
转自:https://blog.csdn.net/mabingyao/article/details/104821307
主讲人:万国伟 百度自动驾驶事业部研发工程师
百度的无人车定位技术
1. 配置多种传感器方案的自动驾驶汽车成果展示

“探路者”车型:宝马、北汽、奇瑞、MKZ——惯导和64线激光雷达,配置都比较高
无人驾驶微循环车“阿波龙”:百度×厦门金融——三个16线激光雷达,传感器配置大概10w左右
无人驾驶物流车“新石器”:百度×创业公司——一个激光雷达,传感器配置<5w
2. GNSS定位技术
- GNSS定位
- GPS(USA)、北斗(CHN)、GLONASS(RUS)、Galileo(EU)、QZSS(JPN)
- GPS技术:
(1)卫星星座(设计方案):24颗GPS卫星
(2)载波信号频率:L1、L2
(3)信号调制:载波信号上调制有测距码(L1–C/A码和P码;L2–P码)和导航电文
(4)系统基本功能:定位(P)、测速(V)、授时(T)
(5)测距:三颗卫星交会两点,舍弃外部空间点,就可以得到自己的测绘点,由于钟差,一般用四颗卫星,剔除误差
- 载波定位技术
- RTK:所有卫星把自己观测的数据给基站和接收机,基站根据多个卫星钟差计算出一个误差项,误差项传递给车端,车端利用误差项消除自己的观测误差,最后达到模糊度的固定。然后整周计算,最后得到精准的位置。
(1)基本原理:20km基线/22000km地卫距,视径重叠误差强相关
(2)优势:基本5秒内就可以提供cm级定位精度
(3)劣势:建基站、双向链路(4kpbs)
(4)发展趋势:终端低成本化、数据协议5G标准化 - PPP:基站将卫星发送的数据误差做分离处理,再传递给卫星,此时卫星已经剔除了误差,再对车端定位
(1)基本原理:各项误差被单独分离后终端矫正
(2)优势:全球均匀布站100+,单向广播
(3)当前劣势:建15+min的收敛时间;接收GEO广播需授权
(4)发展趋势:LEO-GNSS增强
- GNSS/GPS在无人车中的作用
- GPS授时:为无人车提供纳秒(ns)级的授时精度
- HD-MAP制图
- 在线定位
- 存在挑战
- 可靠性:不封闭,易受电磁干扰
- 可用性:城市峡谷和林荫路效果不好,很难达到cm级
3. 激光点云定位技术
- 百度激光点云定位算法框架
![百度激光点云定位算法框架]()

-
两个模块:图像对齐、SSD-HF。 图像对齐用于航向角(yaw)的优化,SSD-HF用于(x,y)的优化,z从点云地图中输出。
-
定位地图以数据形式存在
![定位地图]()
(1)定位地图每个格子的大小是128m×128m,每个各自拿出来得到反射值地图块和高度值地图块。
(2)反射值地图块:反射值可以理解为灰度值,图中有车道线等,再分成1024×1024,每个小格子的大小为12.5cm,存储了反射值、反射值方差。
(3)高度值地图块:存放高度z -
输入预测位姿+实时点云数据。输出用于进行进一步融合定位
-
定位
----- x,y方向的定位
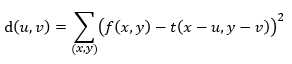
(1)SSD—Sum of Squared Difference(平方差总和)
每个激光点有对应的颜色值或高度值,地图上找一个对应点,二者相减,再求平方,再把所有点误差加起来。![SSD]()
(2)HF—直方图滤波器
在一个范围内每一个点都计算SSD值,最后把这个值转换成一个概率,得到一个分布图,红色表示响应度高,蓝色表示概率低,绿色是过渡。
----- 航向角优化——基于LK算法
(1)不做航向角优化直接匹配,会发现有比较大的x,y方向的偏差,这在无人车系统中造成的威胁是很大的。
(2)基于LK算法的框架,对颜色值和高度值进行优化,一般情况下误差很小,可以采用这个方法。若误差很大,这个方法不适用。
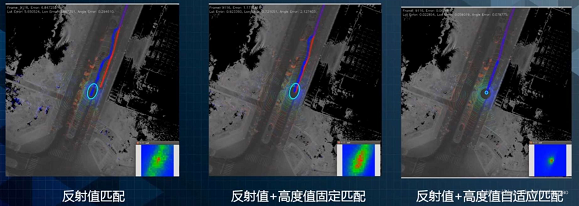
----- 反射值与高度值自适应融合
由于地面变化,在单一的反射值匹配和高度值匹配时可能不能得到很好的直方图,这时,通过自适应算法分别给反射值匹配和高度值匹配一个权重,最后融合到一个直方图中去。对比匹配结果如下图:![在这里插入图片描述]()

4. 视觉定位技术
- 视觉定位是通过识别图像中具有语义信息的稳定特征,并于地图匹配来获得车辆的位置和朝向。
- 特点:
(1)摄像头技术成熟,结构化地图尺寸小,有利于降低系统生产成本。
(2)车道线,路灯等道路元素稳定性高,不易变动,地图生命周期较长。
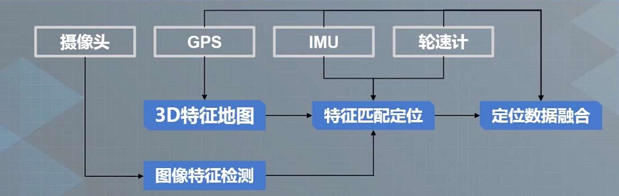
(3)配置灵活,根据识别算法性能,可以使用不同的特征组合,易于拓展。 - 算法流程:
![视觉定位算法流程]()
(1)3D特征地图离线生成,是基于视觉的全局定位算法基础。
(2)图像特征检测及匹配是定位算法的核心,IMU和轮速计信息在这个环节用于估计车辆运动。
(3)最后的数据融合可以将GPS、视觉定位和IMU数据整合,优化定位结果,并提供高频输出。
5. 捷联惯性导航技术
捷联惯性导航系统
- 概述
- 初始条件:已知的初始速度、位置、姿态
- 输入数据:惯性测量元件测量到的载体相对于惯性空间角运动和线运动参数。
- 解算方法:捷联惯性导航解算,IMU数据积分
- 输出结果:实时的载体速度、位置和姿态
- 优点:
(1)自主性、隐蔽性
(2)三维速度、位置和姿态
(3)输出频率高
(4)短时间精度高 - 缺点:误差随时间累积
- 惯性测量单元IMU
- 组成单元:陀螺仪、加速度计
- 输出元素
(1)加速度计能够测量出载体相对于惯性空间所受的力
(2)陀螺仪能够测量出载体沿陀螺仪轴向的旋转角速度或旋转增量 - 功能
IMU是惯性导航系统的基础,直接决定了惯性导航系统所能达到的精度。
- 捷联惯性导航系统——初始对准
- 把载体坐标系或者说IMU坐标系与世界坐标系(也可以叫导航坐标系)对应起来,要对准位置和姿态
- 对准方式不同:
高精度IMU:
(1)精度等级:陀螺仪零偏<1°/h,加速度计零偏<1mg
(2)特点:能够敏感到地球自转角速度(15°/h)
(3)原理:重力矢量与地球自转矢量不共线、Kalman滤波速度匹配精对准
(4)典型IMU:光纤和激光IMU
低等级IMU:
(1)精度等级:陀螺仪零偏>1°/h,加速度计零偏>1mg
(2)特点:无法敏感到地球自转角速度(15°/h)、测量噪声大、存在随机开机零偏等误差
(3)原理:加速度计水平对准、航向粗对准(外部辅助,磁强计,gps速度等)、Kalman滤波速度匹配精对准
(4)典型IMU:MEMS以及消费级IMU
(5)航向优化方式:双天线,或者得到车行驶起来的速度,或直接使用dps速度
- 捷联惯性导航系统——解算
捷联解算框图![捷联解算框图]()

6. 组合导航技术
组合导航系统
- 概述
- 系统组成:两种或两种以上非相似的导航系统(如GNSS、SINS等)
- 必要条件:可以对同一信息进行测量(如GNSS、SINS都可以计算出载体的位置速度信息)
- 融合方法:以SINS的误差方程作为Kalman滤波的状态方程,GNSS等其他系统与SINS的误差作为观测量进行SINS的误差估计,并对SINS进行矫正。
- 优点:
(1)协同:超越单一子系统的性能,弥补各个单一子系统的缺点
(2)优势互补:充分发挥各个子系统的优势
(3)余度:提高系统的稳定性
- 百度组合导航系统——系统框图
![组合导航系统系统框图]() 注意:从SINS模块输出的原因:高频输出
注意:从SINS模块输出的原因:高频输出
 注意:从SINS模块输出的原因:高频输出
注意:从SINS模块输出的原因:高频输出