVK上尝试使能了芯成IS25WP128的Continuous read模式做了一次实践(主要是文中第三节FDCB启动头的改动)。
但其实在i.MXRT上使能Flash的Continuous read模式是有点小陷阱的,如果你在App代码里直接插一句 NVIC_SystemReset() 函数的调用,即对主控芯片做一次软复位,你会发现芯片没有从Flash正常启动,这是因为Flash此时仍处于Continuous read模式,这种情况下BootROM有时不能正常配置读取Flash内容去启动App。今天痞子衡就来跟大家探讨解决这个问题。
- 本系列会有多篇文章,每篇文章均从一个核心切入点出发,给出一系列具体实现方案。
- 本系列均以MIMXRT1170-EVK板为示例目标对象,板载Flash型号为芯成IS25WP128(其他i.MXRT芯片和Flash型号下实现流程也差不多,需查看对应数据手册)。
一、解决思路
我们知道无法启动问题是由于主芯片发生软复位但Flash仍处于Continuous read模式造成的,要解决这个问题无非如下三个角度,痞子衡会在后面具体实现方案里按这些角度全部搞一次(如果适用的话)。
- 一、ROM方面不做任何相关处理,但App在调用NVIC_SystemReset()做复位前将Flash先切回到Normal模式;
- 二、App方面不做任何相关处理,对BootROM相关配置做一些调整,让BootROM也能正常处理处于Continuous read模式的Flash;
- 三、ROM和App联合对Flash模式切换做一些特殊处理。
二、核心切入点(借助Flash的硬复位引脚功能)
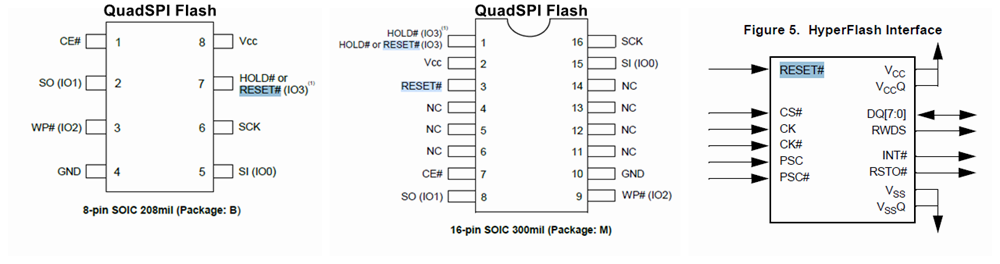
本文找的核心切入点是利用Flash的硬件复位引脚。Flash的硬件复位引脚有两种:一种是独立的,常见于SOIC-16封装上(这种情况下对板级设计有要求,需要在板级设计时将Flash复位引脚连到主芯片i.MXRT的GPIO上);另一种是复用在IO3上的,常用于SOIC-8封装上。
如果是独立的复位引脚(RESET#),则主芯片GPIO直接做拉低操作即可(注意低电平持续时间的要求,详见Flash数据手册);如果是复用的复位引脚(RESET#/IO3),则需要先激活IO3的复位功能,然后做拉低操作。
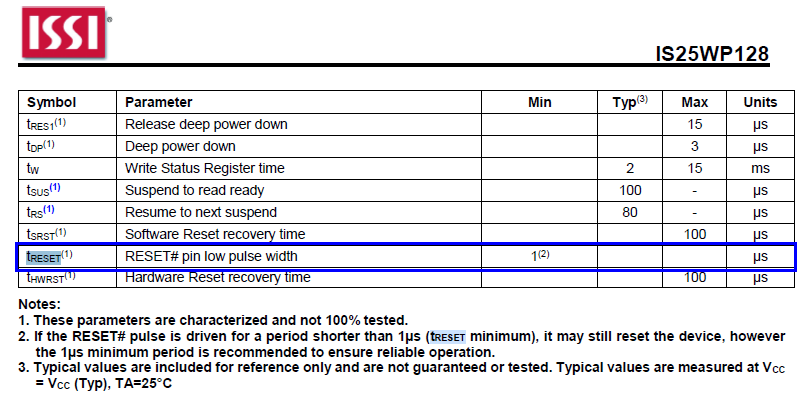
在IS25WP128数据手册里可以找到RESET#信号低电平至少需要持续1us(下表tRESET,如果RESET#低电平持续时间小于1us,也许不会影响Flash器件的复位,但不推荐),Flash进入复位后需要最大100us的恢复时间(下表tHWRST),在恢复期间内对Flash进行读写擦操作并不会生效,因此复位函数里(下文3.2节里的reset_flash_via_pin)最好保证足够的等待时间(这样后续代码里的Flash操作可靠性就得到了保证)。
三、具体实现
本章节描述的方法,如果是在App里(这里均指XIP App)完成,那么App里增加的相关处理代码(注意是执行到的全部代码)需要是 ramfunc 属性(即运行在内部RAM里),这样操作Flash时可以不受限制。此外代码运行前需要把全局中断关掉,防止执行过程中有中断触发,导致Flash里的相关IRQHandler函数被执行。
#if (defined(__ICCARM__))
__ramfunc
#endif
void reset_flash_to_normal(void)
{
__disable_irq();
// 处理代码,使Flash返回到Normal模式
NVIC_SystemReset();
}
3.1 仅ROM方面做相关处理
我们先仅从ROM单方面角度来解决问题,可以先看下痞子衡之前的旧文 《深入i.MXRT1050系列ROM中串行NOR Flash启动初始化流程》 里的2.1节。i.MXRT全系列ROM里关于串行NOR Flash启动流程大同小异。
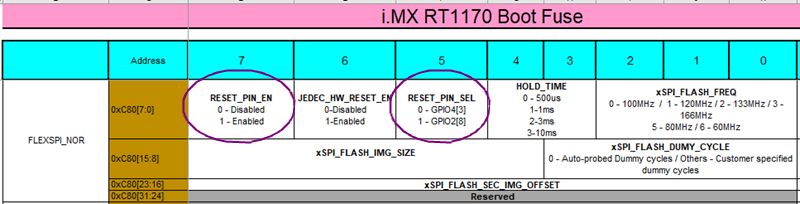
如果要利用ROM里集成的Flash硬件复位功能,则Flash本身必须包含独立的硬件RESET#引脚。本系列示例主芯片i.MXRT1170的fusemap表里关于RESET_PIN的相关定义如下,那么板级设计时Flash RESET#引脚应该连接到GPIO4[3]或者GPIO2[8](根据fuse 0xC80[5]位而定),并且我们还要将fuse 0xC80[7]位烧写为1。
3.2 仅App方面做相关处理
上一小节里的方法先决条件是Flash要包含独立RESET#引脚,但实际客户项目中SOIC-8封装的Flash选择更多。所以我们更多应该在复用的RESET#/IO3引脚上做文章,这就要从App方面的角度来解决问题了。
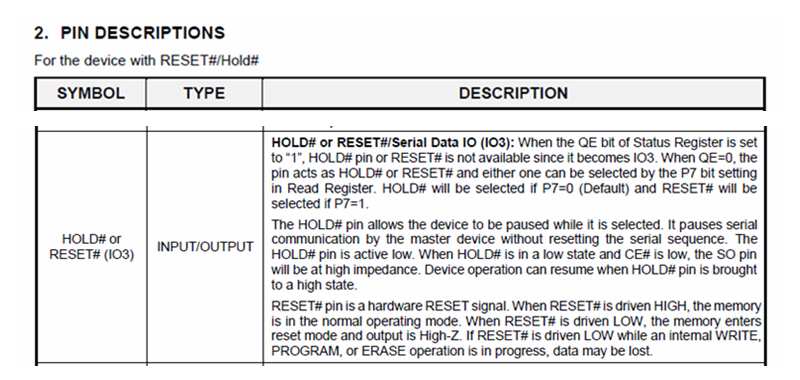
我们先从IS25WP128数据手册看看RESET#/IO3引脚详细功能解释,主要如下两点:
1. IO3引脚仅当QE模式不使能(Flash内部Status Register[6] = 0)的时候,其功能才是HOLD#/RESET#
2. IO3引脚复用功能HOLD#/RESET#由Flash内部Read Register[7]位决定,默认值为0,是HOLD#功能
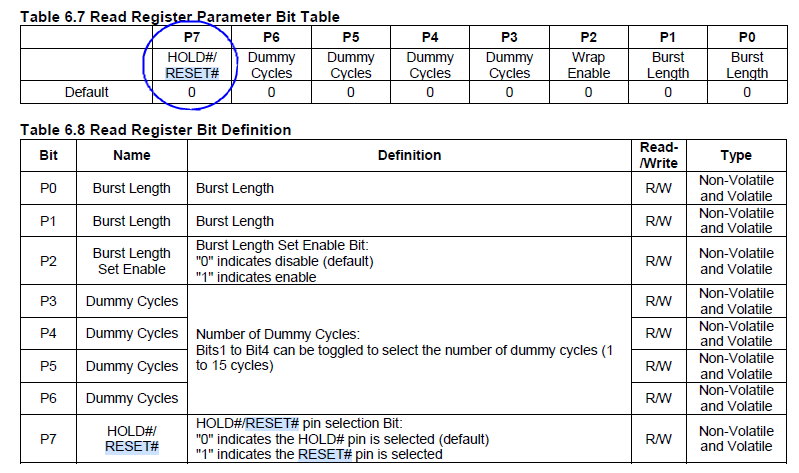
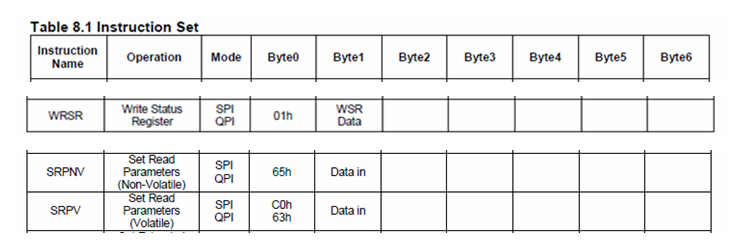
所以 reset_flash_to_normal() 函数里我们需要先设Status Register将Flash切到QE不使能的状态(i.MXRT启动运行App时,Flash应处于QE使能的状态),然后再设Read Register将IO3复位功能指定为RESET#,然后拉低IO3对应的GPIO直到满足复位最小时间要求,最后再将之前改写的Status Register/Read Register全部恢复。过程中主要涉及如下命令:
代码可以基于 \SDK_2.9.1_MIMXRT1170-EVK\boards\evkmimxrt1170\driver_examples\flexspi\nor\polling_transfer\cm7下面的 flexspi_nor_polling_transfer.c 和 flexspi_nor_flash_ops.c,并新增如下代码:
#define NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG 9
#define NOR_CMD_LUT_SEQ_IDX_SETREADPARAM 14
const uint32_t customLUT[CUSTOM_LUT_LENGTH] = {
// ...
/* 原来 Write Status Register */
[4 * NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG] =
FLEXSPI_LUT_SEQ(kFLEXSPI_Command_SDR, kFLEXSPI_1PAD, 0x01, kFLEXSPI_Command_WRITE_SDR, kFLEXSPI_1PAD, 0x04),
// 新增 Set read parameter
[4 * NOR_CMD_LUT_SEQ_IDX_SETREADPARAM] =
FLEXSPI_LUT_SEQ(kFLEXSPI_Command_SDR, kFLEXSPI_1PAD, 0x63, kFLEXSPI_Command_WRITE_SDR, kFLEXSPI_1PAD, 0x04),
};
status_t flexspi_nor_set_flash_register(FLEXSPI_Type *base, uint32_t seqIdx, uint32_t regValue)
{
flexspi_transfer_t flashXfer;
status_t status;
uint32_t writeValue = regValue;
/* Write enable */
status = flexspi_nor_write_enable(base, 0);
if (status != kStatus_Success)
{
return status;
}
flashXfer.deviceAddress = 0;
flashXfer.port = kFLEXSPI_PortA1;
flashXfer.cmdType = kFLEXSPI_Write;
flashXfer.SeqNumber = 1;
flashXfer.seqIndex = seqIdx;
flashXfer.data = &writeValue;
flashXfer.dataSize = 1;
status = FLEXSPI_TransferBlocking(base, &flashXfer);
if (status != kStatus_Success)
{
return status;
}
status = flexspi_nor_wait_bus_busy(base);
/* Do software reset. */
FLEXSPI_SoftwareReset(base);
return status;
}
// MIMXRT1170-EVK上GPIO10[20]引脚连到了Flash的IO3上
void reset_flash_via_pin(void)
{
gpio_pin_config_t gpio_config = {
.direction = kGPIO_DigitalOutput,
.outputLogic = 0U,
.interruptMode = kGPIO_NoIntmode
};
GPIO_PinInit(GPIO10, 20U, &gpio_config);
IOMUXC_SetPinMux(IOMUXC_GPIO_SD_B2_11_GPIO10_IO20, 0U);
// Pin拉高
GPIO_PinWrite(GPIO10, 20U, 1U);
SDK_DelayAtLeastUs(10, SystemCoreClock);
// Pin拉低10us(需持续至少tRESET = 1us时间)
GPIO_PinWrite(GPIO10, 20U, 0U);
SDK_DelayAtLeastUs(10, SystemCoreClock);
// Pin拉高(需持续最大tHWRST = 100us时间)
GPIO_PinWrite(GPIO10, 20U, 1U);
SDK_DelayAtLeastUs(100, SystemCoreClock);
}
void reset_flash_to_normal(void)
{
__disable_irq();
flexspi_nor_flash_init(EXAMPLE_FLEXSPI);
// Disable quad mode.
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG, 0x00);
// Set IO3 pin to Reset func
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_SETREADPARAM, 0x80);
// Drive IO3 to low for at least 1us
reset_flash_via_pin();
// Set back IO3 pin func
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_SETREADPARAM, 0x00);
// Enter quad mode.
flexspi_nor_set_flash_register(EXAMPLE_FLEXSPI, NOR_CMD_LUT_SEQ_IDX_WRITESTATUSREG, 0x40);
NVIC_SystemReset();
}
为了保证上述代码均执行在RAM里,工程链接文件里(以IAR示例)需做如下改动:
initialize by copy { readwrite,
section .textrw,
object fsl_common.o,
object I64DivZer.o,
object I64DivMod.o,
object fsl_gpio.o,
object fsl_flexspi.o,
object flexspi_nor_flash_ops.o,
object flexspi_nor_polling_transfer.o,
section CodeQuickAccess };
3.3 ROM和App联合处理
关于ROM和App联合处理角度,在复位引脚这个切入点上并没有什么优势,此处略去。
至此,i.MXRT上使能NOR Flash的Continuous read模式在软复位后无法正常启动问题的解决经验痞子衡便介绍完毕了,掌声在哪里~~~
欢迎订阅
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。

最后欢迎关注痞子衡个人微信公众号【痞子衡嵌入式】,一个专注嵌入式技术的公众号,跟着痞子衡一起玩转嵌入式。



衡杰(痞子衡),目前就职于恩智浦(NXP)半导体MCU系统应用部门,担任高级嵌入式系统应用工程师。
专栏内所有文章的转载请注明出处:http://www.cnblogs.com/henjay724/
与痞子衡进一步交流或咨询业务合作请发邮件至 hengjie1989@foxmail.com
可以关注痞子衡的Github主页 https://github.com/JayHeng,有很多好玩的嵌入式项目。
关于专栏文章有任何疑问请直接在博客下面留言,痞子衡会及时回复免费(划重点)答疑。
痞子衡邮箱已被私信挤爆,技术问题不推荐私信,坚持私信请先扫码付款(5元起步)再发。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号