


linux内核分析第二四学习报告
- 学生 黎静
- 课程内容
计算机三大法宝
• 存储程序计算机工作模型,计算机系统最最基础性的逻辑结构;
• 函数调用堆栈,高级语言得以运行的基础,只有机器语言和汇编语言的时候堆栈机制对于计算机来说并不那么重要,但有了高级语言及函数,堆栈成为了计算机的基础功能;
• 中断,多道程序操作系统的基点,没有中断机制程序只能从头一直运行结束才有可能开始运行其他程序。
一、函数调用堆栈
1.堆栈
堆栈式C语言程序运行时必须的一个记录调用路径和参数的空间。包括:
函数调用框架
传递参数
保存返回地址(如eax)
提供局部变量空间2.堆栈寄存器
(1)esp 堆栈指针
(2)ebp 基址指针(在C语言中表示当前函数调用基址)
3.堆栈操作
(1)push栈顶指针减少4个字节(32位)
(2)pop 栈顶指针增加4个字节
4.其他关键寄存器:
cs:eipcall
ret
5.参数传递与局部变量
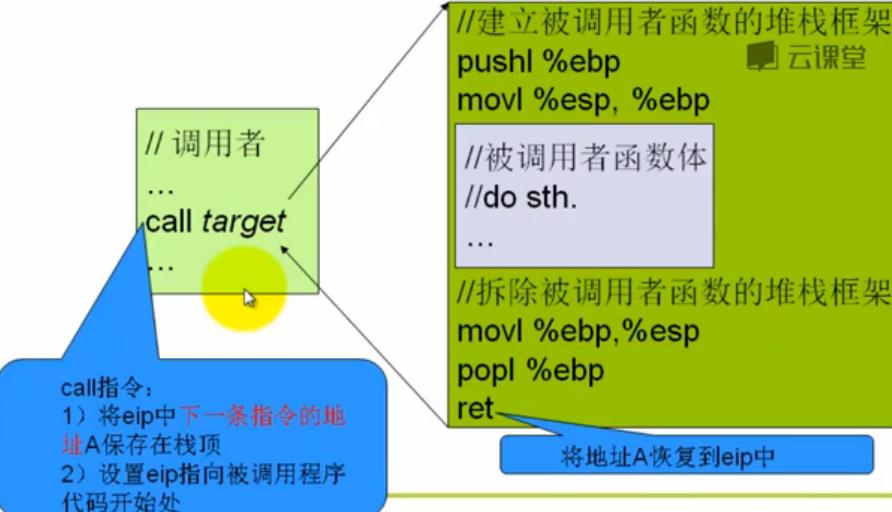
(1)建立框架(相当于 call 指令)
push %ebp
movl %esp,%ebp(2)拆除框架(相当于 ret 指令)
movl %ebp,%esp
pop %ebp函数返回时一定会拆除框架,建立和拆除是一一对应的。
(3)传递参数
在建立子函数的框架之前,局部变量的值保存在调用者堆栈框架中,所以在子函数框架建立之前可以采用变址寻址的方式将变量值入栈。
!函数的返回值通过eax寄存器传递
6.深入理解函数调用对战的工作机制
7.举例分析函数调用时堆栈的变化
二、实验
mypcb.h
头文件,在其他的.c文件中引用
/*
* linux/mykernel/mypcb.h
*
* Kernel internal PCB types
*
* Copyright (C) 2013 Mengning
*
*/
#define MAX_TASK_NUM 4
#define KERNEL_STACK_SIZE 1024*8
/* CPU-specific state of this task */
struct Thread {
unsigned long ip; //保存eip
unsigned long sp; //保存esp
};
typedef struct PCB{
int pid;
volatile long state; /* 记录进程状态,-1 未运行, 0 运行中, >0 阻塞停止 */
char stack[KERNEL_STACK_SIZE]; /* 定义堆栈结构*/
struct Thread thread;
unsigned long task_entry; /* 定义程序入口,通常是main函数*/
struct PCB *next;
}tPCB;
void my_schedule(void);//调度器函数mymain.c:
内核初始化和0号进程启动
/*
* linux/mykernel/mymain.c
*
* Kernel internal my_start_kernel
*
* Copyright (C) 2013 Mengning
*
*/
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
tPCB task[MAX_TASK_NUM]; //声明task数组,tPCB结构体类型在mypcb.h中有定义
tPCB * my_current_task = NULL; //声明当前task指针
volatile int my_need_sched = 0; //定义是否需要调度的标志
void my_process(void);
void __init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/ // 0号进程数据结构的初始化
task[pid].pid = pid;
task[pid].state = 0; /* -1 unrunnable, 0 runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; //定义进程0的入口为my_process,见第58行开始的my_process函数
task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; // 定义堆栈的栈顶
task[pid].next = &task[pid]; //因为一开始系统里只有进程0没有其他进程,所以pid的next还是指向自己
/*fork more process */
//创建更多其他的进程,在初始化这些进程的时候可以直接拷贝0号进程的代码
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
/* 从0号进程开始启动 */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl %1,%%esp\n\t" /* 设置 esp 的值*/
"pushl %1\n\t" /* 将 ebp 压栈(此时esp=ebp),%1相当于task[pid].thread.sp*/
"pushl %0\n\t" /* 将 eip 压栈,%0相当于task[pid].thread.ip*/
"ret\n\t" /* 相当于 eip 出栈 */
"popl %%ebp\n\t" /* 0号进程正是启动 */
:
: "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
void my_process(void) //所有的进程都以这个作为起点
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this is process %d -\n",my_current_task->pid);
if(my_need_sched == 1) //执行10 000 000次才判断一次是否需要调度
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE "this is process %d +\n",my_current_task->pid);
}
}
}myinterrupt.c:
/*
* linux/mykernel/myinterrupt.c
*
* Kernel internal my_timer_handler
*
* Copyright (C) 2013 Mengning
*
*/
#include <linux/types.h>
#include <linux/string.h>
#include <linux/ctype.h>
#include <linux/tty.h>
#include <linux/vmalloc.h>
#include "mypcb.h"
extern tPCB task[MAX_TASK_NUM];
extern tPCB * my_current_task;
extern volatile int my_need_sched;
volatile int time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current running process,
* so it use kernel stack of current running process
*/
void my_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 && my_need_sched != 1) //用于设置时间片的大小,时间片用完时设置调度标志。满足时钟中断发生1000次,并且my_need_sched!=1时,把my_need_sched赋为1。当进程发现my_need_sched=1时,就会执行my_schedule,进行进程调度。
{
printk(KERN_NOTICE ">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
void my_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL //发生错误时返回
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE ">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next; //把当前进程的下一个进程赋给next
prev = my_current_task; //prev当前进程
if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */
{
/* 进程切换跳转到下一进程 */
asm volatile(
"pushl %%ebp\n\t" /* 保存当前ebp */
"movl %%esp,%0\n\t" /* 保存当前esp */
"movl %2,%%esp\n\t" /* 重新记录要跳转进程的 esp,%2为 next->thread.sp*/
"movl $1f,%1\n\t" /* 保存当前 eip ,%1为prev->thread.ip*/
"pushl %3\n\t"
"ret\n\t" /* 记录要跳转进程的 eip,%3为 next->thread.ip*/
"1:\t" /* 下一个进程开始执行 */
"popl %%ebp\n\t"
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
}
else //进程是新的进程
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE ">>>switch %d to %d<<<\n",prev->pid,next->pid);
/* switch to new process */
asm volatile(
"pushl %%ebp\n\t" /* 保存当前 ebp */
"movl %%esp,%0\n\t" /* 保存当前 esp */
"movl %2,%%esp\n\t" /* 重新记录要跳转进程的 esp ,%2为 next->thread.sp*/
"movl %2,%%ebp\n\t" /* 重新记录要跳转进程的 ebp,%2为 next->thread.sp */
"movl $1f,%1\n\t" /* 保存当前 eip ,%1为prev->thread.ip,%1f就是指标号1:的代码在内存中存储的地址*/
"pushl %3\n\t"
"ret\n\t" /* 重新记录要跳转进程的 eip,%3为 next->thread.ip */
: "=m" (prev->thread.sp),"=m" (prev->thread.ip)
: "m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
四、学习总结理解
课程中提到了计算机工作的三大法宝:存储程序计算机工作模型、堆栈、中断。
-
存储程序计算机工作模型,简单的说就是CPU解释并执行计算机指令,Memory用来存储数据和程序。
-
堆栈机制(函数调用堆栈),在机器语言和汇编语言的时候并不那么重要,后来有了高级语言,尤其是函数调用使得堆栈成为计算机工作的重要基础;
-
中断,引入中断机制使内核可以处理硬件外设I/O。中断来源有I/O请求、时钟以及系统调用。中断可以使计算机同时处理多个程序,提高了计算机效率。
