
CVPR 2019文章
目前大多数设计高精度网络结构的工作通常采用FLOP来评估网络的复杂度。但是仅仅FLOP指标不能真正决定实际的推理速度。比如说,在硬件和软件高度优化的Nvidia GPU上,3x3的卷积的FLOPs是1x1卷积的9倍,但是速度上却不是9倍。另外一个决定推理速度的是内存的访问( memory access)。而且,考虑到硬件和软件的多样性,我们无法找出同一个网络结构在所有的平台上都是最优的。
在实际真实的场景中,部署深度神经网络时,在目标平台上达到一个速度与精度的平衡是非常重要的。然而目前大多数现有的自动结构搜索只关注于高精度。在本文中,我们提出一个较好的速度与精度折中的搜索出来的网络,称为“ Partial Order Pruning”。
It prunes the architecture search space with a partial order assumption to automatically search for the architectures with the best speed and accuracy trade-off. Our algorithm explicitly takes profile information about the inference speed on the target platform into consideration.
本文目标是回答两个问题:
-
给定最大可接受的延迟( latency)下,我们可以达到的最高精度是什么?
-
符合确定的精度要求下,我们可以期望的最低推理延迟是多少?
本文的贡献:
-
我们是第一批研究网络结构搜索的速度和精度平衡问题的人。通过对搜索空间进行偏序剪枝(Partial Order),我们的“偏序剪枝”可以有效地提高搜索速度和精度的权衡。
-
我们提出了若干种在嵌入式设备TX2上达到高精度和快推理速度的DF网络。在ImageNet验证集上,我们的DF1和DF2A网络的准确率超过了ResNet18/50,并且推理延迟分别降低了43%和39%。
-
我们将提出的算法应用于搜索一个分割网络的解码器架构。使用DF主干网络,我们在GPU端和嵌入式端TX2上都达到了实时并且state-of-the-art的效果。在GTX 1080Ti上,DF1-Seg网络在2014*2048的分辨率下,达到106.4FPS,mIoU 74.1%的效果;在TX2上,DF1-Seg网络在1280*720(720p)的分辨率下达到21.8FPS。
搜索空间(Search Space)
本文在搜索空间(search space)中提供一个通用的网络架构,如下图Figure2.
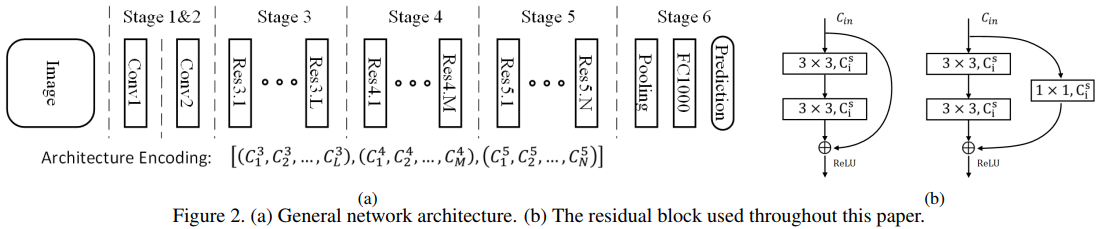
这个通用的网络结构包含6个stage,stage1~5中各自有一个stride=2的下采样,stage6使用一个全局平局池化( global average pooling)和全连接层来得到最终的预测结构。stage1和2负责在大分辨率下提取低层的特征,但是这部分的计算量比较大。由于我们是要得到一个搞笑的网络,因此我们在stage1和2中只使用1个卷积层,如Conv1和Conv2,我们发现这种情况下也可以达到很好的精度。对于stage3,4,5,每个stage依次包含L,M,N个residual block,其中L,M,N是整数。不同的L,M,N,可以得到不同的网络深度。第s个stage的第i个residual block的宽度(即通道数)记为![]() ,其中
,其中![]() 。依照经验,我们设定后面block的宽度需要大于等于前面block的宽度。我们使用的residual block(即与ResNet中的一致)示意图如Figure2(b)所示。如果输入的尺寸与输出的不匹配,那么会加一个额外的投影层(projection layer)。另外,所有卷积层后面跟着batch normalization层和ReLU激活函数。
。依照经验,我们设定后面block的宽度需要大于等于前面block的宽度。我们使用的residual block(即与ResNet中的一致)示意图如Figure2(b)所示。如果输入的尺寸与输出的不匹配,那么会加一个额外的投影层(projection layer)。另外,所有卷积层后面跟着batch normalization层和ReLU激活函数。
 ,其中
,其中 。依照经验,我们设定后面block的宽度需要大于等于前面block的宽度。我们使用的residual block(即与ResNet中的一致)示意图如Figure2(b)所示。如果输入的尺寸与输出的不匹配,那么会加一个额外的投影层(projection layer)。另外,所有卷积层后面跟着batch normalization层和ReLU激活函数。
。依照经验,我们设定后面block的宽度需要大于等于前面block的宽度。我们使用的residual block(即与ResNet中的一致)示意图如Figure2(b)所示。如果输入的尺寸与输出的不匹配,那么会加一个额外的投影层(projection layer)。另外,所有卷积层后面跟着batch normalization层和ReLU激活函数。延时估计(Latency Estimation)
不同的深度(block的数量)和不同的宽度(每个block的通道数)组成了所有可能的结构。这些所有的网络结构的时间分布可能是非常短的时间到正无穷。但是我们只关心延迟在特定范围内(即延时大于Tmin,小于Tmax)的网络结构。我们使用TensorRT库提供的分析器来获取网络层级别的延迟。我们发现一个具有相同配置(如输入输入的尺寸)的block的延迟也是一样的。因此我们构造了查找表![]() ,当一个block的输入输出的通道数(ci/co),宽高(hi/wi/ho/wo)确定时,我们就可以得到该block的延时Latency。比如,在TX2上,
,当一个block的输入输出的通道数(ci/co),宽高(hi/wi/ho/wo)确定时,我们就可以得到该block的延时Latency。比如,在TX2上,![]() 。
。
 ,当一个block的输入输出的通道数(ci/co),宽高(hi/wi/ho/wo)确定时,我们就可以得到该block的延时Latency。比如,在TX2上,
,当一个block的输入输出的通道数(ci/co),宽高(hi/wi/ho/wo)确定时,我们就可以得到该block的延时Latency。比如,在TX2上, 。
。通过简单地总结所有block的延迟,我们可以有效地估计一个网络结构x的延迟Lat(x)。我们选择那些延迟大于Tmin,小于Tmax的网络结构进行下一步分析。
偏序假设(Partial Order Assumption)
偏序(partial order)是定义在一个集合上的二元关系。它意味着集合里某些元素对(x,y),一个元素x先于其他y的排序,用x < y 表示。这里,“partial”表明并不是所有元素对需要具有可比性。
在本文的搜索空间中的网络结构中也存在这种偏序(partial order)关系。本文网络结构中的偏序关系如下图Figure 4所示。
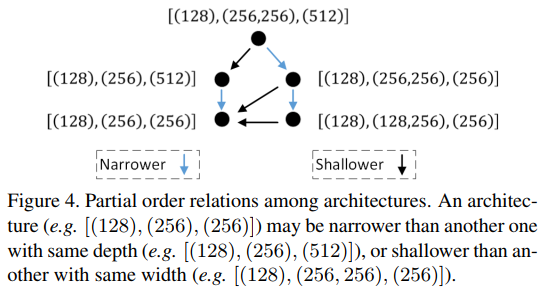
如果x与y的宽度相同,但是x比y更浅( shallower),或者如果x与y深度相同,但是x比y更窄( narrower),那么借助上述的理论,我们就可以说在顺序上x在y的前面,记为x<y。
网络结构x的准确率和延迟分别用Acc(x)和Lat(x)表示,那么当x < y时,有

上述公式(1)假设在顺序上当x在y的前面时,x的准确率和延迟均低于y。这个假设可能对非常深的网络(如具体上百层的网络)不成立,但是本文中由于使用的是小网络,作者实验后是满足上述假设的。
Partial Order Pruning
本文的网络结构搜索算法的目标是:在每一个非常小的延迟范围[T, T + δt]内,找出最高准确率的那个网络结构。

其中, δt是一个很短的时间范围,比如是0.1ms。
本文搜索算法如下:
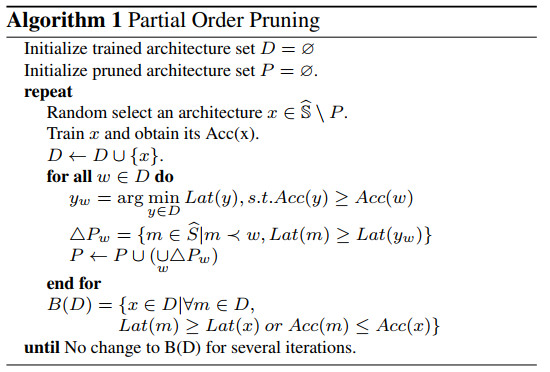
其中,![]() 表示延迟在[Tmin, Tmax]之间的网络结构集合。
表示延迟在[Tmin, Tmax]之间的网络结构集合。
 表示延迟在[Tmin, Tmax]之间的网络结构集合。
表示延迟在[Tmin, Tmax]之间的网络结构集合。这部分的细节请查看原始paper。
实验部分
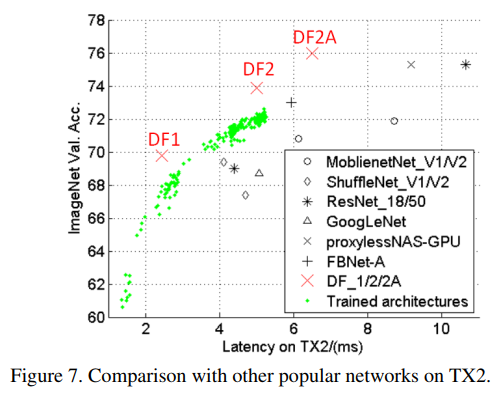
本文在 Nvidia Jetson TX2和GTX 1080Ti这两个硬件平台上进行实验。
作者训练了200多个网络,实验结果如下图Figure 7所示。在整体训练结束后,取出两个限制条件下最优的结构重新训练,获得最高精度,即下图中的DF1和DF2。将DF2中的basic block替换成bottleneck block后,即为网络DF2A。
本文搜索出来的DF系列的网络结构如下:
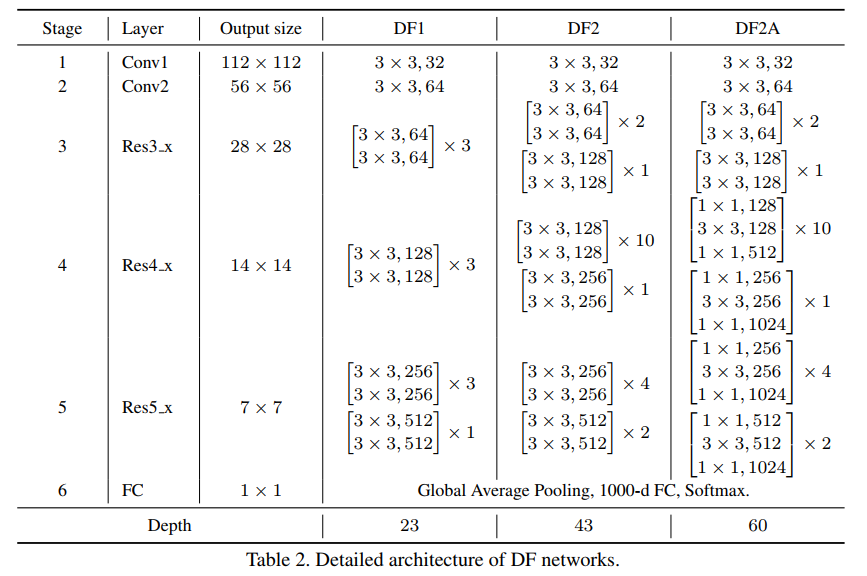
下面的Table1表格展示了本文搜索出来的网络与热门网络的对比。

从上面的表格中可以看出:
-
相比于ResNet-18和GoogLeNet,DF1准确率高了69.8%,但是推理时间比前者分别少了43%和51%;
-
DF2与ResNet-18和GoogLeNet相比,推理时间差不多,但是准确率高了4.9%和5.2%。
-
DF2A比ResNet-50精度高一些,推荐时间也快了不少。
-
相比于MobileNet和ShuffleNet网络,这两个网络虽然FLOPs低,但是这两个网络得出推理时间却比本文提出的DF1要长。这是因为这两个网络具有更高的内存访问消耗( memory access cost)。这说明仅仅FLOPs并不能决定实际在具体运行平台上的推理速度。
-
相比于其他采用NAS方法得到的模型,如NASNet和PNASNet,这两个模型的具有很高的延迟;相比于FBNet和ProxylessNAS,虽然这两个模型在搜索时也将平台相关因素考虑在内,但是延迟仍然比DF网络高,DF网络具有更好的速度/精度的折中。这是因此(a)DF网络是专门在TX2平台搜索得到的;(b)FBNet和ProxylessNAS使用了 inverted bottleneck模块,这个模型会带来更高的内存访问消耗。(c)FBNet和ProxylessNAS的目标是寻找更好的构建块的架构,但是我们更注重平衡整体架构的宽度和深度。
基于我们搜索结果,我们观察到如下几点:
-
在早期阶段采用非常快的下采样,可以获得更高的效率。因此我们在第1和第2阶段都只使用了一个卷积层,而且也可以达到一个好的精度。
-
带下采样的卷积层比池化层更好一些,可以得到更高的精度。我们最终只在网络的最后使用1个全局平均池化层( global average pooling)
-
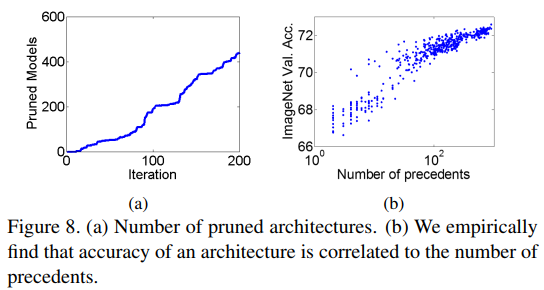
如Figure8(b)可以看出,一个网络的前序越多,其精度也越高,也会有一个更好的深度与宽度的平衡。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号