
从 SGD 到 Adam —— 常见优化算法总结
1 概览
虽然梯度下降优化算法越来越受欢迎,但通常作为黑盒优化器使用,因此很难对其优点和缺点的进行实际的解释。本文旨在让读者对不同的算法有直观的认识,以帮助读者使用这些算法。在本综述中,我们介绍梯度下降的不同变形形式,总结这些算法面临的挑战,介绍最常用的优化算法,回顾并行和分布式架构,以及调研用于优化梯度下降的其他的策略。
2 Gradient descent 变体
有3种基于梯度下降的方法,主要区别是我们在计算目标函数( objective function)梯度时所使用的的数据量。
2.1 Batch gradient descent 批梯度下降法
计算公式如下:
其中η表示学习率。
该方法在一次参数更新时,需要计算整个数据集的参数。
优点:可以保证在convex error surfaces 条件下取得全局最小值,在non-convex surfaces条件下取得局部极小值。
缺点:由于要计算整个数据集的梯度,因此计算比较慢,当数据量很大时,可能会造成内存不足。另外,该方法也无法在线(online)更新模型。
计算的伪代码如下:
for i in range ( nb_epochs ): params_grad = evaluate_gradient ( loss_function , data , params ) params = params - learning_rate * params_grad
其中,params和params_grad均是向量(vector)。
2.2 Stochastic gradient descent(SGD) 随机梯度下降
计算公式如下:

随机梯度下降法每次更新参数时,只计算一个训练样本(x(i), y(i))的梯度。
优点:计算速度快,可以用于在线更新模型。
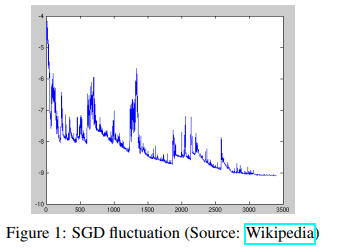
缺点:由于每次只根据一个样本进行计算梯度,因此最终目标函数收敛时曲线波动可能会比较大。 由于SGD的波动性,一方面,波动性使得SGD可以跳到新的和潜在更好的局部最优。另一方面,这使得最终收敛到特定最小值的过程变得复杂,因为SGD会一直持续波动。
然而,已经证明当我们缓慢减小学习率,SGD与批梯度下降法具有相同的收敛行为,对于非凸优化和凸优化,可以分别收敛到局部最小值和全局最小值。
示例代码如下:
for i in range(nb_epochs): np.random.shuffle(data) for example in data: params_grad = evaluate_gradient(loss_function, example, params) params = params - learning_rate * params_grad
注:每次循环中,我们需要先将样本打乱。
2.3 Mini-batch gradient descent
小批量梯度下降法结合了上述两种方法的优点,在每次跟新参数时使用小批量(n个样本)的训练样本。

优点:1)减少了参数更新时的方差,也就是目标函数收敛时的曲线波动没那么大了,这样也得到更加稳定的收敛结果。
2)可以利用最新的深度学习库中高度优化的矩阵优化方法,高效地求解每个小批量数据的梯度。
小批量数据n的大小在50到256之间,也可以根据不同的应用有所变化。
当训练神经网络模型时,小批量梯度下降法是典型的选择算法,当使用小批量梯度下降法时,也将其称为SGD。
注意:在下文的改进的SGD中,为了简单,我们省略了参数。
示例代码如下:
for i in range(nb_epochs): np.random.shuffle(data) for batch in get_batches(data, batch_size=50): params_grad = evaluate_gradient(loss_function, batch, params) params = params - learning_rate * params_grad
3 Challenges
mini-batch梯度下降法虽然有上述的优点,但是仍然还是有一些问题:
1)选择一个合适的学习率比较困难。学习率太小会导致收敛缓慢,学习率太大会损失函数在最小值附近波动甚至无法收敛。
2)学习率调整( Learning rate schedules)在训练时,根据预定义的策略(如目标函数的相邻迭代之间的下降值小于阈值时)减少学习率。这种方法需要提前设置好策略和阈值,而且可能无法适应数据集的特点。
3)所有参数的更新使用同一个学习率。如果我们的数据是稀疏的,同时特征的频率差异很大,我们可能不想使用同样的学习率更新所有的的参数,对于那些出现次数较少的特性,我们对其使用更大的学习率。
4)非凸误差函数普遍出现在神经网络中,在优化这类函数时,其中一个挑战就是使函数避免陷入次优的局部最小值。 Dauphin等人指出出现这种困难实际上并不是来自局部最小值,而是来自鞍点,即那些在一个维度上是递增的,而在另一个维度上是递减的。这些鞍点通常被具有相同误差的点包围,因为在任意维度上的梯度都近似为0,所以SGD很难从这些鞍点中逃开。
4 Gradient descent optimization algorithms
下面我们将介绍一些在深度学习中广泛使用的优化算法,来解决上述提到的问题。我们不会讨论实际中不适合高维数据集中计算的算法,如牛顿法的二阶方法。
4.1 Momentum 动量法
动量法改进自SGD算法,让每一次的参数更新方向不仅仅取决于当前位置的梯度,还受到上一次参数更新方向的影响。
SGD很难通过陡谷(指在一个维度上的表面弯曲程度远大于其他维度的区域),这种情况通常出现在局部最优点附近。 在这种情况下,SGD摇摆地通过陡谷的斜坡,同时,沿着底部到局部最优点的路径上只是缓慢地前进,这个过程如图2a所示。
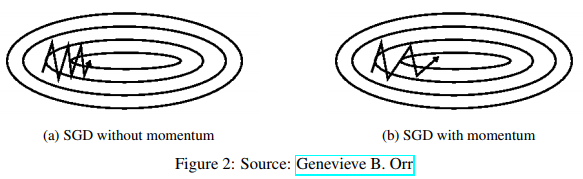
如图2b所示,动量法[16]是一种帮助SGD在相关方向上加速并抑制摇摆的一种方法。动量法将历史步长的更新向量的一个分量增加到当前的更新向量中(部分实现中交换了公式中的符号)
公式如下:

其中,动量项γ一般取值为0.9或者类似的值。
从本质上说,动量法,就像我们从山上推下一个球,球在滚下来的过程中累积动量,变得越来越快(直到达到终极速度,如果有空气阻力的存在,则γ<1)。同样的事情也发生在参数的更新过程中:对于在梯度点处具有相同的方向的维度,其动量项增大,对于在梯度点处改变方向的维度,其动量项减小。因此,我们可以得到更快的收敛速度,同时可以减少摇摆。
4.2 Nesterov accelerated gradient (NAG)
NAG是在Momentum的基础上改进的。 NAG就对Momentum说:“既然我都知道我这一次一定会走![]()
![]() 的量,那么我何必还用现在这个位置的梯度呢?我直接先走到
的量,那么我何必还用现在这个位置的梯度呢?我直接先走到![]()
![]() 之后的地方,然后再根据那里的梯度再前进一下,岂不美哉?”所以就有了下面的公式:
之后的地方,然后再根据那里的梯度再前进一下,岂不美哉?”所以就有了下面的公式:
 的量,那么我何必还用现在这个位置的梯度呢?我直接先走到之后的地方,然后再根据那里的梯度再前进一下,岂不美哉?”所以就有了下面的公式:
的量,那么我何必还用现在这个位置的梯度呢?我直接先走到之后的地方,然后再根据那里的梯度再前进一下,岂不美哉?”所以就有了下面的公式:
跟上面Momentum公式的唯一区别在于,梯度不是根据当前参数位置θ,而是根据先走了本来计划要走的一步后,达到的参数位置![]()
![]() 计算出来的。
计算出来的。
 计算出来的。
计算出来的。对于这个改动,很多文章给出的解释是,能够让算法提前看到前方的地形梯度,如果前面的梯度比当前位置的梯度大,那我就可以把步子迈得比原来大一些,如果前面的梯度比现在的梯度小,那我就可以把步子迈得小一些。这个大一些、小一些,都是相对于原来不看前方梯度、只看当前位置梯度的情况来说的。
但是我个人对这个解释不甚满意。你说你可以提前看到,但是我下次到了那里之后不也照样看到了吗?最多比你落后一次迭代的时间,真的会造成非常大的差别?可是实验结果就是表明,NAG收敛的速度比Momentum要快。
对NAG原来的更新公式进行变换,得到的等效形式如下:

注:上述公式对应的原公式为:

这个NAG的等效形式与Momentum的区别在于,本次更新方向多加了一个![]() ,它的直观含义就很明显了:如果这次的梯度比上次的梯度变大了,那么有理由相信它会继续变大下去,那我就把预计要增大的部分提前加进来;如果相比上次变小了,也是类似的情况。这样的解释听起来好像和原本的解释一样玄,但是读者可能已经发现了,这个多加上去的项不就是在近似目标函数的二阶导嘛!所以NAG本质上是多考虑了目标函数的二阶导信息,怪不得可以加速收敛了!其实所谓“往前看”的说法,在牛顿法这样的二阶方法中也是经常提到的,比喻起来是说“往前看”,数学本质上则是利用了目标函数的二阶导信息。
,它的直观含义就很明显了:如果这次的梯度比上次的梯度变大了,那么有理由相信它会继续变大下去,那我就把预计要增大的部分提前加进来;如果相比上次变小了,也是类似的情况。这样的解释听起来好像和原本的解释一样玄,但是读者可能已经发现了,这个多加上去的项不就是在近似目标函数的二阶导嘛!所以NAG本质上是多考虑了目标函数的二阶导信息,怪不得可以加速收敛了!其实所谓“往前看”的说法,在牛顿法这样的二阶方法中也是经常提到的,比喻起来是说“往前看”,数学本质上则是利用了目标函数的二阶导信息。
既然我们能够使得我们的更新适应误差函数的斜率以相应地加速SGD,我们同样也想要使得我们的更新能够适应每一个单独参数,以根据每个参数的重要性决定大的或者小的更新。
4.3 Adagrad
Adagrad是这样一种基于梯度的优化算法:它让学习率适应参数,对于出现次数较少的特征,我们对其采用更大的学习率,对于出现次数较多的特征,我们对其采用较小的学习率。因此,Adagrad非常适合处理稀疏数据。
AdaGrad算法就是将每一个参数的每一次迭代的梯度取平方累加后在开方,用全局学习率除以这个数,作为学习率的动态更新。
具体的计算方法如下:
1)计算梯度

2)累计平方梯度

3)计算更新

注:上述计算方法为:逐元素地应用除法和求平方根
4)应用更新

其中,G为梯度累积变量(是一个d*d的对角矩阵,矩阵中第(i,i)的元素为第i个参数的平方和),ε是一个小的常数,避免分母为0。
简版迭代公式如下:

经验上已经发现,对于训练深度神经网络模型而言,从训练开始时积累梯度平方会导致有效学习率过早和过量的减小。Adagrad在某些深度学习模型上效果不错,但不是全部。
Adagrad的其中一个优点就是不需要手动的调整学习率,一般默认使用0.01作为初始学习率。
Adagrad的一个主要缺点是它在分母中累加梯度的平方:由于没增加一个正项,在整个训练过程中,累加的和会持续增长。这会导致学习率变小以至于最终变得无限小,在学习率无限小时,Adagrad算法将无法取得额外的信息。接下来的算法旨在解决这个不足。
4.4 Adadelta
Adadelta是Adagrad的一种扩展算法,以处理Adagrad学习速率单调递减的问题。不是计算所有的梯度平方,Adadelta将计算计算历史梯度的窗口大小限制为一个固定值。
在Adadelta中,无需存储先前的w个平方梯度,而是将梯度的平方递归地表示成所有历史梯度平方的均值。在t时刻的均值只取决于先前的均值和当前的梯度(分量类似于动量项):

一般γ取0.9。
我们将adagrad中的G替换为![]()
![]() ,则有
,则有
 ,则有
,则有
上述分母相当于梯度的均方根(root mean aquared, RMS),因此可以用RMS简写

作者指出上述更新公式中的每个部分(与SGD,动量法或者Adagrad)并不一致,即更新规则中必须与参数具有相同的假设单位。为了实现这个要求,作者首次定义了另一个指数衰减均值,这次不是梯度平方,而是参数的平方的更新:

因此,参数更新的均方根误差为:

由于![]()
![]() 是未知的,我们利用参数的均方根误差来近似更新。利用替换先前的更新规则中的学习率,最终得到Adadelta的更新规则:
是未知的,我们利用参数的均方根误差来近似更新。利用替换先前的更新规则中的学习率,最终得到Adadelta的更新规则:
 是未知的,我们利用参数的均方根误差来近似更新。利用替换先前的更新规则中的学习率,最终得到Adadelta的更新规则:
是未知的,我们利用参数的均方根误差来近似更新。利用替换先前的更新规则中的学习率,最终得到Adadelta的更新规则:
算法最终实现如下:
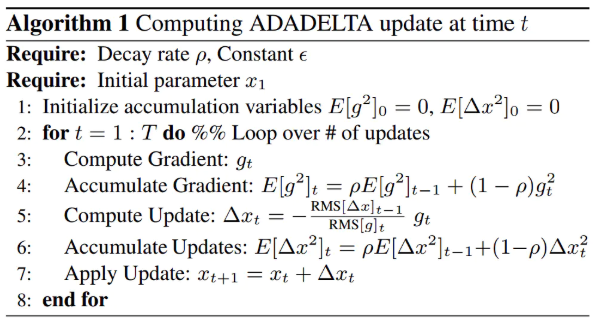
使用Adadelta算法,我们甚至都无需设置默认的学习率,因为更新规则中已经移除了学习率。
4.5 RMSprop
RMSprop是一个未被发表的自适应学习率的算法,该算法由Geoff Hinton在其Coursera课堂的课程6e中提出。
RMSprop和Adadelta在相同的时间里被独立的提出,都起源于对Adagrad的极速递减的学习率问题的求解。实际上,RMSprop是先前我们得到的Adadelta的第一个更新向量的特例:
同样,RMSprop将学习率分解成一个平方梯度的指数衰减的平均。Hinton建议将γ设置为0.9,对于学习率,一个好的固定值为0.001。
4.6 Adam
自适应矩估计(Adaptive Moment Estimation,Adam)[9]是另一种自适应学习率的算法,Adam对每一个参数都计算自适应的学习率。除了像Adadelta和RMSprop一样存储一个指数衰减的历史平方梯度的平均,Adam同时还保存一个历史梯度的指数衰减均值,类似于动量:

 和
和 分别是对梯度的一阶矩(均值)和二阶矩(非确定的方差)的估计,正如该算法的名称。当和初始化为0向量时,Adam的作者发现它们都偏向于0,尤其是在初始化的步骤和当衰减率很小的时候(例如β1和β2趋向于1)。
分别是对梯度的一阶矩(均值)和二阶矩(非确定的方差)的估计,正如该算法的名称。当和初始化为0向量时,Adam的作者发现它们都偏向于0,尤其是在初始化的步骤和当衰减率很小的时候(例如β1和β2趋向于1)。通过计算偏差校正的一阶矩和二阶矩估计来抵消偏差

正如我们在Adadelta和RMSprop中看到的那样,他们利用上述的公式更新参数,由此生成了Adam的更新规则:

作者建议β1取默认值为0.9,β2为0.999,ε为1e-8。他们从经验上表明Adam在实际中表现很好,同时,与其他的自适应学习算法相比,其更有优势。
4.7 AdaMax
见原文
4.8 Nadam
见原文
4.9 Visualization of algorithms
下面两张图给出了上述优化算法的优化行为的直观理解。(还可以看看这里关于Karpathy对相同的图片的描述以及另一个简明关于算法讨论的概述)。
在图4a中,我们看到不同算法在损失曲面的等高线上走的不同路线。所有的算法都是从同一个点出发并选择不同路径到达最优点。注意:Adagrad,Adadelta和RMSprop能够立即转移到正确的移动方向上并以类似的速度收敛,而动量法和NAG会导致偏离,想像一下球从山上滚下的画面。然而,NAG能够在偏离之后快速修正其路线,因为NAG通过对最优点的预见增强其响应能力。
图4b中展示了不同算法在鞍点出的行为,鞍点即为一个点在一个维度上的斜率为正,而在其他维度上的斜率为负,正如我们前面提及的,鞍点对SGD的训练造成很大困难。这里注意,SGD,动量法和NAG在鞍点处很难打破对称性,尽管后面两个算法最终设法逃离了鞍点。而Adagrad,RMSprop和Adadelta能够快速想着梯度为负的方向移动,其中Adadelta走在最前面。

正如我们所看到的,自适应学习速率的方法,即 Adagrad、 Adadelta、 RMSprop 和Adam,最适合这些场景下最合适,并在这些场景下得到最好的收敛性。
4.10 Which optimizer to use?
那么,我们应该选择使用哪种优化算法呢?如果输入数据是稀疏的,选择任一自适应学习率算法可能会得到最好的结果。选用这类算法的另一个好处是无需调整学习率,选用默认值就可能达到最好的结果。
总的来说,RMSprop是Adagrad的扩展形式,用于处理在Adagrad中急速递减的学习率。RMSprop与Adadelta相同,所不同的是Adadelta在更新规则中使用参数的均方根进行更新。最后,Adam是将偏差校正和动量加入到RMSprop中。在这样的情况下,RMSprop、Adadelta和Adam是很相似的算法并且在相似的环境中性能都不错。Kingma等人[9]指出在优化后期由于梯度变得越来越稀疏,偏差校正能够帮助Adam微弱地胜过RMSprop。综合看来,Adam可能是最佳的选择。
有趣的是,最近许多论文中采用不带动量的SGD和一种简单的学习率的退火策略。已表明,通常SGD能够找到最小值点,但是比其他优化的SGD花费更多的时间,与其他算法相比,SGD更加依赖鲁棒的初始化和退火策略,同时,SGD可能会陷入鞍点,而不是局部极小值点。因此,如果你关心的是快速收敛和训练一个深层的或者复杂的神经网络,你应该选择一个自适应学习率的方法。
参考:
An overview of gradient descent optimization algorithms
Nesterov accelerated gradient 深入理解:https://zhuanlan.zhihu.com/p/22810533/
深度学习优化方法-AdaGrad https://blog.csdn.net/program_developer/article/details/80756008

 浙公网安备 33010602011771号
浙公网安备 33010602011771号