
转自:https://blog.csdn.net/mabingyao/article/details/104768237
3. Apollo地图采集与生产
3.1业界高精地图产品
- 几个业界高精地图产品:
HERE HD Live Map
MobileEye
Google Waymo
TomTom
百度Apollo
3.2 Apollo地图采集
- Apollo地图采集硬件方案
![Apollo]()

| 基础传感器配置 | 用途 |
|---|---|
| 64线激光雷达 | 平装,采集道路路面 |
| 16线激光雷达 | 斜向上安装,检测高出红绿灯、标牌等信息 |
| GPS、IMU | 组合定位 |
| 长短焦相机 | 激光雷达与camera融合 |
-
基站搭建:RTK方案
![RTK方案]()
无遮挡情况下效果比较好,在高楼和林荫路的情境下效果不佳。 -
采集方案:
![Apollo数据采集]()


- 采集流程:检测传感器状态->开始采集(Apollo提供了一种一键采集的方法)
- 注意事项:双车道全覆盖3-5遍;车速60公里以下采集效果好;路口不需要特意停留
- 每分钟切分成一个Rosbag,一次采集结束后压缩打包,最终得到一个个包
- 地图数据平台服务
(1)数据管理体系
(2)制图任务创建
(3)制图进度跟踪
(4)制图结果下载
3.3 Apollo地图生产技术
-
地图制作——高精地图生产流程
![高精地图生产流程]()
(1) 数据采集:3.1
(2) 数据处理:
(a)点云为主:点云拼接,采集中信号不稳定,RTK在高楼、林荫路会有些困难。采用一些优化手段,将点云拼接起来到一张图中去
(b)图像:点云压成图像得到一个高精度的地图
(3) 元素识别:
(a)对点云反射图进行一些标注和分类
(b)通过深入学习对道路元素识别标识,整和到高精地图中去
(4) 人工验证
(a)没有车道线,需要人补充车道线
(b)逻辑信息,在路口应该看哪个指示灯 -
全自动数据融合加工效果图
![全自动数据融合]()
-
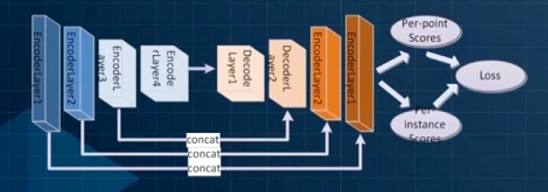
基于深度学习的地图要素识别
![深度学习,地图中要素识别]()
-
人工生产验证
![人工生产验证]()
-
地图成果:定位地图、高精地图、路线规划地图、仿真地图
![成果地图]()




3.4 Apollo高精地图
-
数据元素:
![数据元素]() (1)道路级别的可以识别到道路边界,lane级的可以识别到车道边界,注意区分
(1)道路级别的可以识别到道路边界,lane级的可以识别到车道边界,注意区分
(2)路口元素中,对一些复杂路口,没有车道线的,需要虚拟车道的补充
(3)逻辑关系元素,Apollo没有将逻辑赋予到具体元素,而是分出一个元素专门存放逻辑关系 -
车道模型:
![车道模型]()
Apollo根据一些原则,比如车道数目等,将车道分成几个Section -
Junction模型:路口表述
![路口模型]()
-
坐标系:
 (1)道路级别的可以识别到道路边界,lane级的可以识别到车道边界,注意区分
(1)道路级别的可以识别到道路边界,lane级的可以识别到车道边界,注意区分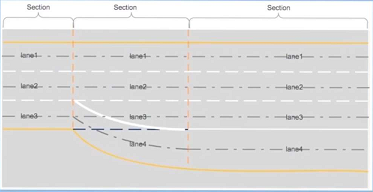

-
UTM,将全球分成60个zone
![UTM]()
-
WGS84:高度描述
![WGS84]()
得到了一个高度的描述,地图中标注的高度就是通过这个坐标系得到的 -
Track System
![TS]()
得到径向和横向的偏移量



-
Apollo OpenDrive规范
![Apollo OpenDrive]()
Apollo地图格式相对标准OpenDRIVE的改动:
(1)元素形状的表达方式:采用绝对坐标点序列描述边界形状,解决标准规范中可能出现倒刺的情况,更加平稳
(2)元素类型的扩展:新增了禁停区、人行横道、减速带等道路的描述
(3)扩展了对于元素之间相互关系的描述:比如新增了junction和junction内元素的关联关系
(4)其他:增加了车道中心线到真实物理道路边界的距离、停车线与红绿灯的关联关系 -
Overlap
![Overlap]()
overlap用以描述两个元素的空间关系,比如:空间重叠,不在lane上的停车位等 -
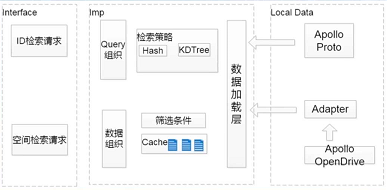
Apollo HDMap Engine
![Engine]()
用来从高精地图中提取相关元素


3.5 政府上的挑战:
- 国内地图的数据加偏。
据观察偏转插件对地图偏转的随机抖动幅度最大可达1.7米,如果定位定位依赖于绝对定位,就会导致定位结果跳变,严重影响无人驾驶汽车的安全性。 - 地图关注内容的变化
高程、曲率、坡度这些导航地图不关注的元素对于自动驾驶地图是非常需要的。 - 众包采集的问题
地图采集只能由拥有合法资质的地图采集公司,汽车、手机记录轨迹、采集图像的行为某种程度上都是测绘行为。
