



[Havok] - Havok Physics物理引擎的学习入门
来源:http://www.cnblogs.com/hellohuan/archive/2008/09/03/1283410.html
这几天在看Intel公司刚刚收购开放下载的havok物理引擎,有几点感受。为了研究havok,多么猥琐阴险狡诈的招都被我使了出来,在google上搜过n个正则关键字,去过专业的物理研究论坛,去了havok的官方网站,去了Inter的havok论坛。最后没找到多少资料,没找到一个小例子。所以只得再havok SDKs的Doc和Demo下面逛,看英文,猜代码意图。浑浑噩噩的过了两天。
Havok的demo看过的肯定知道,框架做得相当复杂和诡异,其实并不适合去学习。The framework of the demos is very complex and esoteric. I do not want to understand these complex framework, Because I have a practical application in my framework, companies have the framework of the company, no one will want to make their own framework replaced for a physical engine.这是我发在havok论坛上的帖子。
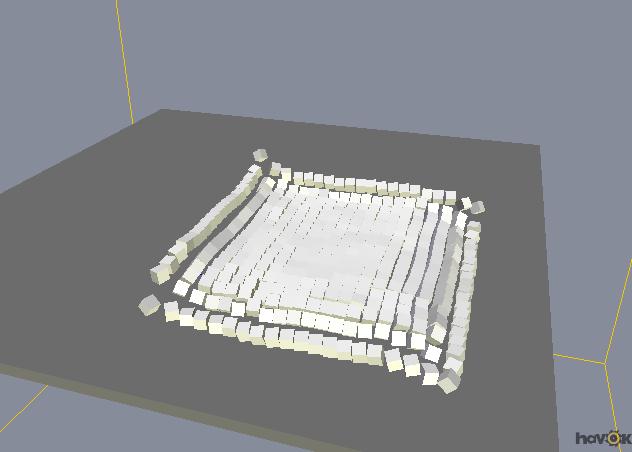
这也难怪,havok引擎刚刚开放下载,国内应用的都少,教程更是别提。我这几天算是过得比较痛苦,写个简单的入门文档,希望抛砖引玉,帮大家简单入入门,完全没有误人子弟的意思,大家别拍我~ ~我做的主要是havok的刚体碰撞。简单的20 * 20 的正方体自由下落在一平面上。
首先,关于Havok的几个简单的物理概念:
hkpWorld: havok的物理世界场景 场景有其自己的属性,如万有引力等,每个havok的仿真场景可以有一个或者多个hkpWorld的实例。
hkpRigidBody: havok的刚体,刚体可以有自己的运动属性,并能通过setMotionType来设置修改。
hkVisualDebugger: 关于havok的一个很好的调试工具
下面是整个程序的简单代码,没有用图形库输出图形,可以通过havok自带的工具VisualDebugger工具来查看刚体。省略了部分内存方面的代码,我也不是很明白。
int main(int argc, const char** argv)
{
// 创建physics world 通过填充hkpWorldCinfo
hkpWorld* physicsWorld;
{
// 创建物理世界:
hkpWorldCinfo worldInfo;
worldInfo.m_simulationType = hkpWorldCinfo::SIMULATION_TYPE_MULTITHREADED;
worldInfo.m_gravity.set(0.0f, -9.8f, 0.0f);
physicsWorld = new hkpWorld(worldInfo);
}
physicsWorld->markForWrite();
{
hkpAgentRegisterUtil::registerAllAgents( physicsWorld->getCollisionDispatcher() );
}
// 在这里创建我们的刚体模拟
setupPhysics( physicsWorld );
// 初始化VisualDebugger工具
hkVisualDebugger* vdb = setupVisualDebugger(context);
hkReal timestep = 1.f / 60.f;
int numSteps = int(60.f / timestep);
for ( int i = 0; i < numSteps; ++i )
{
// 可以得到刚体的一些实时信息,借助图形库进行渲染
hkVector4 pos = g_ball->getPosition();
printf("[%f,%f,%f]"n", pos(0), pos(1), pos(2));
}
hkBaseSystem::quit();
return 0;
}
void setupPhysics(hkpWorld* physicsWorld)
{
// 创建地面的 静态刚体
{
hkpRigidBodyCinfo boxInfo;
hkVector4 boxSize(5.0f, 0.5f , 5.0f);
hkpBoxShape* boxShape = new hkpBoxShape(boxSize);
boxInfo.m_shape = boxShape;
boxInfo.m_motionType = hkpMotion::MOTION_FIXED;
boxInfo.m_position.set(0.0f, 0.0f, 0.0f);
boxInfo.m_restitution = 0.9f;
hkpRigidBody* floor = new hkpRigidBody(boxInfo);
boxShape->removeReference();
g_ball = floor;
physicsWorld->addEntity(floor);
floor->removeReference();
}
// 创建 20 * 20 的盒子
const hkReal boxDim = 0.2f; // This is the size of the cube side of the box
const hkReal boxRadius = boxDim * 0.01f; // 盒子的角度 这个有问题 原来这个是大小
const hkReal gapx = boxDim * 0.05f; // This is the gap betwen boxes 间距是盒子大小的多少比率
const hkReal gapy = boxRadius;
const hkReal heightOffGround = 10.0f; // This is the height of the pyramid off the gound
int pyramidSize = 20; // This is the number of boxes along the base (also vertically)
// 长方体的长宽
hkReal extendedBoxDimX = boxDim + gapx;
//hkReal extendedBoxDimY = boxDim + gapy;
hkReal extendedBoxDimZ = boxDim + gapx;
hkVector4 startPos( 0.0f , heightOffGround + gapy + boxDim * 0.5f, 0.0f);
// Build pyramid 构建
{
hkVector4 boxRadii(boxDim *.5f, boxDim *.5f, boxDim *.5f);
hkpShape* boxShape = new hkpBoxShape( boxRadii , boxRadius );
// 变成横向的一块下来 20 * 20的盒子
for(int i=0; i<pyramidSize; i++)
{
// This constructs a row, from left to right 从左到右
hkVector4 start(0, 0, extendedBoxDimZ * i);
for(int j=0; j< pyramidSize; j++)
{
hkVector4 boxPos(start);
hkVector4 shift(j * extendedBoxDimX, 0.0f, 0.0f);
boxPos.setAdd4(boxPos, shift);
boxPos.setAdd4(boxPos, startPos);
hkpRigidBodyCinfo boxInfo;
//盒子的质量
boxInfo.m_mass = 100.0f;
// calculate the correct inertia 惯性与质量有关
hkReal d = boxInfo.m_mass * boxDim * boxDim / 6.0f;
// for small boxes increase inertia slightly
if ( boxRadius < 0.1f )
{
d *= 2.0f;
if ( boxRadius < 0.03f )
{
d *= 2.0f;
}
}
boxInfo.m_inertiaTensor.setDiagonal(d,d,d);
boxInfo.m_shape = boxShape;
boxInfo.m_motionType = hkpMotion::MOTION_DYNAMIC;
boxInfo.m_position = boxPos;
boxInfo.m_restitution = 0.5f; // 表面的弹力
boxInfo.m_friction = 0.6f; // 表面的摩擦
boxInfo.m_solverDeactivation = hkpRigidBodyCinfo::SOLVER_DEACTIVATION_MAX;
hkpRigidBody* boxRigidBody = new hkpRigidBody(boxInfo);
//将所有的刚体添加到世界中
physicsWorld->addEntity( boxRigidBody );
boxRigidBody->removeReference();
}
}
boxShape->removeReference();
}
}
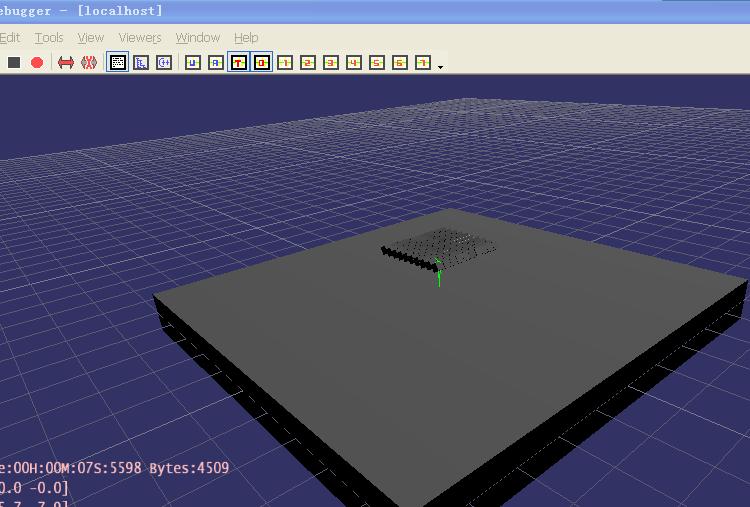
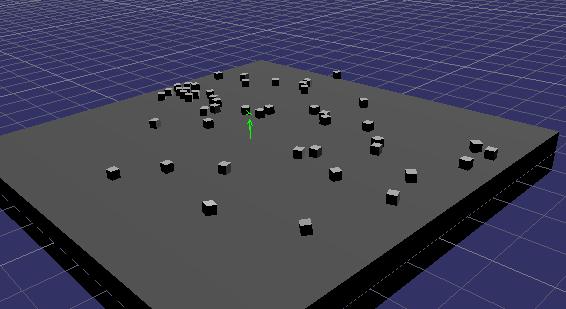
我们只要在自己的代码中调用Havok API构建抽象的物理世界,抽象的物体,即给出物理世界的数据,就能直接通过hkVisualDebugger接口的socket连接发送世界数据到HavokVisualDebugger宿主程序,并在其可视化物理场景视图中显示出来。以下是在工具下的两张截图:
在demo框架中:
程序的可运行代码:

