
第3章 PWM控制
第三章 PWM控制
1. PWM介绍
PWM(Pulse Width Modulation,脉宽调制)是一种在嵌入式系统中常用的技术,它可以用来模拟信号,控制设备的功率输出或者实现对设备的精确控制。PWM信号是一种类似于方波的信号,具有固定的频率,但脉冲宽度(占空比)可以调整。在一定频率下,我们可以通过调整这个占空比来改变他的有效电压,在一定程度上可以实现D/A转换(数字量转模拟量,不过一般来说都是用DAC,本开发板K230的DAC已经被连接到了3.5mm耳机孔上面了,可以用来播放音频)。
- 频率(Frequency):指PWM信号在一秒内循环的次数。频率是周期的倒数,单位是赫兹(Hz)。
- 周期(Period):指一个完整的PWM信号的时间长度,与频率成反比。单位是秒(s)。
- 脉宽(Pulse Width):指PWM信号中高电平(通常为1)的时间长度。单位是秒(s)或毫秒(ms)。
- 占空比(Duty Ratio):表示在一个完整的PWM信号周期内,高电平(通常为1)所占的时间比例。占空比 = (脉宽 / 周期)x 100%。
- 上升沿(Rising Edge):PWM信号从低电平跳变到高电平的瞬间,通常用来作为触发事件。
- 下降沿(Falling Edge):PWM信号从高电平跳变到低电平的瞬间,也常被用作触发事件。
- 正脉冲宽度(Positive Pulse Width):PWM信号中高电平的持续时间,一般情况下的脉宽指的就是这个。
- 负脉冲宽度(Negative Pulse Width):PWM信号中低电平的持续时间。
2. 开发板上的PWM
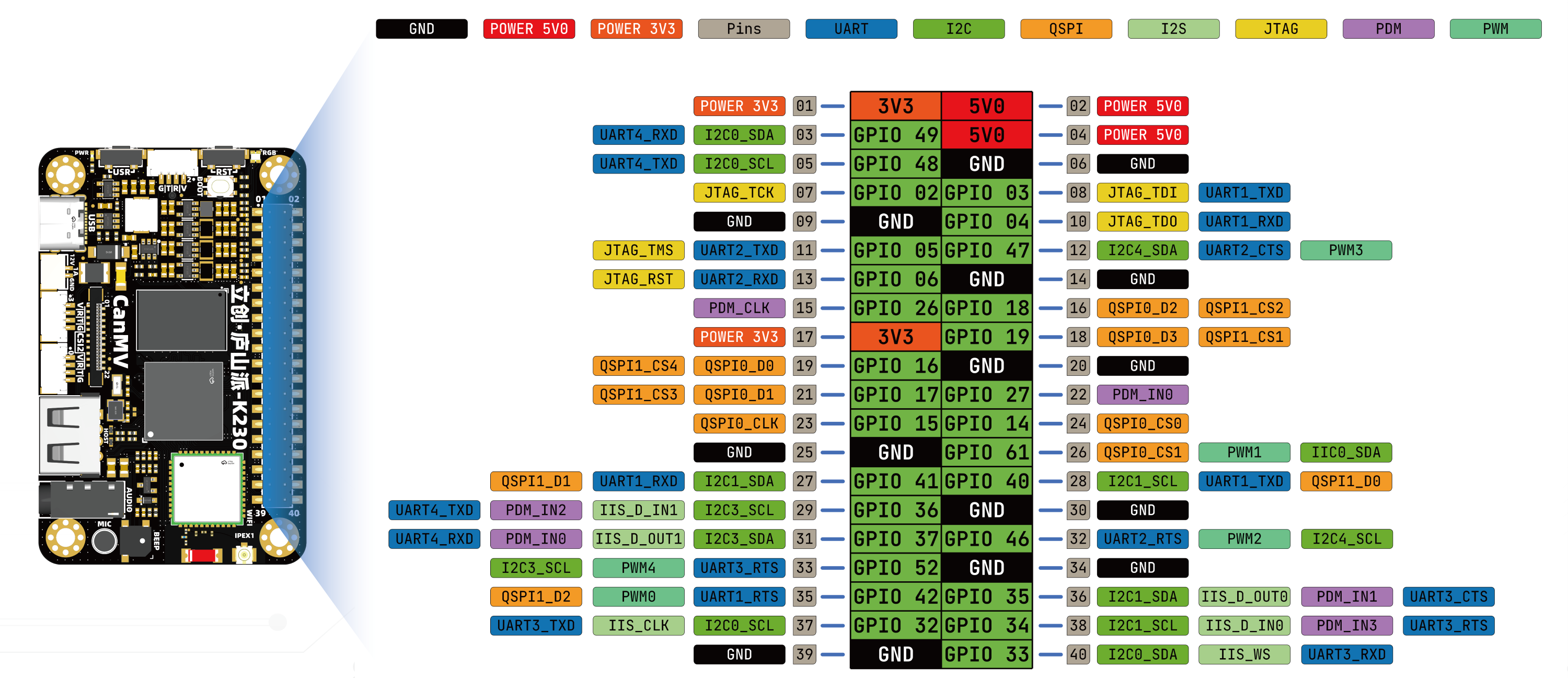
| 排针引脚号 | 芯片引脚号 | PWM通道号 |
|---|---|---|
| 12 | GPIO 47 | PWM3 |
| 26 | GPIO 61 | PWM1 |
| 32 | GPIO 46 | PWM2 |
| 33 | GPIO 52 | PWM4 |
| 35 | GPIO 42 | PWM0 |
3. PWM基础配置
3.1 引脚复用为PWM模式
先用FPIOA的set_function方法把对应GPIO配置为PWM模式。如下所示:
from machine import FPIOA
test = FPIOA()
test.set_function(47, FPIOA.PWM3)
test.set_function(61, FPIOA.PWM1)
test.set_function(46, FPIOA.PWM2)
test.set_function(52, FPIOA.PWM4)
test.set_function(42, FPIOA.PWM0)
3.2 配置PWM模块
3.2.1 导入模块
from machine import PWM
3.2.2 构造函数
用于构造pin对象,可同时对引脚进行初始化。
pwm = PWM(channel, freq, duty=50, enable=False)
3.2.2.1 参数
channel: PWM 通道号,取值范围为 [0, 5]。freq: PWM 通道输出频率。单位为Hz。duty: PWM 通道输出占空比,表示高电平在整个周期中的百分比,取值范围为 [0, 100],支持小数点。可选参数,默认值为 50。enable: PWM 通道输出是否立即使能,可选参数,默认值为 False。
3.2.3 freq方法
pwm.freq(freq)
获取或设置 PWM 通道的输出频率。
3.2.3.1 参数
freq: PWM 通道输出频率,可选参数。如果不传入参数,则返回当前频率。
3.2.3.2 返回值
返回当前 PWM 通道的输出频率或空。
3.2.4 duty方法
pwm.duty(duty)
获取或设置 PWM 通道的输出占空比。
3.2.4.1 参数
duty: PWM 通道输出占空比,可选参数。支持小数点。如果不传入参数,则返回当前占空比。
3.2.4.2 返回值
返回当前 PWM 通道的输出占空比或空
3.2.5 enable方法
pwm.enable(enable)
使能或禁用 PWM 通道的输出。
3.2.5.1 参数
enable: 是否使能 PWM 通道输出。True:1False:0
3.2.6 deinit方法
pwm.deinit()
释放 PWM 通道的资源。
4. PWM基础使用
4.1 控制引脚输出PWM信号
from machine import PWM, FPIOA
# 配置PWM输出引脚
pwm = FPIOA()
pwm.set_function(47, FPIOA.PWM3)
# 初始化PWM
pwm_start = PWM(3, 2000, 50, enable = True) # 通道3,频率2KHz,占空比50%,立即使能
4.2 控制蜂鸣器
下面代码的主要功能就是让蜂鸣器发出一个短暂的4kHz(50%占空比)声音,然后在50毫秒后关闭。
from machine import PWM, FPIOA
import time
beep = FPIOA()
beep.set_function(43, FPIOA.PWM1)
beep_pwm = PWM(1, 4000, 50, enable = False) # PWM1,4000KHz,50%,禁止立即输出使能
beep_pwm.enable(1) # 使能PWM输出
time.sleep_ms(50)
beep_pwm.enable(0) # 关闭PWM
beep_pwm.deinit() # 释放PWM
开头就是导入time库用来延时,PWM用来控制引脚输出PWM信号,FPIOA用来将引脚复用为PWM功能。
接下来实例化FPIOA,设置蜂鸣器的驱动脚GPIO43为PWM通道1输出模式。设置频率为4KHz,占空比为50%,enable=False表示初始化时关闭PWM输出,即默认状态下蜂鸣器不发声。接下来调用beep_pwm.enable(1)让蜂鸣器开始发出4Khz的声音,延时50ms后先关闭PWM输出,来停止蜂鸣器的发声,最后释放一下PWM通道资源,防止在不断电的情况下继续运行其他程序造成的资源占用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号