图总结
图的知识点总结
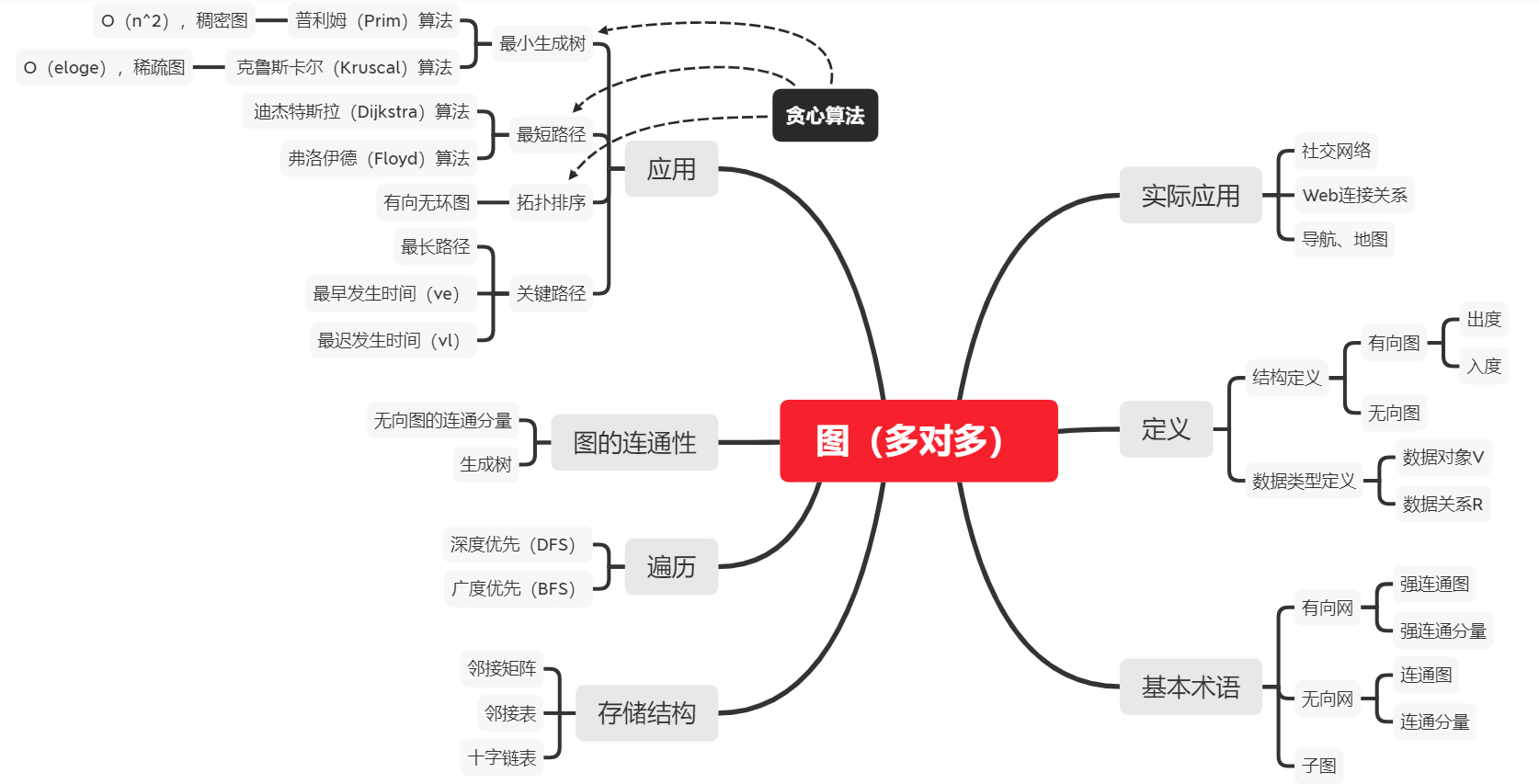
一、思维导图
二、重要概念笔记
-
图的定义和基本术语
-
定义
-
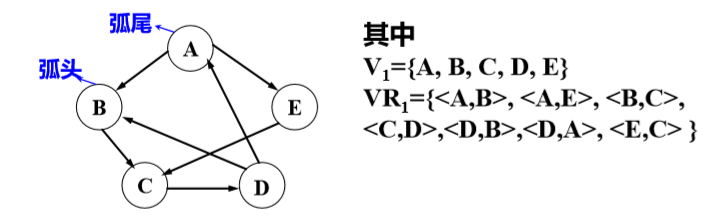
图:是由一个顶点集 V 和一个顶点间的关系集合 组成的数据结构。
-
“弧”是有方向的,因此称由顶点集和弧集构成的 图为有向图。
-
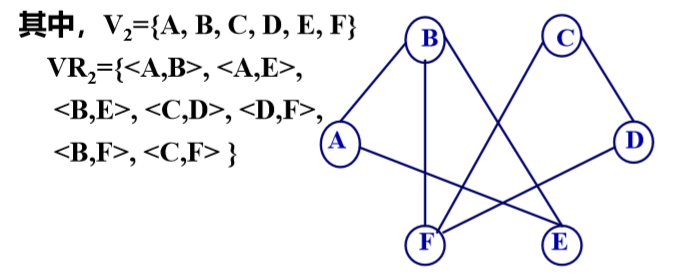
由顶点集和边集构成的图称作无向图。
-
-
基本术语
-
有(无)向网:弧或边带权的图
-
完全图:含有e=n(n-1)/2条边的无向图
-
有向完全图:含有e=n(n-1)条弧的有向图称作有向完全图
-
稀疏图:e<nlogn;稠密图:e>=nlogn
-
度=出度(以顶点v为弧尾的弧的数目)+入度(以顶点v为弧头的弧的数目)仅对有向图
-
路径长度:从顶点v到顶点w路径上边的数目;简单路径:序列中顶点不重复出现的路径;简单回路:序列中第一个顶点和最后 一个顶点相同的路径
-
对无向图:若图G中任意两个顶点之间都有路径相通,则称此图为连通图:若无向图为非连通图,则图中各个极大连通子图,称作此图的连通分量。对有向图:若任意两个顶点之间都存在一条有向路径,则称此 有向图为强连通图。否则,其各个强连通子图称作它的强连通分量。
-
-
-
图的存储结构
-
邻接矩阵: 无向图的邻接矩阵是对称的,有向图的邻接矩阵可能是不对称的。在有向图中:①出度:统计第i行1的个数②入度:统计第j列1的个数。
含有n个顶点和e条边的无向图的邻接矩阵中,零元素的个数为:n^2-2e
#define MaxInt 32767 //表示极大值 #define MVNum 100 //最大顶点数 typedef char VerTexType; //假设定点的数据类型为字符型 typedef int ArcType; //假设边的权值类型为整型 typedef struct { // 图的定义 VerTexType vexs[MVNum]; // 顶点表 ArcType arcs[MVNum][MVNum]; // 弧的信息(邻接矩阵) int vexnum, arcnum; // 图当前的顶点数和边数 } AMGraph; //邻接矩阵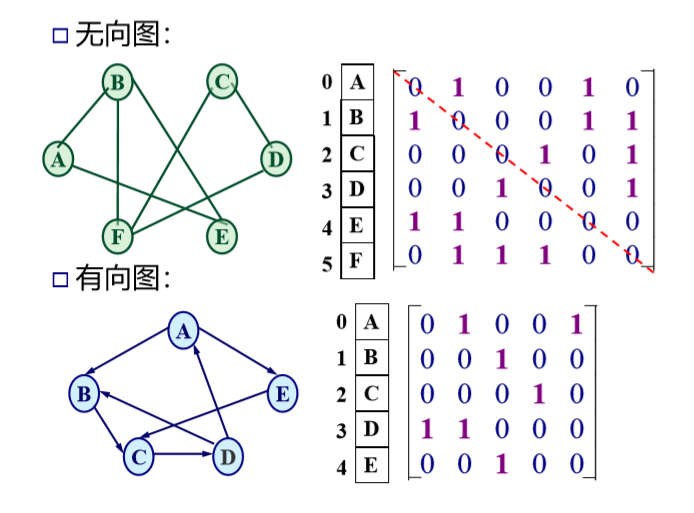
-
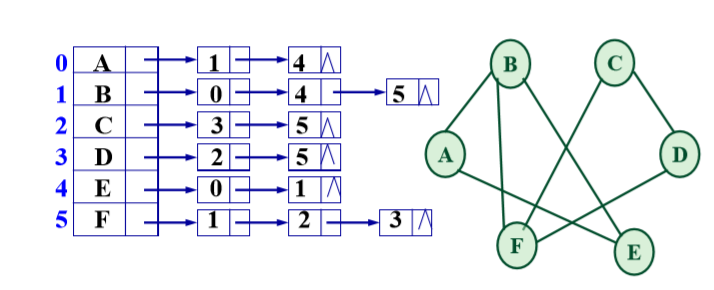
邻接表:邻接点域、链域、数据域。
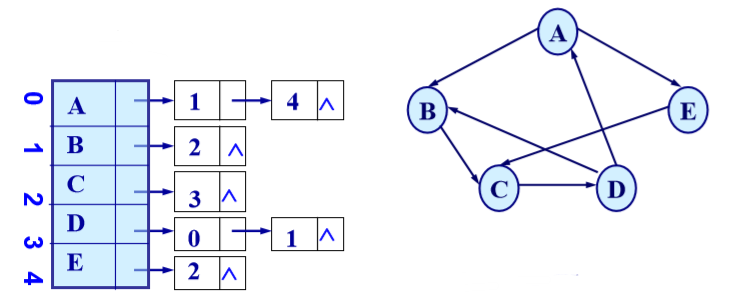
//表(弧/边)结点: typedef struct ArcNode { int adjvex; // 该弧所指向的顶点的位置 struct ArcNode *nextarc;//指向下一条弧的指针 InfoType *info; // 该弧相关信息的指针 } ArcNode; //头结点: typedef struct VNode { VerTexType data; // 顶点信息 ArcNode *firstarc; // 指向第一条依附该顶点的弧 } VNode, AdjList[MAX_VERTEX_NUM];无向图邻接表:
有向图邻接表:
-
十字链表:从横向上看是邻接表,从纵向看是逆邻接表
typedef struct ArcBox { // 弧的结构表示 int tailvex, headvex; InfoType *info; struct ArcBox *hlink, *tlink; } VexNode; typedef struct VexNode { // 顶点的结构表示 VertexType data; ArcBox *firstin, *firstout; } VexNode;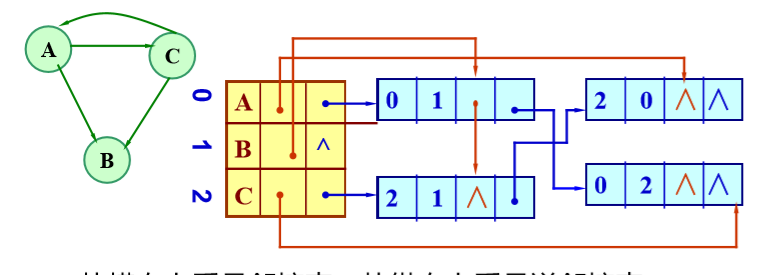
-
-
图的遍历
-
深度优先遍历(DFS)
int visit[2*MAX]; void dfs(Graph G,int s){ Arc* p = G.vex[s].firstArc; if(!visit[s]){ printf("%4s",G.vex[s].data); visit[s] = 1; } while(p != NULL){ if(!visit[p->adjvex]) dfs(G,p->adjvex); p = p->nextArc; } } -
广度优先算法(BFS)
int q[2*MAX],f=0,r=0; int visit_q[MAX]; void bfs(Graph G,int s){ if(!visit_q[s]){ printf("%4s",G.vex[s].data); visit_q[s] = 1; Arc* p = G.vex[s].firstArc; while(p != NULL){ if(!visit_q[p->adjvex]) q[r++] = p->adjvex; p = p->nextArc; } } while(f < r){ bfs(G,q[f++]); } }
-
-
最小生成树
构造的最小生成树并不一定唯一,但最小生成树的权值之和一定是相同的。
-
普利姆算法:
#define INF 32767 void Prim(MGraph g,int v){ int lowcost[MAXv]; int min; int closest[MAXV],i,j,k; for(i=0;i<g.n;i++){ lowcost[j]=g.edges[v][i]; closest[i]=v; } for(i=1;i<g.n;i++){ min=INF; for(j=0;j<g.n;j++){ if(lowcost[j]!=0&&lowcost[j]<min){ min=lowcost[j]; k=j; } printf("边(%d,%d)权为:%d\n",closest[k],k,min); lowcost[k]=0; } for(j=0;j<g.n;j++){ if(g.edges[k][j]!=0&&g.edges[k][j]<lowcost[j]){ lowcost[j]=g.edges[k][j]; closest[j]=k; } } } } -
克鲁斯卡尔算法:
void Kruskal(MGraph g){ int i,j,u1,v1,sn1,sn2,k; int vset[MAXV]; Edge E[MaxSize]; k=0; for(i=0;i<g.n;i++){ for(j=0;j<g.n;j++){ if(g.edges[i][j]!=0&&g.edges[i][j]!=INF){ E[k].u=i;E[k].v=j; E[k].w=g.edges[i][j]; k++; } } } InsertSort(E,g,e); for(i=0;i<g.n;i++) vest[i]=i; k=1;j=0; while(k<g.n){ u1=E[j].u;v1=E[j].v; sn1=vset[u1];sn2=vset[v1]; if(sn1!=sn2){ cout<<u1,v1,E[j].w; k++; for(i=0;i<g.n;i++) if(vset[i]==sn2) vset[i]=sn1; } j++; } }
-
-
最短路径(与关键路径区分!)
-
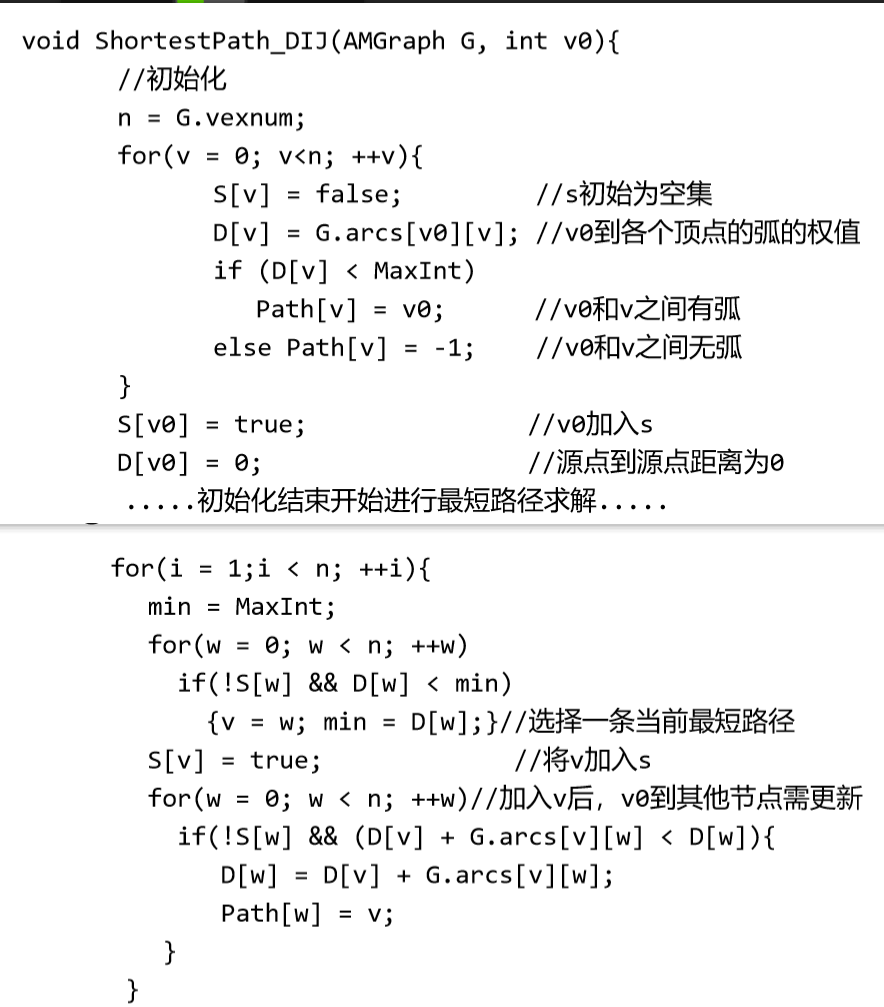
Dijkstra算法:把V分成两组: ⑴S:已求出最短路径的顶点的集合 ⑵T=V-S:尚未确定最短路径的顶点集合 将T中顶点按最短路径递增的次序加入到S中,保证:① 从源点V0到S中各顶点的最短路径长度都不大于从V0到T 中任何顶点的最短路径长度 ②每个顶点对应一个距离值: ③S中顶点:从V0到此顶点的最短路径长度 ④T中顶点:从V0到此顶点的只包括S中顶点作中间顶点的最 短路径长度
-
Floyd算法:逐个顶点试探 从vi到vj的所有可能存在的路径中,选出一条长度最 短的路径。
-
-
拓扑排序
按照有向图给出的次序关系,将图中顶点排成一个 线性序列,对于有向图中没有限定次序关系的顶点, 则可以人为加上任意的次序关系。 由此所得顶点的线性序列称之为拓扑有序序列(有向无环图)
进行拓扑排序:①从有向图中选取一个没有前驱的顶点,并输出之; ②从有向图中删去此顶点以及所有以它 为尾 的弧; ③重复上述两步,直至图空,或者图不空但找不到无 前驱的顶点为止。
-
关键路径
概念:
事件vi的最早发生时间:从开始点v1到vi的最长路 径长度。用ve(i)表示。
事件vi的最迟发生时间:在不推迟整个工期的前提 下,事件vi允许的最晚发生时间。用vl(i)表示。
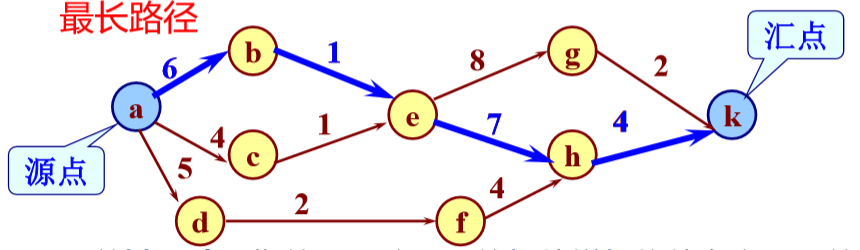
关键路径(最长路径):
三、疑难问题及解决方案
1.pta 7-6 旅游规划


#include <stdio.h>
#include <stdlib.h>
#define T 500
#define INF 999999
int main(){
int G[T][T];//存储最短距离
int p[T][T];//储存收费额
int N,M,S,D;
scanf("%d %d %d %d",&N,&M,&S,&D);
//N城市个数 M高速公路条数 S出发地编号 D目的城市编号
for(int i=0;i<N;++i){
for(int j=0;j<N;j++){
G[i][j]=INF;
p[i][j]=INF;
}
}
//初始化最短距离和收费额二维数组,当然用一个三维数组p[N][N][2]也是可以的
int c1,c2,ml,pay;
for(int i=0;i<M;i++){
scanf("%d %d %d %d",&c1,&c2,&ml,&pay);
G[c1][c2]=G[c2][c1]=ml;//输入两个城市之间的高速公路距离
p[c1][c2]=p[c2][c1]=pay;//输入两个城市高速公路的收费额
}
for(int k=0;k<N;k++){//用Floyd算法计算最短距离
for(int i=0;i<N;i++){
for(int j=0;j<N;j++){
if(i!=j&&j!=k){
if((G[i][k]+G[k][j])<G[i][j]){
G[i][j]=G[i][k]+G[k][j];
p[i][j]=p[i][k]+p[k][j];//上述第一种情况
}
else if(((G[i][k]+G[k][j])==G[i][j])&&((p[i][k]+p[k][j])<p[i][j])){
p[i][j]=p[i][k]+p[k][j];
}
}
}
}
}
printf("%d",G[S][D],p[S][D]);
}
2.其他问题:
对于图的知识点,算法较多,很容易混杂 ,就上述的算法中刚开始可以分辨清楚,多了起来之后,就会混杂在一起。可能是自我概念还比较模糊,会继续加强概念的巩固。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号