

『TensorFlow × MXNet』SSD项目复现经验
『TensorFlow』SSD源码学习_其一:论文及开源项目文档介绍
『TensorFlow』SSD源码学习_其二:基于VGG的SSD网络前向架构
『TensorFlow』SSD源码学习_其四:数据介绍及TFR文件生成
『TensorFlow』SSD源码学习_其五:TFR数据读取&数据预处理
为了加深理解,我对SSD项目进行了复现,基于原版,有按照自己理解的修改,
项目见github:SSD_Realization_TensorFlow、SSD_Realization_MXNet
构建思路按照训练主函数的步骤顺序,文末贴了出来,下面我们按照这个顺序简要介绍一下各个流程的重点,想要详细了解的建议看一看之前的解读源码的对应篇章(tf),或者看看李沐博士的ssd介绍视频(虽然不太详细,不过结合讲义思路很清晰,参见:『MXNet』第十弹_物体检测SSD)。
一、重点说明
SSD架构主要有四个部分,网络设计、搜索框设计、学习目标处理、损失函数实现。
网络设计
重点在于正常前向网络中挑选出的特征层分别添加两个卷积出口:分类和回归出口,用于对应后面的每个搜索框的各个类别得分、以及4个坐标值。
搜索框设计
对应网络的特征层:每个层有若干搜索框,我们需要搜索框位置形状信息。对于tf版本我们保存了每个框的中心点以及HW信息,而mx版本我们保存的是左上右下两个的4个坐标数值,mx更为直观,但是tf版本节省空间:一组框对应同一个中心点,不过搜索框信息量不大,b无伤大雅。
学习目标处理
个人感觉最为繁琐,我们需要的的信息包含(此时已经获得了):一组搜索框(实际上指的是全部搜索框的n4个坐标值),图片的label、图片的真实框坐标(对应label数目4),我们需要的就是找到搜索框和真是图片的标签联系,
获取:
每个搜索框对应的分类(和哪个真实框的IOU最大就选真实框的类别标注给该搜索,也就是说会出现大量的0 class搜索框)
每个搜索框的坐标的回归目标(同上的寻找方法,空位也为0)
负类掩码,虽然每张图片里面通常只有几个标注的边框,但SSD会生成大量的锚框。可以想象很多锚框都不会框住感兴趣的物体,就是说跟任何对应感兴趣物体的表框的IoU都小于某个阈值。这样就会产生大量的负类锚框,或者说对应标号为0的锚框。对于这类锚框有两点要考虑的:
1、边框预测的损失函数不应该包括负类锚框,因为它们并没有对应的真实边框
2、因为负类锚框数目可能远多于其他,我们可以只保留其中的一些。而且是保留那些目前预测最不确信它是负类的,就是对类0预测值排序,选取数值最小的哪一些困难的负类锚框
所以需要使用掩码,抑制一部分计算出来的loss。
损失函数
可讲的不多,按照公式实现即可,重点也在上一步计算出来的掩码处理损失函数值一步。
二、MXNet训练主函数
if __name__ == '__main__':
batch_size = 4
ctx = mx.cpu(0)
# ctx = mx.gpu(0)
# box_metric = mx.MAE()
cls_metric = mx.metric.Accuracy()
ssd = ssd_mx.SSDNet()
ssd.initialize(ctx=ctx) # mx.init.Xavier(magnitude=2)
cls_loss = util_mx.FocalLoss()
box_loss = util_mx.SmoothL1Loss()
trainer = mx.gluon.Trainer(ssd.collect_params(),
'sgd', {'learning_rate': 0.01, 'wd': 5e-4})
data = get_iterators(data_shape=304, batch_size=batch_size)
for epoch in range(30):
# reset data iterators and metrics
data.reset()
cls_metric.reset()
# box_metric.reset()
tic = time.time()
for i, batch in enumerate(data):
start_time = time.time()
x = batch.data[0].as_in_context(ctx)
y = batch.label[0].as_in_context(ctx)
# 将-1占位符改为背景标签0,对应坐标框记录为[0,0,0,0]
y = nd.where(y < 0, nd.zeros_like(y), y)
with mx.autograd.record():
# anchors, 检测框坐标,[1,n,4]
# class_preds, 各图片各检测框分类情况,[bs,n,num_cls + 1]
# box_preds, 各图片检测框坐标预测情况,[bs, n * 4]
anchors, class_preds, box_preds = ssd(x, True)
# box_target, 检测框的收敛目标,[bs, n * 4]
# box_mask, 隐藏不需要的背景类,[bs, n * 4]
# cls_target, 记录全检测框的真实类别,[bs,n]
box_target, box_mask, cls_target = ssd_mx.training_targets(anchors, class_preds, y)
loss1 = cls_loss(class_preds, cls_target)
loss2 = box_loss(box_preds, box_target, box_mask)
loss = loss1 + loss2
loss.backward()
trainer.step(batch_size)
if i % 1 == 0:
duration = time.time() - start_time
examples_per_sec = batch_size / duration
sec_per_batch = float(duration)
format_str = "[*] step %d, loss=%.2f (%.1f examples/sec; %.3f sec/batch)"
print(format_str % (i, nd.sum(loss).asscalar(), examples_per_sec, sec_per_batch))
if i % 500 == 0:
ssd.model.save_parameters('model_mx_{}.params'.format(epoch))
三、TensorFlow训练主函数
def main():
max_steps = 1500
batch_size = 32
adam_beta1 = 0.9
adam_beta2 = 0.999
opt_epsilon = 1.0
num_epochs_per_decay = 2.0
num_samples_per_epoch = 17125
moving_average_decay = None
tf.logging.set_verbosity(tf.logging.DEBUG)
with tf.Graph().as_default():
# Create global_step.
with tf.device("/device:CPU:0"):
global_step = tf.train.create_global_step()
ssd = SSDNet()
ssd_anchors = ssd.anchors
# tfr解析操作放在GPU下有加速,效果不稳定
dataset = \
tfr_data_process.get_split('./TFR_Data',
'voc2012_*.tfrecord',
num_classes=21,
num_samples=num_samples_per_epoch)
with tf.device("/device:CPU:0"): # 仅CPU支持队列操作
image, glabels, gbboxes = \
tfr_data_process.tfr_read(dataset)
image, glabels, gbboxes = \
preprocess_img_tf.preprocess_image(image, glabels, gbboxes, out_shape=(300, 300))
gclasses, glocalisations, gscores = \
ssd.bboxes_encode(glabels, gbboxes, ssd_anchors)
batch_shape = [1] + [len(ssd_anchors)] * 3 # (1,f层,f层,f层)
# Training batches and queue.
r = tf.train.batch( # 图片,中心点类别,真实框坐标,得分
util_tf.reshape_list([image, gclasses, glocalisations, gscores]),
batch_size=batch_size,
num_threads=4,
capacity=5 * batch_size)
batch_queue = slim.prefetch_queue.prefetch_queue(
r, # <-----输入格式实际上并不需要调整
capacity=2 * 1)
# Dequeue batch.
b_image, b_gclasses, b_glocalisations, b_gscores = \
util_tf.reshape_list(batch_queue.dequeue(), batch_shape) # 重整list
predictions, localisations, logits, end_points = \
ssd.net(b_image, is_training=True, weight_decay=0.00004)
ssd.losses(logits, localisations,
b_gclasses, b_glocalisations, b_gscores,
match_threshold=.5,
negative_ratio=3,
alpha=1,
label_smoothing=.0)
update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS)
# =================================================================== #
# Configure the moving averages.
# =================================================================== #
if moving_average_decay:
moving_average_variables = slim.get_model_variables()
variable_averages = tf.train.ExponentialMovingAverage(
moving_average_decay, global_step)
else:
moving_average_variables, variable_averages = None, None
# =================================================================== #
# Configure the optimization procedure.
# =================================================================== #
with tf.device("/device:CPU:0"): # learning_rate节点使用CPU(不明)
decay_steps = int(num_samples_per_epoch / batch_size * num_epochs_per_decay)
learning_rate = tf.train.exponential_decay(0.01,
global_step,
decay_steps,
0.94, # learning_rate_decay_factor,
staircase=True,
name='exponential_decay_learning_rate')
optimizer = tf.train.AdamOptimizer(
learning_rate,
beta1=adam_beta1,
beta2=adam_beta2,
epsilon=opt_epsilon)
tf.summary.scalar('learning_rate', learning_rate)
if moving_average_decay:
# Update ops executed locally by trainer.
update_ops.append(variable_averages.apply(moving_average_variables))
# Variables to train.
trainable_scopes = None
if trainable_scopes is None:
variables_to_train = tf.trainable_variables()
else:
scopes = [scope.strip() for scope in trainable_scopes.split(',')]
variables_to_train = []
for scope in scopes:
variables = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope)
variables_to_train.extend(variables)
losses = tf.get_collection(tf.GraphKeys.LOSSES)
regularization_losses = tf.get_collection(
tf.GraphKeys.REGULARIZATION_LOSSES)
regularization_loss = tf.add_n(regularization_losses)
loss = tf.add_n(losses)
tf.summary.scalar("loss", loss)
tf.summary.scalar("regularization_loss", regularization_loss)
grad = optimizer.compute_gradients(loss, var_list=variables_to_train)
grad_updates = optimizer.apply_gradients(grad,
global_step=global_step)
update_ops.append(grad_updates)
# update_op = tf.group(*update_ops)
with tf.control_dependencies(update_ops):
total_loss = tf.add_n([loss, regularization_loss])
tf.summary.scalar("total_loss", total_loss)
# =================================================================== #
# Kicks off the training.
# =================================================================== #
gpu_options = tf.GPUOptions(per_process_gpu_memory_fraction=0.8)
config = tf.ConfigProto(log_device_placement=False,
gpu_options=gpu_options)
saver = tf.train.Saver(max_to_keep=5,
keep_checkpoint_every_n_hours=1.0,
write_version=2,
pad_step_number=False)
if True:
import os
import time
print('start......')
model_path = './logs'
batch_size = batch_size
with tf.Session(config=config) as sess:
summary = tf.summary.merge_all()
coord = tf.train.Coordinator()
threads = tf.train.start_queue_runners(sess=sess, coord=coord)
writer = tf.summary.FileWriter(model_path, sess.graph)
init_op = tf.group(tf.global_variables_initializer(),
tf.local_variables_initializer())
init_op.run()
for step in range(max_steps):
start_time = time.time()
loss_value = sess.run(total_loss)
# loss_value, summary_str = sess.run([train_tensor, summary_op])
# writer.add_summary(summary_str, step)
duration = time.time() - start_time
if step % 10 == 0:
summary_str = sess.run(summary)
writer.add_summary(summary_str, step)
examples_per_sec = batch_size / duration
sec_per_batch = float(duration)
format_str = "[*] step %d, loss=%.2f (%.1f examples/sec; %.3f sec/batch)"
print(format_str % (step, loss_value, examples_per_sec, sec_per_batch))
# if step % 100 == 0:
# accuracy_step = test_cifar10(sess, training=False)
# acc.append('{:.3f}'.format(accuracy_step))
# print(acc)
if step % 500 == 0 and step != 0:
saver.save(sess, os.path.join(model_path, "ssd_tf.model"), global_step=step)
coord.request_stop()
coord.join(threads)
TensorFlow版本我训练了5w轮,损失函数如下,
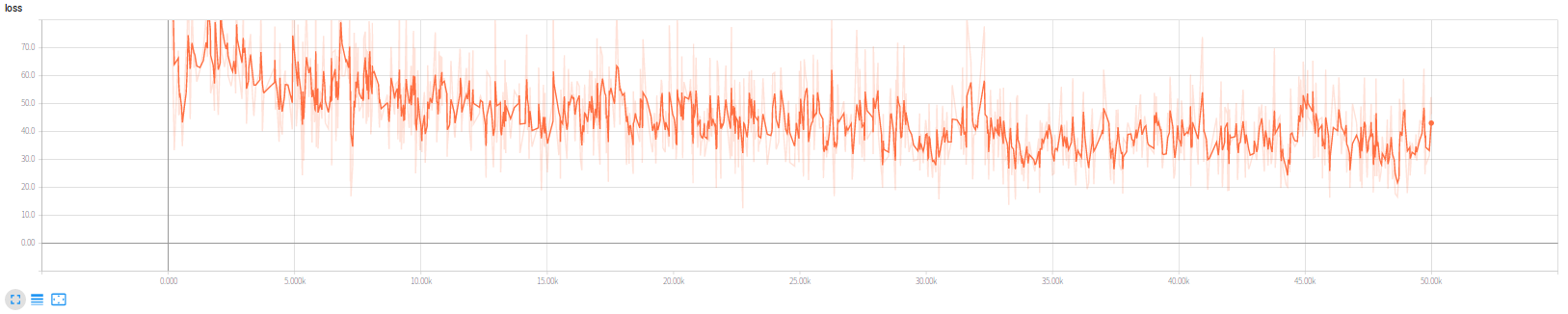
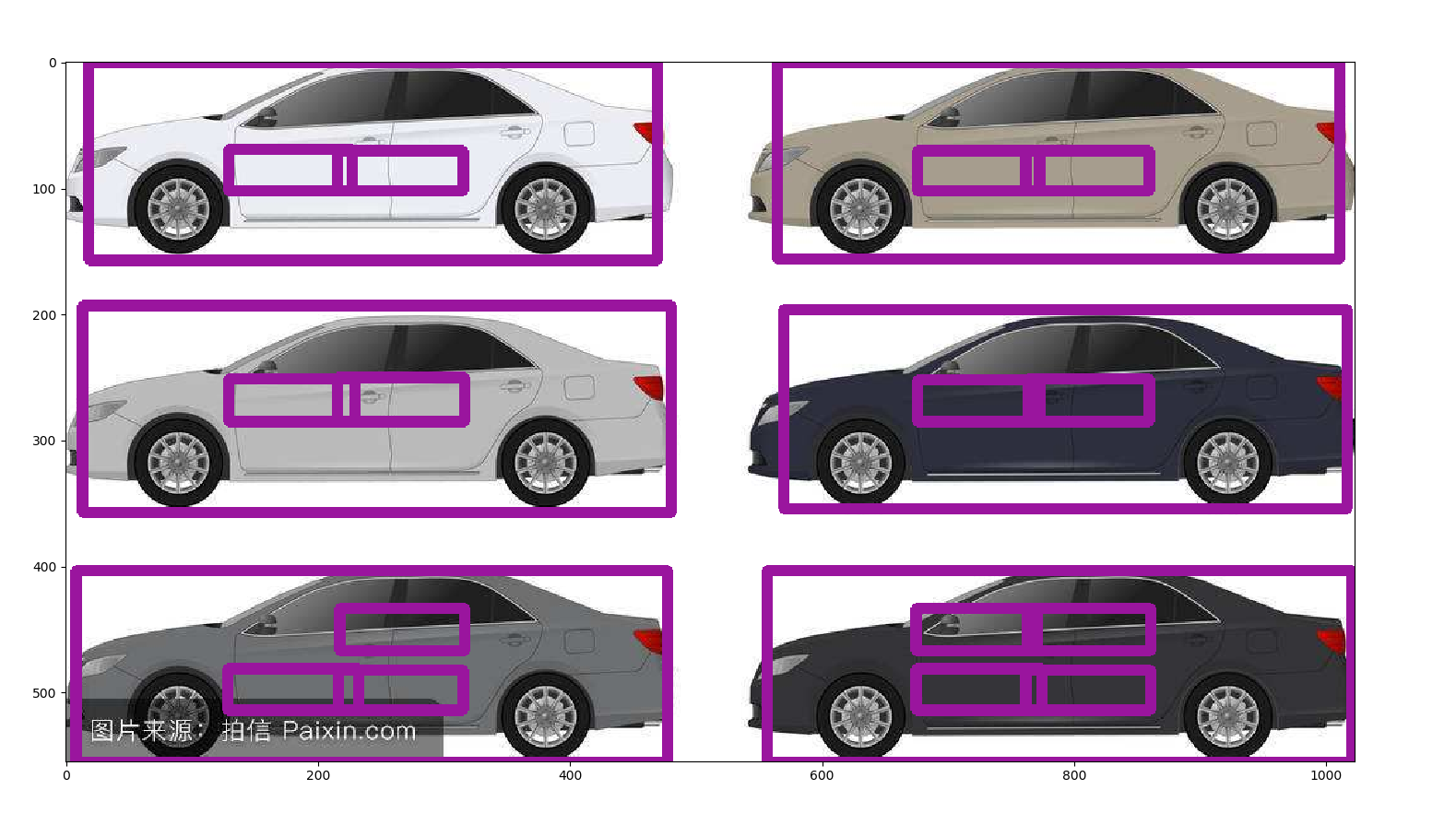
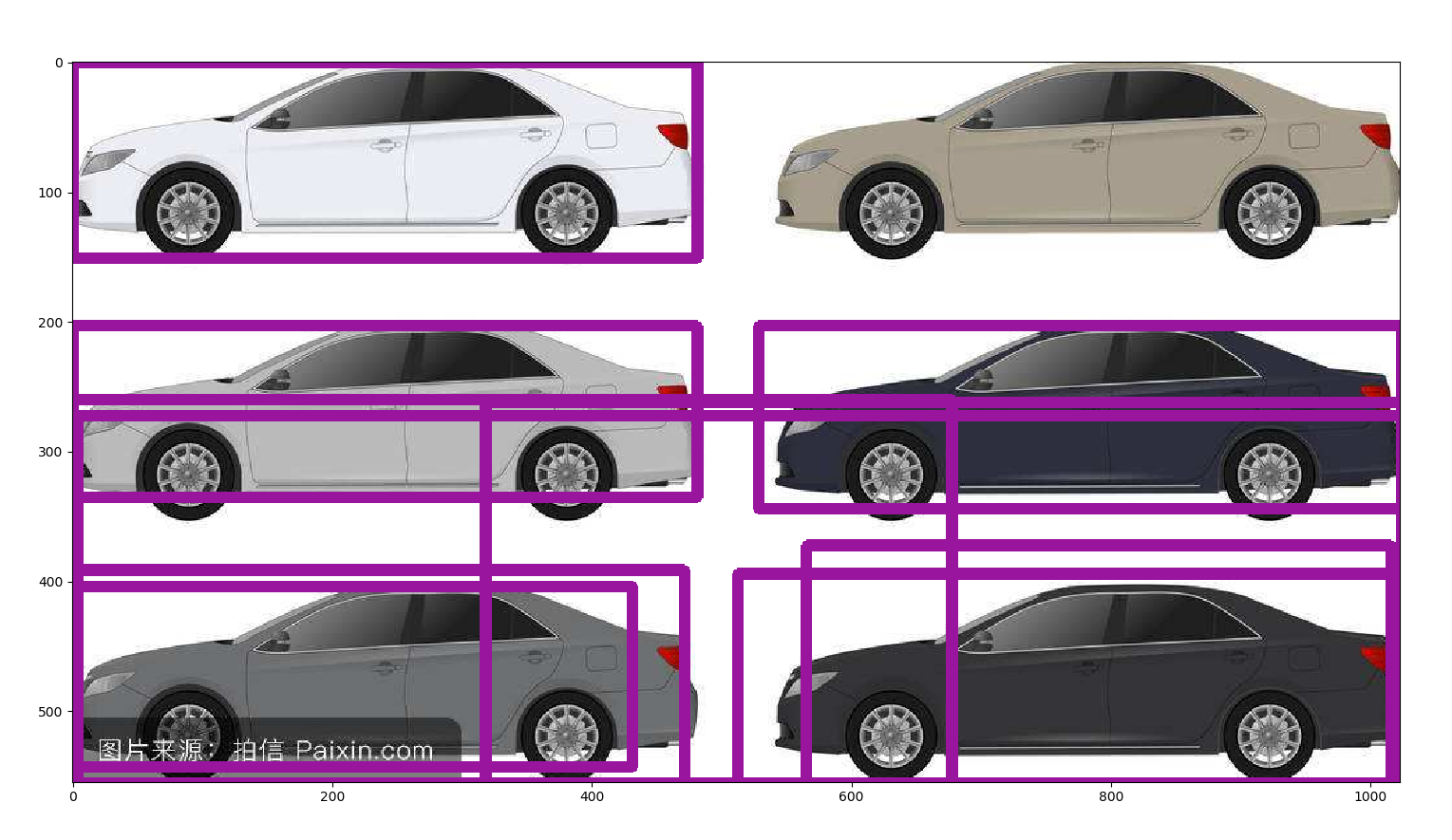
实际上次数不太够,第一幅图是原开源代码放出的训练模型的检测结果,第二幅图是训练5w次的我的版本的结果,可见训练次数仍然不太够(更新,后经分析,图二效果差原因更大是因为非极大值抑制阈值设置过高,改小的话实际上只有一辆车没有检测出来,其他的都很正常)。
实验室的电脑显卡够快(1080Ti),不过散热实在成问题,跑5w次很不容易了,经常重启,所以差不多就这样了,不做更多次数的训练尝试了。
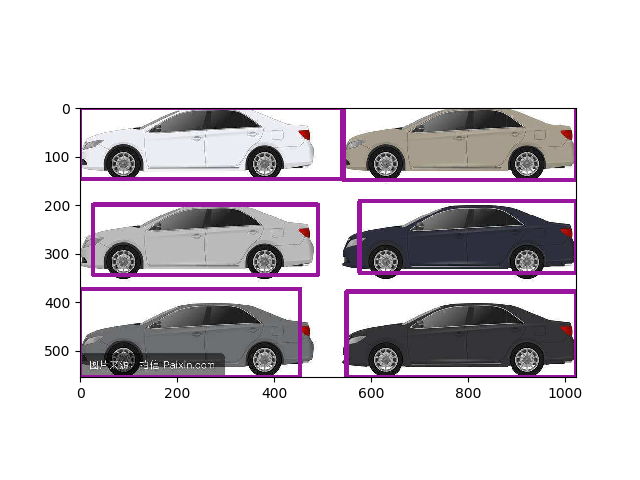
更新,这次设定了20w次训练,实际到17w多次过热重启了,采用最新的模型,并修改了NMS阈值为0.5,检测成功:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号