
图论一(图的存储、遍历、生成树、最短路)
图论基础
- 图的存储
- 图的遍历
- 最小生成树
- kruskal 算法
- prim算法
- 最短路
- Dijkstra 算法
- Bellman-Ford 算法
- SPFA算法
- Floyd-Warshall 算法
边集数组
采用结构体存储边,包括边的起点、终点、权值等信息,这个结构体数组称为边集数组。
#define MAXN 100005 int tot; struct edge{ int u, v, w; }es[MAXM]; void adde(int u, int v, int w){ es[++tot].u = u, e[tot].v = v, e[tot].w = w; }
邻接矩阵
矩阵A可以看做一个二维数组。如果一个有向图中,点\(u\)到\(v\)有边相连,权值为\(w\), 则\(A[u][v] = w\).
如果是无向图,点\(u\)与\(v\)的边权为\(w\), 则\(A[u][v] = A[v][u] = w\)
int arr[MAXN][MAXN]; void adde(int u, int v, int w){ //无向图存储 arr[u][v] = w; arr[v][u] = w; }
邻接表
将点\(u\)的所有邻接点插入到以\(u\)为头的链表中,链表中的元素可以做成结构体,保存边上的信息。每个点都有一个链表。这种存储方式称为邻接表。
下面是使用\(STL\)中的\(list\)的示例。
#define MAXN 100005 struct Edge{ int v, w; Edge(int a = 0, int b = 0){ v = a, w = b; } }; list<Edge> mylist[MAXN]; void adde(int u, int v, int w){ //无向图存储 mylist[u].push_back(Edge(v, w)); mylist[v].push_back(Edge(u, w)); }
邻接表
也可以使用\(vector\)存储。
#define MAXN 100005 struct Edge{ int v, w; Edge(int a = 0, int b = 0){ v = a, w = b; } }; vector<Edge> myvec[MAXN]; void adde(int u, int v, int w){ //无向图存储 myvec[u].push_back(Edge(v, w)); myvec[v].push_back(Edge(u, w)); }
邻接表
使用\(STL\)虽然方便,但是运行速度较慢,如果数据较大,可能超时。较好的方法是使用数组模拟邻接表,它有一个很学术的名字:"链式前向星"。
int head[MAXN]; int tot; struct Edge{ int v, w, nxt; }es[MAXM]; void adde(int u, int v, int w){ es[++tot].v = v, es[tot].w = w, es[tot].nxt = head[u], head[u] = tot; es[++tot].v = u, es[tot].w = w, es[tot].nxt = head[v], head[v] = tot; }
图的遍历
图的遍历有两种顺序,一种是深度优先搜索, 一种是广度优先搜索。
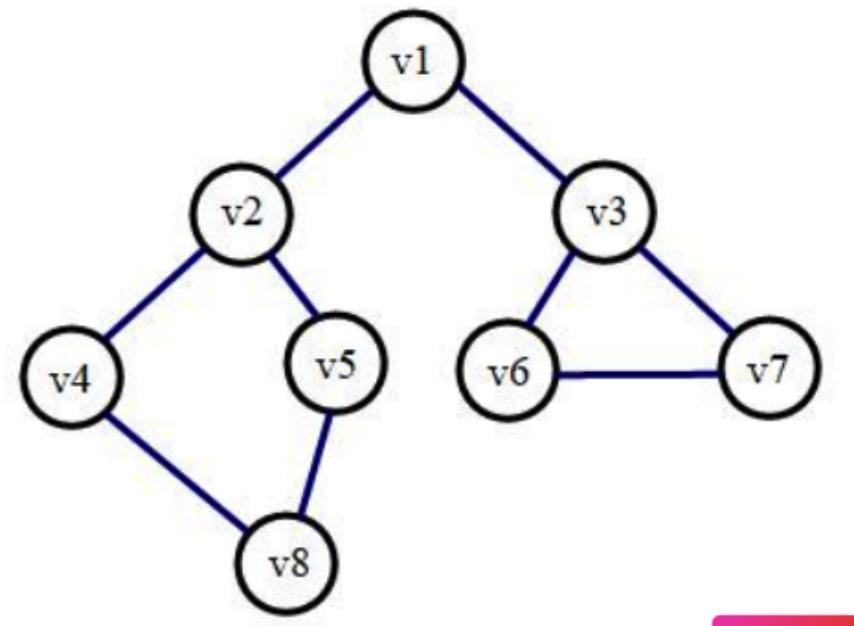
深度优先搜索,就是往优先纵深的方向向搜索,直到无路可走了,则回溯一步,找一条还没有走过的路径,又优先往纵深方向搜索。
如右图, 遍历的顺序是:\(v1 \to v2 \to v4 \to v8 \to v5 \to v3 \to v6 \to v7\)。
深度优先遍历
深度优先搜索一般采用递归实现。
//图采用邻接矩阵存储。 int arr[MAXN][MAXN]; void dfs(int r){ vis[r] = 1; cout << r << endl; for(int i = 1; i <= n; i++){ if(arr[r][i] > 0 && !vis[i]){ vis[i] = 1; dfs(i); } } }
深度优先遍历
//图采用邻接表存储。 int head[MAXN]; struct Edge{ int v, w, nxt; }es[MAXM]; void dfs(int r){ vis[r] = 1; cout << r << endl; for(int i = head[r]; i; i = es[i].nxt){ int v = es[i].v; if(!vis[v]){ vis[v] = 1; dfs(v); } } }
广度优先遍历
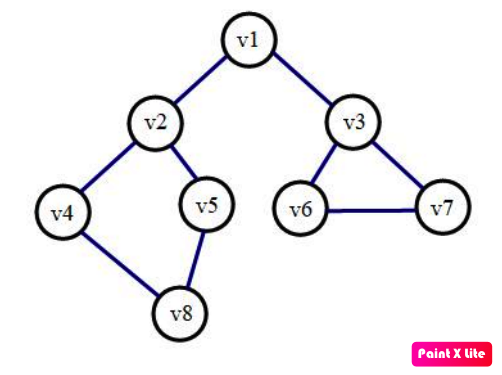
另一种顺序是广度优先搜索,是优先从周围出发,由近及远,一层层的遍历。
如右图, 遍历的顺序是:\(v1 \to v2 \to v3 \to v4 \to v5 \to v6 \to v7 \to v8\)
.
广度优先搜索一般采用队列实现。
//图用邻接表存储 int head, tail, que[MAXN]; int fir[MAXN]; struct Edge{ int v, w, nxt; }es[MAXM]; void bfs(int r){ que[tail++] = r; vis[r] = 1; while(head < tail){ r = que[head++]; cout << r; for(int i = fir[r]; i; i = es[i].nxt){ if(!vis[es[i].v]){ que[tail++] = es[i].v; vis[es[i].v] = 1; } } } }
最小生成树
生成树
一个无向图,如果删除一些边,但保留所有的点,最后图变成一棵树,则这棵树称为该图的生成树。
图的生成树不是唯一的。
一个带权的无向图,它的所有生成树中,边权和最小的生成树,称为最小生成树。
最小生成树也不一定是唯一的,但他们的权值和都是最小的。
kruskal算法
这是一个求最小生成树的算法。
假设图中顶点为\(n\), 边数为\(m\)。
我们将所有的边用边集数组存储,并按边权由小到大排序。
一开始,假设每个顶点都是独立的,即图中没有边,现在我们要选择\(n-1\)条边加上去,将所有的点连通。
我们可以在边集数组中,依次选边,如果当前选的边为\((u,v,w)\), 检查点\(u\)和\(v\)之前是否连通,如之前已经连通,则该边不选,继续枚举下一条边;否则,选择该边。
当选择了\(n-1\)条边后,结束算法,此时即找到了最小生成树。
struct edge{ int u, v, w; bool operator < (const edge &t)const{ return w < t.w; //按边权由小到大排序 } }es[MAXM]; void adde(int u, int v, int w){ es[++ecnt].u = u, es[ecnt].v = v, es[ecnt].w = w; }; for(int i = 1; i <= m; i++){ if(es[i].u and es[i].v have not connected){ //伪代码: 判断两点是否连通 select i; //伪代码,选边 connect(es[i].u, es[i].v); // 伪代码: 将两个点连通 sum += es[i].w; cnt++; } if(cnt == n - 1) break; } cout << sum << endl;
并查集
如何快速的判断点\(u\)和\(v\)是否连通呢?可以使用并查集。
并查集是一种简单但巧妙的数据结构,它可以快速的进行集合的合并、查找等操作。
而完成这一切,只需要一个数组即可。
对一个集合,我们可以任选该集合中的某个元素作为代表。集合可以用一棵树来表示,树根表示该集合的代表。
而这棵树,我们只需要用一个\(fa\)数组,\(fa[i]\)表示点\(i\)的父亲。
一开始,每个节点都各自作为一个集合,每个点都是根节点,此时,对每个点\(i\), 都有\(fa[i] = 0\).
并查集
查询操作
如果我们想知道某个元素所属的集合,我们只需要找到它所在树的根即可。我们可以沿着父亲一直往上走,直到某个点的父亲为\(0\), 则表示到了根节点了。
int getroot(int r){ while(fa[r]) r = fa[r]; return r; }
并查集
合并两个元素所属的集合
对两个元素,先找到各自的根节点,判断根节点是否为同一个,如果是,则不需要合并;否则,将其中一个根节点的\(fa\)设成另一个根节点即可。
void my_union(int a, int b){ int ra = getroot(a); int rb = getroot(b); if(ra != rb){ fa[ra] = rb; } }
优化
没有优化的情况下,表示一个集合的树有可能退化成一条链,此时查询操作就变得很慢了。我们需要优化。
- 第一种优化: 按秩合并
即两棵树合并的时候,将深度小的树的根作儿子,深度大的树的根作父亲。这样,合并过后的树,深度增长得较慢。可以证明,它的深度不会超过\(logN\).
因为每次合并,只有深度相等的两棵树,其合并过后深度才增加1.可以认为,体量翻一番一倍,深度加1. 那么最终的深度显然不会超过\(logN\),因为经过\(logN\)次后,体量就会达到\(n\).
实现时,再多用一个数组\(h\),令\(h[i]\)表示点\(i\)所在树的深度,合并时判断根节点的\(h\)值,将深度小的树的根作儿子,深度大的树的根作父亲。如果两棵树的深度相等,合并后,新树的根的\(h\)值加1;否则,树的深度不变。
并查集
-
第二种优化:路径压缩
在查询节点\(u\)所在树的根时,我们需要沿着\(u\)到根的路径遍历一次。如果路径很长,则遍历耗时较大。那为何不能将这条路径压缩呢?我们可以把这条路径上的点(除根节点之外)都取下来,接在根的下方,作为根的儿子。 反正这棵树,只是表示一个集合而已。树的形态不管怎么样,都能表示集合。扁平化的树明显能更快地找到根节点。
int getroot(int r){ if(fa[r] == 0) return r; return fa[r] = getroot(fa[r]); }
并查集
上面的代码看起来很简单,但因为用了递归,当路径很长时,可能导致爆栈,发生运行时错误。
可以将之修改为非递归代码:
int stk[MAXN], top; int getroot(int r){ while(fa[r]) stk[top++] = r, r = fa[r]; while(top--){ fa[stk[top]] = r; } return r; }
使用路径压缩的并查集, 时间复杂度接近\(N\alpha\), 其中\(\alpha\)可以近似的看做是一个常数。
回到kruskal算法
现在我们可以使用并查集来完善kruskal算法了。
int kruskal(){ for(int i = 1; i <= m; i++){ int ru = getroot(es[i].u), rv = getroot(es[i].v); //采用路径压缩 if(ru != rv){ ans += es[i].w; ru = fa[rv]; cnt++; } if(cnt == n - 1) return ans; } return -1; } int main(){ sort(es + 1, es + m + 1); //将边集数组按照边权排序 kruskal(); }
最小生成树
prim算法
算法描述:一个国王想要开辟疆土。有\(n\)个城堡,他现在在\(1\)号城堡,他想要去占领所有的城堡。由于他威望很高,实力很强,他所到之处,莫不臣服。他所付出的代价,只是他的国家到该城堡的距离。于是他每次都选一个离他国土最近的城堡,去征服它。等他征服所有的城堡以后,他所付出的代价,就是\(n\)个城堡的最小生成树。
最小生成树
prim算法
如何快速找到离国土最近的城堡呢?
如果每次都扫描所有的跨越国境的边,最多需要扫描\(m\)条,一共要做\(n\)次,时间复杂度为\(O(nm)\)。
我们可以对每个还未占领的城堡\(i\),记录它到国土内城堡的最小距离,设为\(dis[i]\)。占领了一个城堡后,设该城堡为\(j\),则\(dis[i]\)可能会变小,需要更新,\(dis[i] = min(dis[i], w(i,j))\)。
优化过后,时间复杂度为\(O(n^2)\).
prim算法
int prim(int r){ memset(dis, 0x3f, sizeof dis); dis[r] = 0, vis[r] = 1; for(int i = 1; i < n; i++){ for(int j = fir[r]; j; j = es[j].nxt){ int v = es[j].v; if(!vis[v]) dis[v] = min(dis[v], es[j].w); } res = 0x3f3f3f3f; for(int j = 1; j <= n; j++) if(vis[j] == 0 && dis[j] < res){ res = dis[j], r = j; } if(res == 0x3f3f3f3f) return -1; vis[r] = 1; ans += res; } return ans; }
最短路算法
在一个图中,从某点出发,求它到其他各顶点的最短路径。常见的最短路算法有Dijkstra算法, Bellman-ford算法,SPFA算法, Floyd-warshall算法等。
这些算法各有各的优点和用途。Dijkstra算法用于求单源点最短路,时间复杂度为\(O(n^2)\), 采用堆优化后,复杂度可以做到\(O(mlogn)\);Bellman-ford算法时间复杂度较高,达到\(O(mn)\), 但可以处理负权环; SPFA算法是对Bellman-ford算法的改良版本,速度快了很多,大多数时候能够达到\(O(m)\), 但最坏情况下,仍然达到了\(O(mn)\); Floyd-warshall算法能够求任意两点之间的最短距离,时间复杂度为\(O(n^3)\).
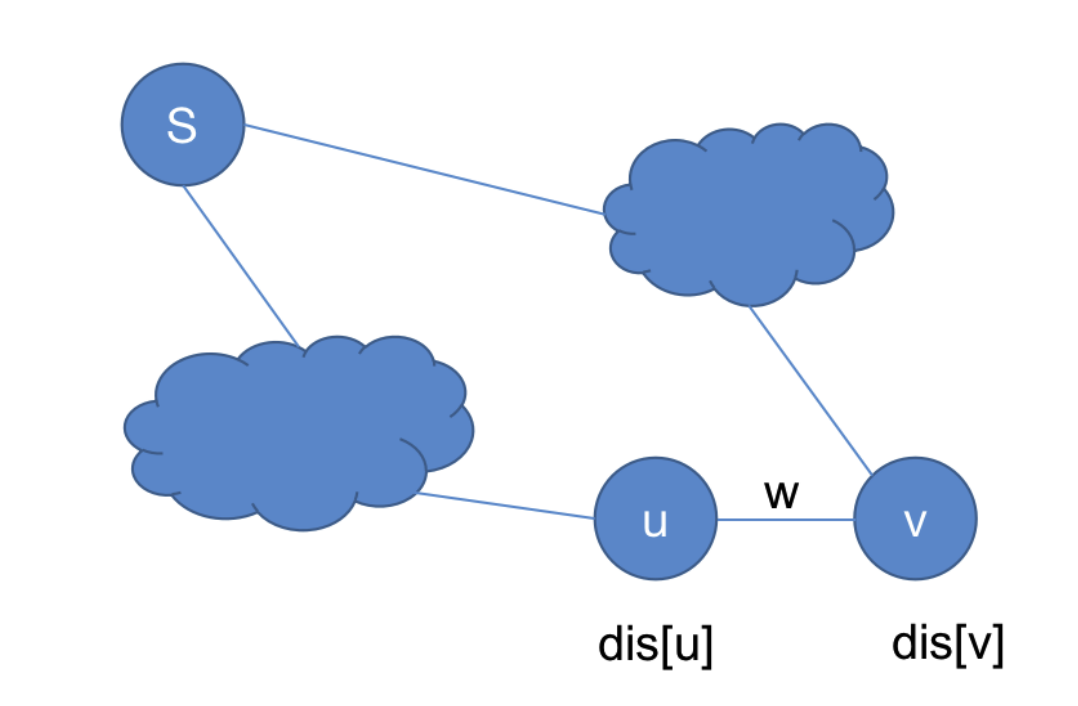
松弛
在很多关于图算法的书籍中,都可以看到松弛这个词。简单来讲,松弛就是更新某个顶点的\(dis\)。比如在求最短路中,设s为源点,u,v为任意两个顶点,u,v有边相连,边的权值为w。设dis[u]中保存了源点s到u的最短估计距离,dis[v]保存了s到v的距离最短估计距离。若现在dis[u]+w<dis[v],则意味着可以将dis[v]更新为dis[u]+w。
 ---
## Dijkstra 算法
算法描述如下:
设$dis[i]$表示从源点到点$i$的最短距离,初始时,源点的dis值为0, 其他点的dis值为无穷大。
将点集划分成两个集合,一个集合为$S$,表示已求出$dis$值的点集;另一个集合为$T$,表示还没有求出$dis$值的点集。
1. 一开始,所有点都在$T$中。
2. 在$T$中,找一个$dis$值最小的点,将它加入到$S$中。
3. 对每个新加入$S$中的点,设为$i$, 通过点$i$去更新它的邻接点的$dis$值。 比如说,它的一个邻接点为$j$,
则更新$dis[j] = min(dis[j], dis[i] + w(i,j))$.
4. 不断的重复2, 3, 直到所有的点都在$S$中,则结束算法。
---
## Dijkstra 算法
算法描述如下:
设$dis[i]$表示从源点到点$i$的最短距离,初始时,源点的dis值为0, 其他点的dis值为无穷大。
将点集划分成两个集合,一个集合为$S$,表示已求出$dis$值的点集;另一个集合为$T$,表示还没有求出$dis$值的点集。
1. 一开始,所有点都在$T$中。
2. 在$T$中,找一个$dis$值最小的点,将它加入到$S$中。
3. 对每个新加入$S$中的点,设为$i$, 通过点$i$去更新它的邻接点的$dis$值。 比如说,它的一个邻接点为$j$,
则更新$dis[j] = min(dis[j], dis[i] + w(i,j))$.
4. 不断的重复2, 3, 直到所有的点都在$S$中,则结束算法。
void dijkstra(int s){ memset(dis, 0x3f, sizeof dis); dis[s] = 0; int cnt = n; int res; while(--cnt){ for(int i = fir[s]; i; i = es[i].nxt){ int v = es[i].v; if(!vis[v] && dis[v] >= dis[s] + es[i].w){ dis[v] = dis[s] + ds[i].w; } } res = 0x3f3f3f3f; for(int i = 1; i <= n; i++){ if(vis[i] == 0 && dis[i] < res){ res = dis[i], s = i; } } if(res == 0x3f3f3f3f) break; } }
优先队列优化的Dijkstra
普通的Dijkstra算法的时间复杂度为\(O(n^2)\)。
堆优化的Dijkstra,时间复杂度为\(O(MlogN)\)。
在普通的Dijkstra中,每次找最小的\(dis\)都需要遍历一下所有的点。这里可以使用优先队列,优先队列中的元素为结构体,包括点的编号和dis值。每次用\(logN\)的时间,取出最小的\(dis\)的点,然后用这个最小的\(dis\)值,去更新它的邻接点。而更新过后的邻接点,再存入堆中。
这样一来,有的点经过多次更新,可能该点会有多个版本在堆中,取出时打一下标记。只要是取出过的点,再一次取到时,就直接扔了。
时间复杂度为\(O(MlogN)\).
memset(dis, 0x3f, sizeof dis); dis[st] = 0; myq.push(node(st, 0)); while(!myq.empty()){ node tmp = myq.top(); myq.pop(); int id = tmp.id, d = tmp.dis; if(vis[tmp.id] == 1) continue; vis[tmp.id] = 1; for(int i = fir[id]; i; i = es[i].nxt){ if(dis[es[i].v] > dis[id] + es[i].w){ dis[es[i].v] = dis[id] + es[i].w; last[es[i].v] = id; myq.push(node(es[i].v, dis[es[i].v])); } } }
SPFA算法
SPFA算法是由西南交通大学段丁凡1994提出的。它采用了队列和松弛技术。先将源点加入队列。然后从队列中取出一个点(此时该点为源点),对该点的邻接点进行松弛,如果该邻接点松弛成功且不在队列中,则把该点加入队列。如此循环往复,直到队列为空,则求出了最短路径。
判断有无负环:如果某个点进入队列的次数超过N次则存在负环 ( 存在负环则无最短路径,如果有负环则会无限松弛,而一个带n个点的图至多松弛n-1次)
SPFA算法
struct node{ int v, w, nxt; }es[MAXM]; bool spfa(int s){ int l = 1 ,r = 1, temp=0; dis[s] = 0; queue[r++] = s; inq[s] = 1; while(l < r){ temp = queue[l++]; inq[temp] = 0; for(int i = fir[temp]; i; i = es[i].nxt){ if(es[i].w + dis[temp] < dis[es[i].v]){ path[es[i].v] = temp; dis[es[i].v] = es[i].w + dis[temp]; if(inq[es[i].v] == 0){ queue[r++] = es[i].v; inq[es[i].v] = 1; if(r > 3 * V + 1)return 0; //一般情况下,节点平均进队3次以上,则可以退出了. } } } } return 1; }
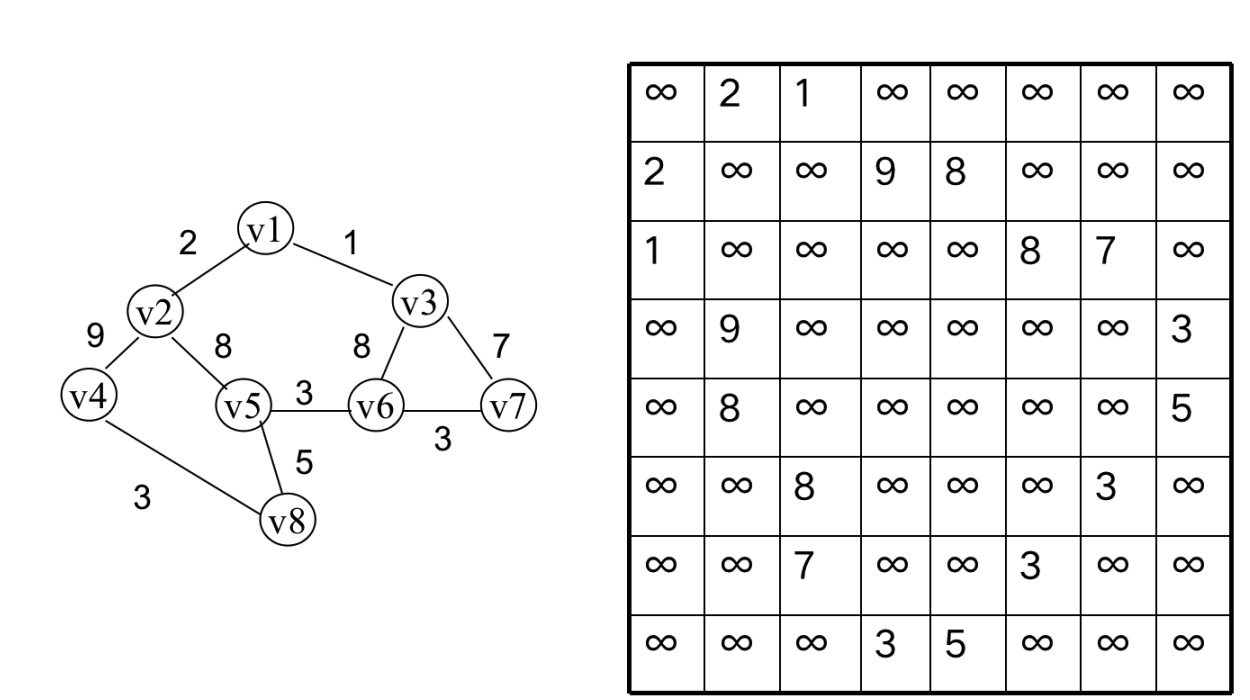
Floyd 算法
Floyd算法是求图中任意两点之间的最短距离。
使用三层循环,第一层循环枚举所有的中间点,第二层循环枚举起点,第三层枚举终点,将起点到终点的距离用经过中间点的路径去更新。
Floyd 算法
for(int k=0;k<n;k++){//k为中间节点 for(int i=0;i<n;i++){//i为起点 for(int j=0;j<n;j++){ //j为终点 if(i!=k&&i!=j&&k!=j) if(arr[i][k]+arr[k][j]<arr[i][j]) arr[i][j]=arr[i][k]+arr[k][j]; } } }
拓扑排序
如果将图中的边看做有意义的关系,比如先后关系,大小关系,生成关系,则可以按照这些关系将图中的顶点排序,形成一个线性序列。这种排序方法称为拓扑排序,形成的序列称为拓扑序列。
拓扑排序
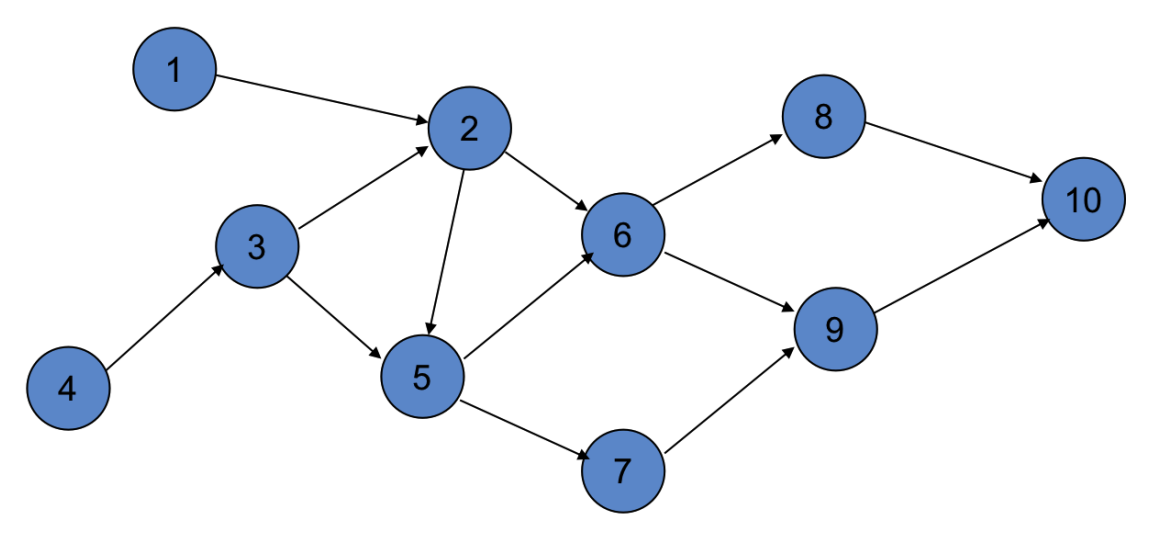
图中的节点代表大学某专业的十门专业课程,边代表它们的先后顺序。现在要在一学年中学完这十门课,请安排一个合理的顺序。可以看出:
\(1 \to 4 \to 3 \to 2 \to 5 \to 6 \to 7 \to 8 \to 9 \to 10\)是一个合理的顺序。
\(4 \to 3 \to 1 \to 2 \to 5 \to 6 \to 8 \to 7 \to 9 \to 10\) 是另一个合理的顺序。
这两个序列都是该图的拓扑序列。
拓扑排序
for(int i = 1; i <= n; i++){ if(deg[i] == 0) myq.push(i); } while(!myq.empty()){ int tmp = myq.top(); myq.pop(); ans[id++] = tmp; for(int i = fir[tmp]; i; i = es[i].nxt){ deg[es[i].v]--; if(deg[es[i].v] == 0)myq.push(es[i].v); } } if(id < n)printf("no solution\n"); else{ for(int i = 0; i < n; i++)printf("%d ", ans[i]); printf("\n"); }



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App
· 张高兴的大模型开发实战:(一)使用 Selenium 进行网页爬虫