第2章 GPIO与FPIOA
第二章 GPIO与FPIOA
1. 导入
- GPIO就是我们常说的IO引脚,它直接从芯片上引出,可以被设置为输入或输出信号。没有额外功能的GPIO主要用来控制简单的设备,比如点亮LED灯或者读取按键的状态。
- FPIOA是一种灵活的输入输出阵列,允许芯片对IO功能进行重新配置,类似用STM32上的复用引脚,也就是说不同的引脚可以根据需求重新定义。
- iomux就是引脚复用了,主要是配置物理PAD(管脚)的功能,由于soc功能多管脚(pads)少,多个功能共享同一个I/O管脚(pads),但是一个pads同一时间只能使用其中一个功能,所以需要IOMUX进行功能选择。IOMUX也叫FPIOA,Pin multiplexing,管脚功能选择等,在K230中,FPIOA就是iomux。
- 我们使用 MicroPython 语法来控制K230的引脚,
machine.Pin模块用于控制微控制器的 GPIO 引脚。Pin类提供了访问和控制硬件引脚的功能,主要包括配置引脚模式,读写引脚状态等
2. 各引脚的复用功能
from machine import FPIOA
IO = FPIOA()
IO.help()
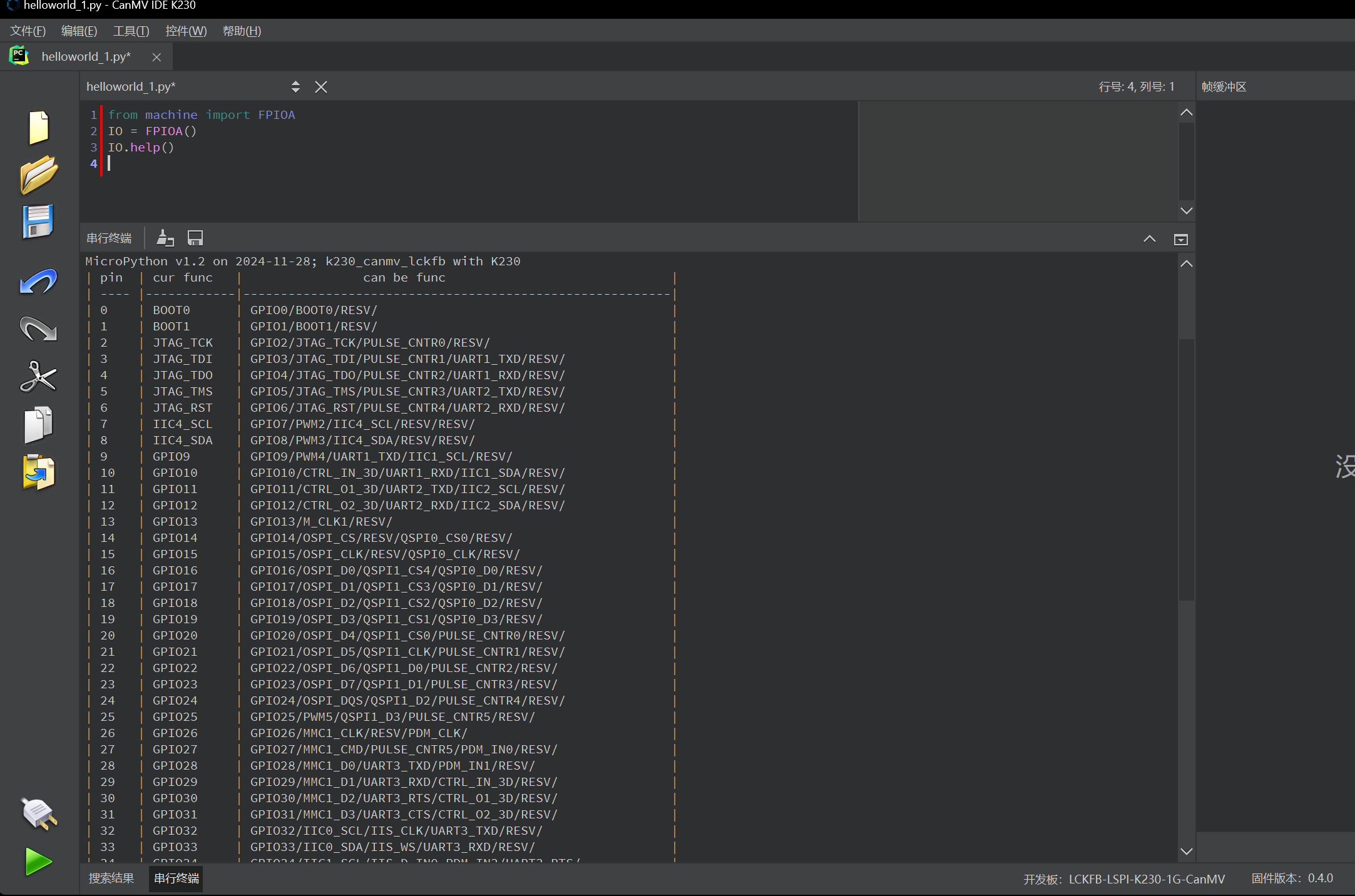
| pin | cur func | can be func |
|---|---|---|
| 0 | GPIO0 | GPIO0/BOOT0/RESV/ |
| 1 | GPIO1 | GPIO1/BOOT1/RESV/ |
| 2 | JTAG_TCK | GPIO2/JTAG_TCK/PULSE_CNTR0/RESV/ |
| 3 | JTAG_TDI | GPIO3/JTAG_TDI/PULSE_CNTR1/UART1_TXD/RESV/ |
| 4 | JTAG_TDO | GPIO4/JTAG_TDO/PULSE_CNTR2/UART1_RXD/RESV/ |
| 5 | UART2_TXD | GPIO5/JTAG_TMS/PULSE_CNTR3/UART2_TXD/RESV/ |
| 6 | UART2_RXD | GPIO6/JTAG_RST/PULSE_CNTR4/UART2_RXD/RESV/ |
| 7 | PWM2 | GPIO7/PWM2/IIC4_SCL/RESV/RESV/ |
| 8 | PWM3 | GPIO8/PWM3/IIC4_SDA/RESV/RESV/ |
| 9 | PWM4 | GPIO9/PWM4/UART1_TXD/IIC1_SCL/RESV/ |
| 10 | CTRL_IN_3D | GPIO10/CTRL_IN_3D/UART1_RXD/IIC1_SDA/RESV/ |
| 11 | CTRL_O1_3D | GPIO11/CTRL_O1_3D/UART2_TXD/IIC2_SCL/RESV/ |
| 12 | CTRL_O2_3D | GPIO12/CTRL_O2_3D/UART2_RXD/IIC2_SDA/RESV/ |
| 13 | M_CLK1 | GPIO13/M_CLK1/RESV/ |
| 14 | OSPI_CS | GPIO14/OSPI_CS/RESV/QSPI0_CS0/RESV/ |
| 15 | OSPI_CLK | GPIO15/OSPI_CLK/RESV/QSPI0_CLK/RESV/ |
| 16 | OSPI_D0 | GPIO16/OSPI_D0/QSPI1_CS4/QSPI0_D0/RESV/ |
| 17 | OSPI_D1 | GPIO17/OSPI_D1/QSPI1_CS3/QSPI0_D1/RESV/ |
| 18 | OSPI_D2 | GPIO18/OSPI_D2/QSPI1_CS2/QSPI0_D2/RESV/ |
| 19 | OSPI_D3 | GPIO19/OSPI_D3/QSPI1_CS1/QSPI0_D3/RESV/ |
| 20 | GPIO20 | GPIO20/OSPI_D4/QSPI1_CS0/PULSE_CNTR0/RESV/ |
| 21 | OSPI_D5 | GPIO21/OSPI_D5/QSPI1_CLK/PULSE_CNTR1/RESV/ |
| 22 | OSPI_D6 | GPIO22/OSPI_D6/QSPI1_D0/PULSE_CNTR2/RESV/ |
| 23 | GPIO23 | GPIO23/OSPI_D7/QSPI1_D1/PULSE_CNTR3/RESV/ |
| 24 | GPIO24 | GPIO24/OSPI_DQS/QSPI1_D2/PULSE_CNTR4/RESV/ |
| 25 | GPIO25 | GPIO25/PWM5/QSPI1_D3/PULSE_CNTR5/RESV/ |
| 26 | PDM_CLK | GPIO26/MMC1_CLK/RESV/PDM_CLK/ |
| 27 | GPIO27 | GPIO27/MMC1_CMD/PULSE_CNTR5/PDM_IN0/RESV/ |
| 28 | GPIO28 | GPIO28/MMC1_D0/UART3_TXD/PDM_IN1/RESV/ |
| 29 | GPIO29 | GPIO29/MMC1_D1/UART3_RXD/CTRL_IN_3D/RESV/ |
| 30 | GPIO30 | GPIO30/MMC1_D2/UART3_RTS/CTRL_O1_3D/RESV/ |
| 31 | GPIO31 | GPIO31/MMC1_D3/UART3_CTS/CTRL_O2_3D/RESV/ |
| 32 | IIS_CLK | GPIO32/IIC0_SCL/IIS_CLK/UART3_TXD/RESV/ |
| 33 | IIS_WS | GPIO33/IIC0_SDA/IIS_WS/UART3_RXD/RESV/ |
| 34 | IIS_D_IN0 | GPIO34/IIC1_SCL/IIS_D_IN0/PDM_IN3/UART3_RTS/ |
| 35 | IIS_D_OUT0 | GPIO35/IIC1_SDA/IIS_D_OUT0/PDM_IN1/UART3_CTS/ |
| 36 | GPIO36 | GPIO36/IIC3_SCL/IIS_D_IN1/PDM_IN2/UART4_TXD/ |
| 37 | GPIO37 | GPIO37/IIC3_SDA/IIS_D_OUT1/PDM_IN0/UART4_RXD/ |
| 38 | UART0_TXD | GPIO38/UART0_TXD/RESV/QSPI1_CS0/HSYNC0/ |
| 39 | UART0_RXD | GPIO39/UART0_RXD/RESV/QSPI1_CLK/VSYNC0/ |
| 40 | IIC1_SCL | GPIO40/UART1_TXD/IIC1_SCL/QSPI1_D0/RESV/ |
| 41 | IIC1_SDA | GPIO41/UART1_RXD/IIC1_SDA/QSPI1_D1/RESV/ |
| 42 | GPIO42 | GPIO42/UART1_RTS/PWM0/QSPI1_D2/RESV/ |
| 43 | GPIO43 | GPIO43/UART1_CTS/PWM1/QSPI1_D3/RESV/ |
| 44 | IIC3_SCL | GPIO44/UART2_TXD/IIC3_SCL/RESV/SPI2AXI_CK/ |
| 45 | IIC3_SDA | GPIO45/UART2_RXD/IIC3_SDA/RESV/SPI2AXI_CS/ |
| 46 | IIC4_SCL | GPIO46/UART2_RTS/PWM2/IIC4_SCL/RESV/ |
| 47 | IIC4_SDA | GPIO47/UART2_CTS/PWM3/IIC4_SDA/RESV/ |
| 48 | IIC0_SCL | GPIO48/UART4_TXD/RESV/IIC0_SCL/SPI2AXI_DI/ |
| 49 | IIC0_SDA | GPIO49/UART4_RXD/RESV/IIC0_SDA/SPI2AXI_DO/ |
| 50 | UART3_TXD | GPIO50/UART3_TXD/IIC2_SCL/QSPI0_CS4/RESV/ |
| 51 | UART3_RXD | GPIO51/UART3_RXD/IIC2_SDA/QSPI0_CS3/RESV/ |
| 52 | GPIO52 | GPIO52/UART3_RTS/PWM4/IIC3_SCL/RESV/ |
| 53 | GPIO53 | GPIO53/UART3_CTS/PWM5/IIC3_SDA/ |
| 54 | MMC1_CMD | GPIO54/QSPI0_CS0/MMC1_CMD/PWM0/RESV/ |
| 55 | MMC1_CLK | GPIO55/QSPI0_CLK/MMC1_CLK/PWM1/RESV/ |
| 56 | MMC1_D0 | GPIO56/QSPI0_D0/MMC1_D0/PWM2/RESV/ |
| 57 | MMC1_D1 | GPIO57/QSPI0_D1/MMC1_D1/PWM3/RESV/ |
| 58 | MMC1_D2 | GPIO58/QSPI0_D2/MMC1_D2/PWM4/RESV/ |
| 59 | MMC1_D3 | GPIO59/QSPI0_D3/MMC1_D3/PWM5/ |
| 60 | GPIO60 | GPIO60/PWM0/IIC0_SCL/QSPI0_CS2/HSYNC1/ |
| 61 | GPIO61 | GPIO61/PWM1/IIC0_SDA/QSPI0_CS1/VSYNC1/ |
| 62 | M_CLK2 | GPIO62/M_CLK2/UART3_DE/RESV/ |
| 63 | M_CLK3 | GPIO63/M_CLK3/UART3_RE/RESV/ |
3. GPIO基础使用
3.1 使用FPIOA
FPIOA(灵活外设输入/输出阵列)是 K230 CanMV 系列微处理器提供的功能,允许用户灵活配置引脚来连接不同的外设。通过这个模块,我们可以轻松管理各种硬件接口。FPIOA 可以允许用户根据需要,将特定的引脚分配给不同的功能(比如 SPI、I2C、UART 等),每个引脚在同一时刻只能激活一种功能。使用 FPIOA,可以简化引脚管理,提升芯片的灵活性。
3.1.1 构造函数
from machine import FPIOA
test = FPIOA()
3.1.2 设置引脚
test.set_function(pin, func, ie=-1, oe=-1, pu=-1, pd=-1, st=-1, sl=-1, ds=-1)
3.1.2.1 参数:
pin: 要配置的引脚编号,范围:[0, 63]func: 要分配给引脚的功能代码- 普通GPIO:
FPIOA.GPIO0,FPIOA.GPIO1,FPIOA.GPIO2等,范围[0,63] - 串口:
FPIOA.UART0_TXD,FPIOA.UART0_RXD,FPIOA.UART1_RXD等。 - IIC:
FPIOA.IIC0_SCL,FPIOA.IIC0_SDA,FPIOA.IIC1_SCL,FPIOA.IIC1_SDA等。 - PWM:
FPIOA.PWM0,FPIOA.PWM1,FPIOA.PWM2等。
- 普通GPIO:
3.1.2.2 更多可选参数:
ie: 输入使能,可选参数(-1为默认值,0为不使能,1为使能)oe: 输出使能,可选参数(-1为默认值,0为不使能,1为使能)pu: 上拉使能,可选参数(-1为默认值,0为不使能,1为使能)pd: 下拉使能,可选参数(-1为默认值,0为不使能,1为使能)st: st 使能,可选参数(-1为默认值,0为不使能,1为使能)- 输入施密特触发器控制使能,使能后提高信号的干扰抵抗能力和改善信号的完整性,简单来说,施密特触发器是一种具有滞回特性的电子电路,其输出只在输入信号超过设定的正向或负向阈值时改变,提高了对噪声的抗干扰能力。
sl: sl 使能,可选参数(-1为默认值,0为不使能,1为使能)- 目前已经不再使用,建议直接设置为-1.
ds: 驱动电流能力,可选参数(-1为默认值)- 默认值为
7,范围0-15,数值越大IO的驱动能力越强,除了boot 0 1其他引脚都可以设置最大15。
- 默认值为
3.1.3 读取引脚
test.get_pin_func(pin)
test.get_pin_num(func) # 获取指定功能当前所在的引脚
3.1.3.1 参数:
pin: 要配置的引脚编号,范围:[0, 63]。
3.1.3.2 返回值:
返回引脚当前的功能号。
3.1.3.3 示例
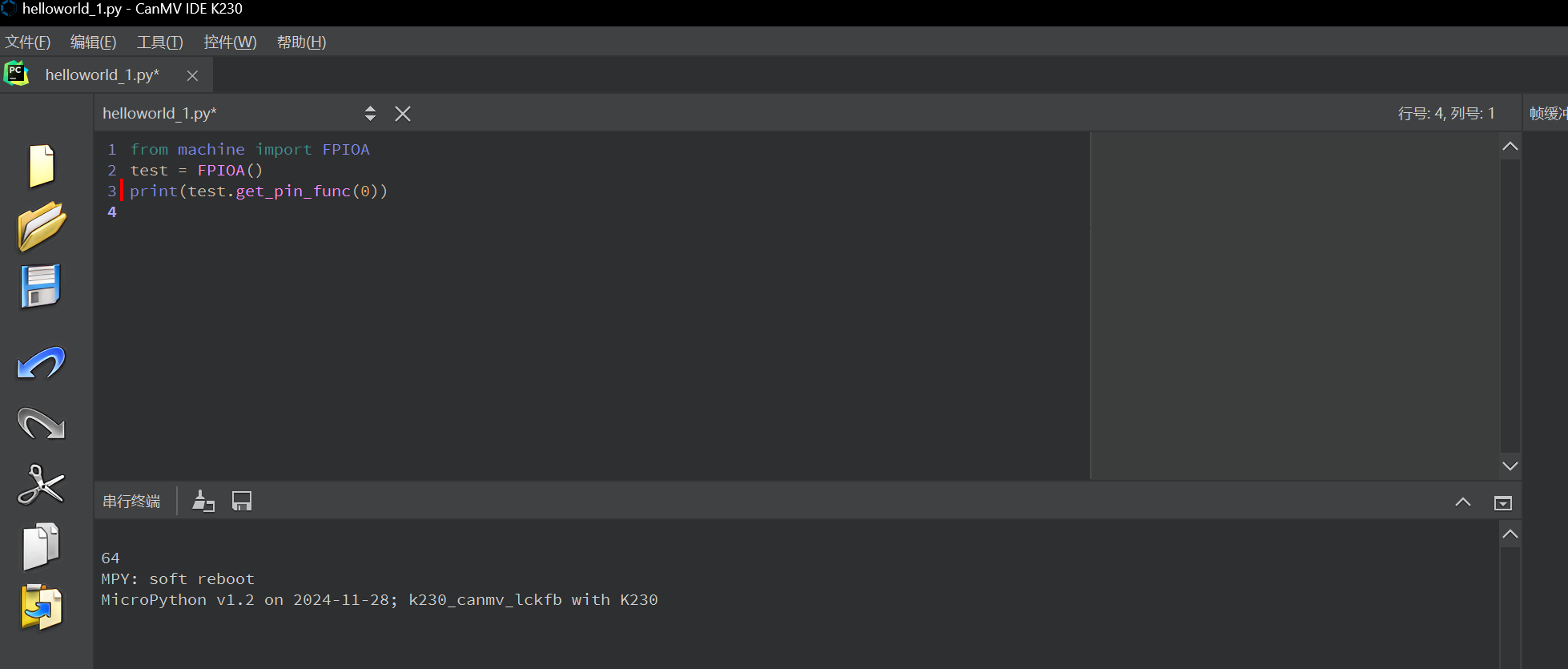
其运行结果打印出来的数值为64,结合下方表格,可知64代表当前引脚的功能为 BOOT0
| 序号 | 功能名 |
|---|---|
| 0 | GPIO0 |
| 1 | GPIO1 |
| 2 | GPIO2 |
| 3 | GPIO3 |
| 4 | GPIO4 |
| 5 | GPIO5 |
| 6 | GPIO6 |
| 7 | GPIO7 |
| 8 | GPIO8 |
| 9 | GPIO9 |
| 10 | GPIO10 |
| 11 | GPIO11 |
| 12 | GPIO12 |
| 13 | GPIO13 |
| 14 | GPIO14 |
| 15 | GPIO15 |
| 16 | GPIO16 |
| 17 | GPIO17 |
| 18 | GPIO18 |
| 19 | GPIO19 |
| 20 | GPIO20 |
| 21 | GPIO21 |
| 22 | GPIO22 |
| 23 | GPIO23 |
| 24 | GPIO24 |
| 25 | GPIO25 |
| 26 | GPIO26 |
| 27 | GPIO27 |
| 28 | GPIO28 |
| 29 | GPIO29 |
| 30 | GPIO30 |
| 31 | GPIO31 |
| 32 | GPIO32 |
| 33 | GPIO33 |
| 34 | GPIO34 |
| 35 | GPIO35 |
| 36 | GPIO36 |
| 37 | GPIO37 |
| 38 | GPIO38 |
| 39 | GPIO39 |
| 40 | GPIO40 |
| 41 | GPIO41 |
| 42 | GPIO42 |
| 43 | GPIO43 |
| 44 | GPIO44 |
| 45 | GPIO45 |
| 46 | GPIO46 |
| 47 | GPIO47 |
| 48 | GPIO48 |
| 49 | GPIO49 |
| 50 | GPIO50 |
| 51 | GPIO51 |
| 52 | GPIO52 |
| 53 | GPIO53 |
| 54 | GPIO54 |
| 55 | GPIO55 |
| 56 | GPIO56 |
| 57 | GPIO57 |
| 58 | GPIO58 |
| 59 | GPIO59 |
| 60 | GPIO60 |
| 61 | GPIO61 |
| 62 | GPIO62 |
| 63 | GPIO63 |
| 64 | BOOT0 |
| 65 | BOOT1 |
| 66 | CI0 |
| 67 | CI1 |
| 68 | CI2 |
| 69 | CI3 |
| 70 | CO0 |
| 71 | CO1 |
| 72 | CO2 |
| 73 | CO3 |
| 74 | DI0 |
| 75 | DI1 |
| 76 | DI2 |
| 77 | DI3 |
| 78 | DO0 |
| 79 | DO1 |
| 80 | DO2 |
| 81 | DO3 |
| 82 | HSYNC0 |
| 83 | HSYNC1 |
| 84 | IIC0_SCL |
| 85 | IIC0_SDA |
| 86 | IIC1_SCL |
| 87 | IIC1_SDA |
| 88 | IIC2_SCL |
| 89 | IIC2_SDA |
| 90 | IIC3_SCL |
| 91 | IIC3_SDA |
| 92 | IIC4_SCL |
| 93 | IIC4_SDA |
| 94 | IIS_CLK |
| 95 | IIS_D_IN0_PDM_IN3 |
| 96 | IIS_D_IN1_PDM_IN2 |
| 97 | IIS_D_OUT0_PDM_IN1 |
| 98 | IIS_D_OUT1_PDM_IN0 |
| 99 | IIS_WS |
| 100 | JTAG_RST |
| 101 | JTAG_TCK |
| 102 | JTAG_TDI |
| 103 | JTAG_TDO |
| 104 | JTAG_TMS |
| 105 | M_CLK1 |
| 106 | M_CLK2 |
| 107 | M_CLK3 |
| 108 | MMC1_CLK |
| 109 | MMC1_CMD |
| 110 | MMC1_D0 |
| 111 | MMC1_D1 |
| 112 | MMC1_D2 |
| 113 | MMC1_D3 |
| 114 | OSPI_CLK |
| 115 | OSPI_CS |
| 116 | OSPI_D0 |
| 117 | OSPI_D1 |
| 118 | OSPI_D2 |
| 119 | OSPI_D3 |
| 120 | OSPI_D4 |
| 121 | OSPI_D5 |
| 122 | OSPI_D6 |
| 123 | OSPI_D7 |
| 124 | OSPI_DQS |
| 125 | PDM_IN0 |
| 126 | PDM_IN1 |
| 127 | PDM_IN2 |
| 128 | PDM_IN3 |
| 129 | PULSE_CNTR0 |
| 130 | PULSE_CNTR1 |
| 131 | PULSE_CNTR2 |
| 132 | PULSE_CNTR3 |
| 133 | PULSE_CNTR4 |
| 134 | PULSE_CNTR5 |
| 135 | PWM0 |
| 136 | PWM1 |
| 137 | PWM2 |
| 138 | PWM3 |
| 139 | PWM4 |
| 140 | PWM5 |
| 141 | QSPI0_CLK |
| 142 | QSPI0_CS0 |
| 143 | QSPI0_CS1 |
| 144 | QSPI0_CS2 |
| 145 | QSPI0_CS3 |
| 146 | QSPI0_CS4 |
| 147 | QSPI0_D0 |
| 148 | QSPI0_D1 |
| 149 | QSPI0_D2 |
| 150 | QSPI0_D3 |
| 151 | QSPI1_CLK |
| 152 | QSPI1_CS0 |
| 153 | QSPI1_CS1 |
| 154 | QSPI1_CS2 |
| 155 | QSPI1_CS3 |
| 156 | QSPI1_CS4 |
| 157 | QSPI1_D0 |
| 158 | QSPI1_D1 |
| 159 | QSPI1_D2 |
| 160 | QSPI1_D3 |
| 161 | SPI2AXI_CK |
| 162 | SPI2AXI_CS |
| 163 | SPI2AXI_DI |
| 164 | SPI2AXI_DO |
| 165 | UART0_RXD |
| 166 | UART0_TXD |
| 167 | UART1_CTS |
| 168 | UART1_RTS |
| 169 | UART1_RXD |
| 170 | UART1_TXD |
| 171 | UART2_CTS |
| 172 | UART2_RTS |
| 173 | UART2_RXD |
| 174 | UART2_TXD |
| 175 | UART3_CTS |
| 176 | UART3_DE |
| 177 | UART3_RE |
| 178 | UART3_RTS |
| 179 | UART3_RXD |
| 180 | UART3_TXD |
| 181 | UART4_RXD |
| 182 | UART4_TXD |
| 183 | PDM_CLK |
| 184 | VSYNC0 |
| 185 | VSYNC1 |
| 186 | CTRL_IN_3D |
| 187 | CTRL_O1_3D |
| 188 | CTRL_O2_3D |
| 189 | TEST_PIN0 |
| 190 | TEST_PIN1 |
| 191 | TEST_PIN2 |
| 192 | TEST_PIN3 |
| 193 | TEST_PIN4 |
| 194 | TEST_PIN5 |
| 195 | TEST_PIN6 |
| 196 | TEST_PIN7 |
| 197 | TEST_PIN8 |
| 198 | TEST_PIN9 |
| 199 | TEST_PIN10 |
| 200 | TEST_PIN11 |
| 201 | TEST_PIN12 |
| 202 | TEST_PIN13 |
| 203 | TEST_PIN14 |
| 204 | TEST_PIN15 |
| 205 | TEST_PIN16 |
| 206 | TEST_PIN17 |
| 207 | TEST_PIN18 |
| 208 | TEST_PIN19 |
| 209 | TEST_PIN20 |
| 210 | TEST_PIN21 |
| 211 | TEST_PIN22 |
| 212 | TEST_PIN23 |
| 213 | TEST_PIN24 |
| 214 | TEST_PIN25 |
| 215 | TEST_PIN26 |
| 216 | TEST_PIN27 |
| 217 | TEST_PIN28 |
| 218 | TEST_PIN29 |
| 219 | TEST_PIN30 |
| 220 | TEST_PIN31 |
| 221 | FUNC_MAX |
3.1.4 获取引脚信息
test.help([number, func=False])
打印引脚配置提示信息。
3.1.4.1 参数
number: 引脚号或功能号, 可选参数func: 是否启用功能号查询,默认为False
3.1.4.2 返回值
可能为以下三种:
- 所有引脚的配置信息(未设置
number) - 指定引脚的详细配置信息(设置了
number,未设置func或设置为False) - 指定功能的所有可配置引脚号(设置了
number,并将func设置为True)
3.1.4.3 示例

3.2 使用machine.Pin
machine.Pin 类是 MicroPython 中用于控制输入/输出引脚的核心模块。通过该模块,我们可以轻松地管理微控制器上的 GPIO 引脚,进行基础的输入输出操作。
3.2.1 构造函数/初始化引脚
pin = Pin(index, mode, pull=Pin.PULL_NONE, drive=7)
用于构造pin对象,可同时对引脚进行初始化。
3.2.1.1 参数
index: 引脚编号,范围为 [0, 63]。mode: 引脚的模式,支持输入模式或输出模式。Pin.OUTPin.IN
pull: 上下拉配置(可选),默认为Pin.PULL_NONE。Pin.PULL_NONEPin.PULL_UPPin.PULL_DOWN
drive: 驱动能力配置(可选),默认值为 7。- 默认值为
7,范围0-15,数值越大IO的驱动能力越强,除了boot 0 1其他引脚都可以设置最大15。
- 默认值为
3.2.1.2 示例
from machine import Pin
pin = Pin(1, Pin.OUT, pill = Pin.PULL_NONE, drive = 15)
3.2.2 控制Pin
3.2.2.1 value方法
pin.value(x)
获取引脚的输入电平值或设置引脚的输出电平。
参数:
value: 输出值(可选),如果传递该参数则设置引脚输出为指定值。如果不传参则返回引脚的当前输入电平值。- 0:输出低电平。
- 1:输出高电平。
示例:
from machine import Pin
pin.value(1) # 设置输出高电平
pin.value(0) # 设置输出低电平
print(pin.value()) # 获取电平
3.2.2.2 mode方法
pin.mode(x)
主要用来获取或设置引脚的模式。
参数:
mode: 引脚模式(输入或输出),如果不传参则返回当前引脚的模式。Pin.OUTPin.IN
示例:
from machine import Pin
pin.mode(Pin.IN) # 配置为输入模式
pin.mode(Pin.OUT) # 配置为输出模式
print(pin.mode())
3.2.2.3 pull方法
pin.pull(x)
获取或设置引脚的上下拉配置。
参数:
pull: 上下拉配置(可选),如果不传参则返回当前上下拉配置。
示例:
from machine import Pin
pin.pull(Pin.PULL_NONE)
pin.pull(Pin.PULL_UP)
pin.pull(Pin.PULL_DOWM)
print(pin.pull())
3.2.2.4 drive方法
pin.drive(x)
获取或设置引脚的驱动能力。
3.2.2.5 on方法
pin.on()
将引脚输出设置为高电平。
3.2.2.6 off方法
pin.off()
将引脚输出设置为低电平。
3.2.2.7 high方法
pin.high()
将引脚输出设置为高电平。
3.2.2.8 low方法
pin.low()
将引脚输出设置为低电平。
4. 点亮RGB灯
4.1 LED闪烁实验
from machine import Pin
from machine import FPIOA
import time
# 创建对象
RGB = FPIOA()
# 初始化引脚,作为普通的IO
RGB.set_function(62, FPIOA.GPIO62)
RGB.set_function(20, FPIOA.GPIO20)
RGB.set_function(63, FPIOA.GPIO63)
# 配置IO输出
R = Pin(62, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
G = Pin(20, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
B = Pin(63, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
# 初始化全灭,开发板上的RGB低电平点亮
R.high()
G.high()
B.high()
# 选择RGB颜色绿色
LED = G
while True:
LED.low()
time.sleep(1)
LED.high()
time.sleep(1)
将对应LED灯的GPIO初始化为普通GPIO后实例化了这三个GPIO引脚,分别用于控制RGB灯的红、绿和蓝三种颜色的LED灯,都指定了对应的引脚号,输出模式,不使用上下拉,输出能力。
接下来初始化了LED灯的状态,通过让每个灯的控制引脚变为高电平来熄灭所有LED灯。
4.2 流水灯
from machine import Pin
from machine import FPIOA
import time
# 创建对象
RGB = FPIOA()
# 初始化引脚,作为普通的IO
RGB.set_function(62, FPIOA.GPIO62)
RGB.set_function(20, FPIOA.GPIO20)
RGB.set_function(63, FPIOA.GPIO63)
# 配置IO输出
R = Pin(62, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
G = Pin(20, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
B = Pin(63, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
# 设置颜色函数
def set_color(r, g, b):
if r == 0:
R.low()
else:
R.high()
if g == 0:
G.low()
else:
G.high()
if b == 0:
B.low()
else:
B.high()
# LDE亮一会儿灭
def delay_color(r, g, b, delay):
set_color(r, g, b)
time.sleep(delay)
set_color(1, 1, 1)
time.sleep(delay)
while True:
# 红色
delay_color(0, 1, 1, 0.5)
# 绿色
delay_color(1, 0, 1, 0.5)
# 蓝色
delay_color(1, 1, 0, 0.5)
# 黄色(红+绿)
delay_color(0, 0, 1, 0.5)
# 紫色(红+蓝)
delay_color(0, 1, 0, 0.5)
# 青色(绿+蓝)
delay_color(1, 0, 0, 0.5)
# 白色(红+绿+蓝)
delay_color(0, 0, 0, 0.5)
5. 按键控制
5.1 按键控制LED开关
from machine import Pin
from machine import FPIOA
import time
# 创建FPIOA对象,初始化GPIO
LED = FPIOA()
LED.set_function(62, FPIOA.GPIO62)
LED.set_function(20, FPIOA.GPIO20)
LED.set_function(63, FPIOA.GPIO63)
LED.set_function(53, FPIOA.GPIO53)
# 配置三色灯
R = Pin(62, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
G = Pin(20, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
B = Pin(63, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
# 配置按键
button = Pin(53, Pin.IN, Pin.PULL_DOWN)
R.high()
G.high()
B.high()
# 选择颜色
RGB = B # 蓝
while True:
if button.value() == 1: # 按键按下
RGB.high()
else:
RGB.low()
前半部分和我们在前面学习的点亮RGB灯是一样的,就是初始化灯对应的引脚。不同的是我们这里还对按键用到的GPIO(Pin53)进行了初始化,引脚62、20和63将用于控制LED灯,而引脚53将用于读取按钮的状态,将控制LED灯的引脚设置为了输出模式,将读取按钮的GPIO设置为了输入模式。
然后把按钮配置为了下拉输入模式,代表当按钮没有被按下是,输入信号为低电平(0),按下时为高电平(1)。
可以看到我们这里并没有进行按键消抖处理,这里按钮的作用是直接控制LED灯的熄灭,而不是在不同状态之间切换。当我们按下按钮时,LED灯熄灭;而当我们释放按钮时,LED灯将再次点亮。在上面的程序中,我们关注的是按钮是否被按下(按下就熄灭LED灯),而不是按钮有没有改变状态。如果我们需要判断按钮的改变状态来切换LED灯状态,就必须要进行消抖处理了,详情请看下面的程序。
5.2 按键控制LED状态
from machine import Pin
from machine import FPIOA
import time
# 创建FPIOA对象,初始化GPIO
LED = FPIOA()
LED.set_function(62, FPIOA.GPIO62)
LED.set_function(20, FPIOA.GPIO20)
LED.set_function(63, FPIOA.GPIO63)
LED.set_function(53, FPIOA.GPIO53)
# 配置三色灯
R = Pin(62, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
G = Pin(20, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
B = Pin(63, Pin.OUT, pull = Pin.PULL_NONE, drive = 15)
# 配置按键
button = Pin(53, Pin.IN, Pin.PULL_DOWN)
R.high()
G.high()
B.high()
RGB = B
# 按键消抖
button_delay = 20 # 20ms
press_time = 0 # 记录按下的时间
led_flag = False # 记录LED状态,False表示灭
button_flag = 0 # 记录按键状态
while True:
button_state = button.value() # 获取当前按键状态
current_time = time.ticks_ms() # 获取当前时间
# 按键 0->1 代表按下,也就是检测上升沿
if button_state == 1 and button_flag == 0:
# 检测消抖时间
if current_time - press_time > button_delay:
if led_flag:
RGB.high()
else:
RGB.low()
led_flag = not led_flag # 翻转LED状态
press_time = current_time # 更新按键按下时间
button_flag = button_state # 更新按键状态
time.sleep_ms(10)
首先获取当前按钮状态和时间。如果按钮的状态从未按下(0,低电平)变为按下(1,高电平),且在消抖延迟后,程序将切换LED的状态(点亮或熄灭),然后更新LED当前状态和最后按键按下的时间。
这个程序最重要的改进就是进行了按键的消抖,确保每次按钮的状态变化都有效,避免由于机械抖动造成的错误信号。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号