
第4章 UART串口通讯
第四章 UART串口通讯
1. 开发板上使用的串口
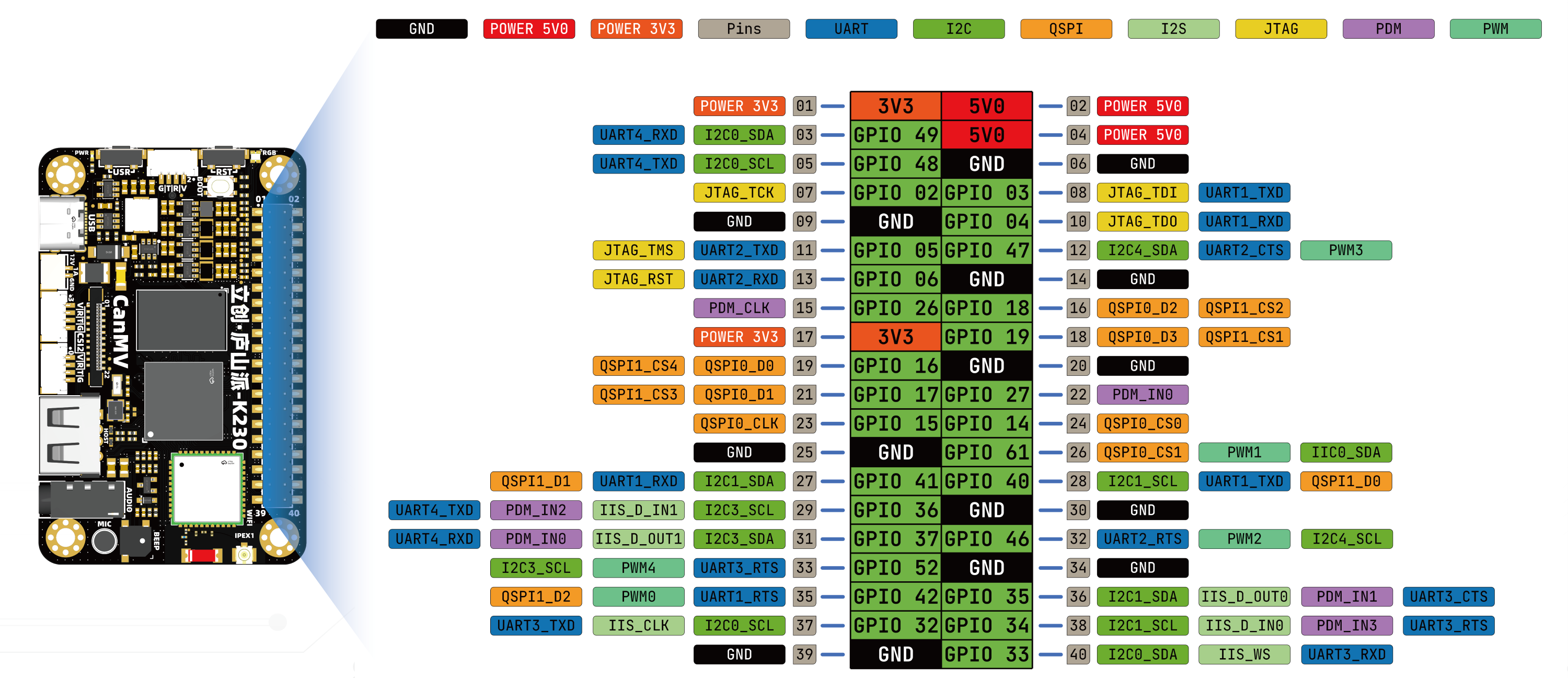
从上图中可以看到在排针处可以使用串口1,串口2,串口3,串口4。
| 排针引脚号 | 芯片引脚号 | 串口功能号 | 备注 |
|---|---|---|---|
| 03 | GPIO 49 | UART4_RXD | 同时连入摄像头2(CSI2)用作IIC通讯,板子内部有4.7K的电阻上拉至3.3V |
| 05 | GPIO 48 | UART4_TXD | 同时连入摄像头2(CSI2)用作IIC通讯,板子内部有4.7K的电阻上拉至3.3V |
| 08 | GPIO 03 | UART1_TXD | Na |
| 10 | GPIO 04 | UART1_RXD | Na |
| 11 | GPIO 05 | UART2_TXD | Na |
| 13 | GPIO 06 | UART2_RXD | Na |
| 27 | GPIO 41 | UART1_RXD | 同时连入摄像头1(CSI1)用作IIC通讯,板子内部有4.7K的电阻上拉至3.3V |
| 28 | GPIO 40 | UART1_TXD | 同时连入摄像头1(CSI1)用作IIC通讯,板子内部有4.7K的电阻上拉至3.3V |
| 29 | GPIO 36 | UART4_TXD | Na |
| 31 | GPIO 37 | UART4_RXD | Na |
| 37 | GPIO 32 | UART3_TXD | Na |
| 40 | GPIO 33 | UART3_RXD | Na |
2. UART基础配置
K230 内部集成了五个 UART(通用异步收发传输器)硬件模块,串口3(当前固件没被占用,但如果使用的是Linux+RT-Smart SDK就会被小核占用,如果用最新的CanMV固件则用户可以使用);串口0(被RT-Smart占用,最新的CanMV K230固件中只在大核中运行了RT-Smart),剩下的串口1,2,3,4均可被用户正常调用。
2.1 导入模块
from machine import UART, FPIOA
K230 = FPIOA()
K230.set_function(11, FPIOA.UART2_TXD)
K230.set_function(12, FPIOA.UART2_RXD)
2.2 构造函数
uart = UART(id, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
2.2.1 参数
id: UART 模块编号,有效值为UART.UART1、UART.UART2、UART.UART3、UART.UART4。baudrate: UART 波特率,可选参数,默认值为 115200。bits: 每个字符的数据位数,有效值为UART.FIVEBITS、UART.SIXBITS、UART.SEVENBITS、UART.EIGHTBITS,可选参数,默认值为UART.EIGHTBITS。parity: 奇偶校验,有效值为UART.PARITY_NONE、UART.PARITY_ODD、UART.PARITY_EVEN,可选参数,默认值为UART.PARITY_NONE。stop: 停止位数,有效值为UART.STOPBITS_ONE、UART.STOPBITS_TWO,可选参数,默认值为UART.STOPBITS_ONE。
2.3 init方法
uart.init(baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
配置 UART 参数。
2.4 read方法
uart.read(nbytes)
读取字符。如果指定了 nbytes,则最多读取该数量的字节;否则,将尽可能多地读取数据。
2.4.1 参数
nbytes: 最多读取的字节数,可选参数。
2.4.2 返回值
返回一个包含读取字节的字节对象。
2.5 readline方法
uart.readline()
读取一行数据,并以换行符结束。
2.5.1 返回值
返回一个包含读取字节的字节对象。
2.6 readinto方法
uart.readinto(buf, nbytes)
将字节读取到 buf 中。如果指定了 nbytes,则最多读取该数量的字节;否则,最多读取 len(buf) 数量的字节。
2.6.1 参数
buf: 一个缓冲区对象。nbytes: 最多读取的字节数,可选参数。
2.6.2 返回值
返回读取并存入 buf 的字节数。
2.7 write方法
uart.write(buf)
将字节缓冲区写入 UART。
2.7.1 参数
buf: 一个缓冲区对象。
2.7.2 返回值
返回写入的字节数。
2.8 deinit方法
uart.deinit()
释放 UART 资源。
3. UART基础使用示例
3.1 串口发送数据
3.1.1 基本发送
from machine import FPIOA, UART
import time
k230 = FPIOA()
k230.set_function(11, FPIOA.UART2_TXD)
k230.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无效验位,1位停止位
uart = UART(UART.UART2, baudrate = 115200, bits = UART.EIGHTBITS, parity = UART.PARITY_NONE, stop = UART.STOPBITS_ONE)
# 要发送的信息
ifo = "hello, k230\n"
while True:
uart.write(ifo)
time.sleep(1)
- 引脚配置:使用
FPIOA将 GPIO11 和 GPIO12 配置为 UART2 的 TXD 和 RXD 功能。 - 初始化UART:创建一个 UART2 实例,设置波特率为 115200,8 位数据位,无校验,1 位停止位。
- 发送数据:使用
uart.write()方法将数据发送出去。 - 资源释放:操作完成后,使用
uart.deinit()方法释放 UART 资源。
3.1.2 发送字节数组
有时,我们需要和其他外部设备比如STM32进行通讯就需要发送二进制数据,比如各种传感器的原始数据。可以使用字节数组或 bytes 类型的数据。
from machine import FPIOA, UART
import time
k230 = FPIOA()
k230.set_function(11, FPIOA.UART2_TXD)
k230.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无效验位,1位停止位
uart = UART(UART.UART2, baudrate = 115200, bits = UART.EIGHTBITS, parity = UART.PARITY_NONE, stop = UART.STOPBITS_ONE)
# 要发送的信息
data = bytes([0x01, 0x02, 0x03, 0x04])
while True:
uart.write(data)
time.sleep(1)
基本操作和上面类似,不过如果你还是连入串口助手进行查看数据的话,记得把串口工具的显示格式从字符串改为十六进制显示,如果连线配置等正常,你就可以在屏幕上看到01 02 03 04这些数据了。
3.1.3 连续发送数据
from machine import FPIOA, UART
import time
k230 = FPIOA()
k230.set_function(11, FPIOA.UART2_TXD)
k230.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无效验位,1位停止位
uart = UART(UART.UART2, baudrate = 115200, bits = UART.EIGHTBITS, parity = UART.PARITY_NONE, stop = UART.STOPBITS_ONE)
# 获取传感器的数据
value = 0
while True:
ifo = "Value:{}\n".format(value)
uart.write(ifo)
value = value + 1
time.sleep(1)
3.2 串口接收数据
3.2.1 基础接收
from machine import FPIOA, UART
k230 = FPIOA()
k230.set_function(11, FPIOA.UART2_TXD)
k230.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无效验位,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
# 接收到的数据
re_data = None
while re_data == None:
re_data = uart.read() # 读取数据
uart.write("UART2 Received:{}\n".format(re_data))
uart.deinit()
3.2.2 使用readline方法
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
line = b''
#如果接收不到数据就一直尝试读取
while line == b'':
# 读取数据
line = uart.read() # 尝试读取数据
#通过CanMV IDE K230中的串行终端控制台打印出来
print("Received:", line)
#通过串口2发送接收到的数据
uart.write("UART2 Received:{}\n".format(line))
# 释放UART资源
uart.deinit()
3.2.3 使用readinto方法
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
# 创建一个空的缓冲区,大小为10字节(根据需要调整大小)
buffer = bytearray(10)
# 进入循环,如果接收不到数据就一直尝试读取
bytes_received = 0 # 记录实际读取到的字节数
while bytes_received == 0:
# 使用readinto将数据读取到缓冲区
bytes_received = uart.readinto(buffer)
#通过CanMV IDE K230中的串行终端控制台打印出来
print("Received:", buffer[:bytes_received]) # 仅打印接收到的字节数内容
# 将接收到的数据通过串口2发送回去
uart.write("UART2 Received:{}\n".format(buffer[:bytes_received].decode()))
# 释放UART资源
uart.deinit()
3.2.4 连续接收数据
import time
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(11, FPIOA.UART2_TXD)
fpioa.set_function(12, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
data = b''
while True:
data = uart.read()
if data:
#通过CanMV IDE K230中的串行终端控制台打印出来
print("Received:", data)
#通过串口2发送接收到的数据
uart.write("UART2 Received:{}\n".format(data))
time.sleep(0.1) # 延时避免占用过多CPU资源
# 释放UART资源
uart.deinit()
3.3 串口接发测试
串口回环测试是验证串口发送和接收功能的有效方法。通过将 UART 的发送端(TXD)和接收端(RXD)连接在一起,可以实现自发自收,检测 UART 模块的工作情况。
from machine import FPIOA, UART
import time
# 设置 UART 引脚
k230 = FPIOA()
k230.set_function(11, FPIOA.UART2_TXD)
k230.set_function(12, FPIOA.UART2_RXD)
# 初始化 UART2,波特率115200,8位数据位,无效校验位,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
def uart_echo():
uart.write("UART Echo Test Started. Waiting for data from PC...\n")
while True:
# 读取 UART 数据(最大 64 字节),返回一个字节串
re_data = uart.read(64)
if re_data: # 如果读取到数据
uart.write(re_data) # 将数据回传
time.sleep(0.1) # 延时,防止 CPU 占用过高
try:
uart_echo()
except KeyboardInterrupt:
print("\nExiting...")
finally:
uart.deinit() # 释放 UART 资源
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18706319
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步