
第13章 SPI-读写FLASH
第十三章 SPI-读写FLASH
1. 硬件设计
1.1 SPI简介
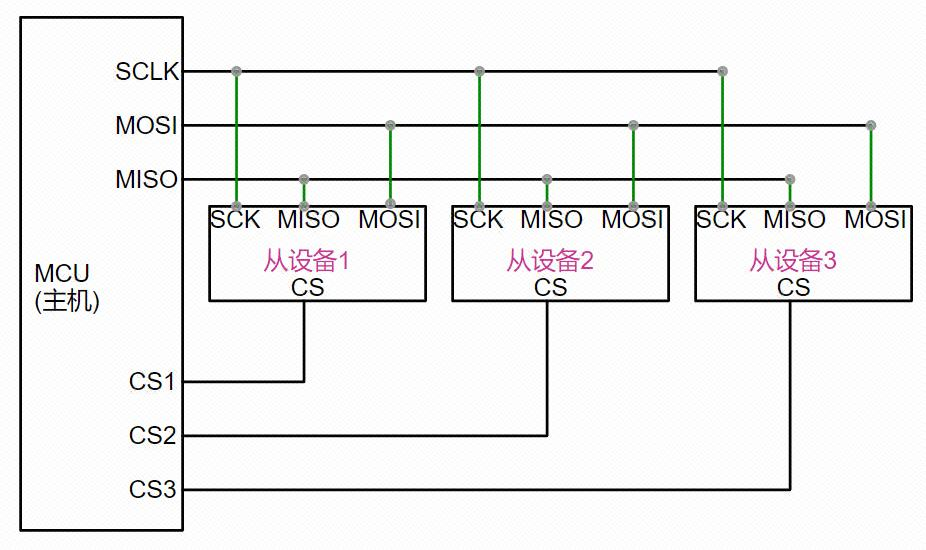
SPI主要使用4根线,时钟线(SCLK),主输出从输入线(MOSI),主输入从输出线(MISO)和片选线(CS)。
| 通信线 | 说明 |
|---|---|
| SCLK | 时钟线,也叫做SCK。由主机产生时钟信号。 |
| MOSI | 主设备输出从设备输入线,也叫做SDO。意为主机向从机发送数据。 |
| MISO | 主设备输入从设备输出线,也叫做SDI。意为主机接收从机的数据。 |
| CS | 片选线,也叫做NSS。从机使能信号,由主机控制。当我们的主机控制某个从机时,需要将从机对应的片选引脚电平拉低或者是拉高。 |
主设备是通过片选线选择要与之通信的从设备。每个从设备都有一个片选线,当片选线为低电平时,表示该从设备被选中。(也有一些设备以高电平有效,需要根据其数据手册确定)。主设备通过控制时钟线的电平来同步数据传输。时钟线的上升沿和下降沿用于控制数据的传输和采样。SPI的主从接线方式需要对应,主从机设定后身份固定。
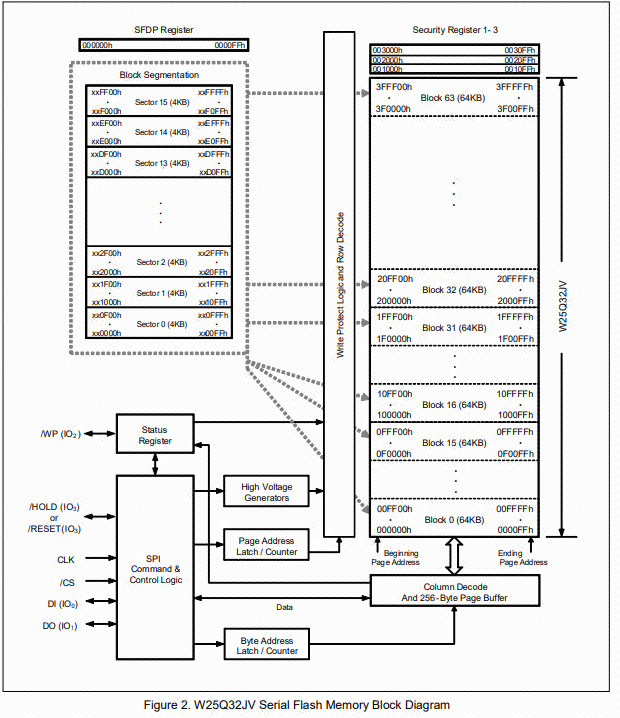
1.2 W25Q32介绍
W25Q32是一种常见的串行闪存器件,它采用SPI(Serial Peripheral Interface)接口协议,具有高速读写和擦除功能,可用于存储和读取数据。W25Q32芯片容量为32 Mbit(4 MB),其中名称后的数字代表不同的容量选项。不同的型号和容量选项可以满足不同应用的需求,比如W25Q16、W25Q64、W25Q128等。通常被用于嵌入式设备、存储设备、路由器等高性能电子设备中。 W25Q32闪存芯片的内存分配是按照扇区(Sector)和块(Block)进行的,每个扇区的大小为4KB,每个块包含16个扇区,即一个块的大小为64KB。
W25Q32存储芯片,其引脚的说明,见下表。
| CLK | 从外部获取时间,为输入输出功能提供时钟 |
|---|---|
| DI | 标准SPI使用单向的DI,来串行的写入指令,地址,或者数据到FLASH中,在时钟的上升沿。 |
| DO | 标准SPI使用单向的DO,来从处于下降边沿时钟的设备,读取数据或者状态。 |
| WP | 防止状态寄存器被写入 |
| HOLD | 当它有效时允许设备暂停,低电平:DO引脚高阻态,DI CLK引脚的信号被忽略。高电平:设备重新开始,当多个设备共享相同的SPI信 号的时候该功能可能会被用到 |
| CS | CS高电平的时候其他引脚成高阻态,处于低电平的时候,可以读写数据 |
它与开发板的连接如下:
| 开发板(主机) | W25Q32(从机) | 说明 |
|---|---|---|
| PB17 | CS(NSS) | 片选线 |
| --- | --- | --- |
| PB16 | CLK | 时钟线 |
| PB14 | DO(IO1)(MISO) | 主机输入从机输出线 |
| PB15 | DI(IO0)(MOSI) | 主机输出从机输入线 |
| GND | GND | 电源线 |
| VCC | 3V3 | 电源线 |
开发板的背面默认已经为大家贴好了该存储芯片,大家只需要了解连接的是哪一个引脚即可。
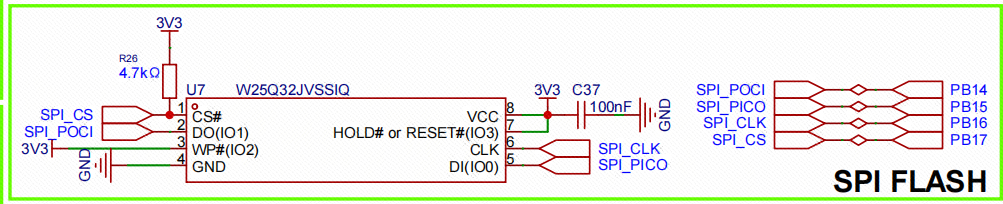
需要注意的是,我们使用的是硬件SPI方式驱动W25Q32,因此我们需要确定我们设置的引脚是否有硬件SPI外设接口。在数据手册中,PB14~PB17可以复用为SPI1的4根通信线。

这里需要注意的是PICO,表示的是外设输入控制器输出,即对应SPI中的MOSI。POCI表示外设输出控制器输入,即对应MISO。
2. 软件设计
2.1 编程大纲
-
SPI接口相关参数宏定义
-
SPI接口初始化
-
W25Q32基础函数
-
主函数测试读写
2.2 代码分析
2.2.1 SPI相关参数宏定义
/* SPI接口相关参数宏定义 */
#define SPIx SPI1
#define SPI_PICO_PORT GPIOB
#define SPI_PICO_PIN DL_GPIO_PIN_15
#define SPI_IOMUX_PICO (IOMUX_PINCM32)
#define SPI_PICO_FUNC IOMUX_PINCM32_PF_SPI1_PICO
#define SPI_POCI_PORT GPIOB
#define SPI_POCI_PIN DL_GPIO_PIN_14
#define SPI_IOMUX_POCI (IOMUX_PINCM31)
#define SPI_POCI_FUNC IOMUX_PINCM31_PF_SPI1_POCI
#define SPI_SCLK_PORT GPIOB
#define SPI_SCLK_PIN DL_GPIO_PIN_16
#define SPI_IOMUX_SCLK (IOMUX_PINCM33)
#define SPI_SCLK_FUNC IOMUX_PINCM33_PF_SPI1_SCLK
#define SPI_CS1_PORT GPIOA
#define SPI_CS1_PIN DL_GPIO_PIN_27
#define SPI_IOMUX_CS1 (IOMUX_PINCM60)
#define SPI_CS1_FUNC IOMUX_PINCM60_PF_SPI1_CS1_POCI1
#define CS_PORT GPIOB
#define CS_PIN_PIN DL_GPIO_PIN_17
#define CS_PIN_IOMUX (IOMUX_PINCM43)
/* CS控制宏定义 */
#define SPI_CS(x) ((x)?DL_GPIO_setPins(CS_PORT,CS_PIN_PIN):DL_GPIO_clearPins(CS_PORT,CS_PIN_PIN))
2.2.2 SPI接口初始化
void SPI_GPIO_init(void)
{
DL_GPIO_initPeripheralOutputFunction(SPI_IOMUX_SCLK, SPI_SCLK_FUNC);
DL_GPIO_initPeripheralOutputFunction(SPI_IOMUX_PICO, SPI_PICO_FUNC);
DL_GPIO_initPeripheralInputFunction(SPI_IOMUX_POCI, SPI_POCI_FUNC);
DL_GPIO_initPeripheralOutputFunction(SPI_IOMUX_CS1, SPI_CS1_FUNC);
DL_GPIO_initDigitalOutput(CS_PIN_IOMUX);
DL_GPIO_clearPins(CS_PORT, CS_PIN_PIN);
DL_GPIO_enableOutput(CS_PORT, CS_PIN_PIN);
}
static const DL_SPI_Config gSPI_config = {
.mode = DL_SPI_MODE_CONTROLLER, // 主机模式
.frameFormat = DL_SPI_FRAME_FORMAT_MOTO4_POL0_PHA0,// MOTO4模式
.parity = DL_SPI_PARITY_NONE, // 无校验位
.dataSize = DL_SPI_DATA_SIZE_8, // 8位数据位
.bitOrder = DL_SPI_BIT_ORDER_MSB_FIRST, // MSB 先发
.chipSelectPin = DL_SPI_CHIP_SELECT_1, // 片选引脚为 CS1
};
static const DL_SPI_ClockConfig gSPI_clockConfig = {
.clockSel = DL_SPI_CLOCK_BUSCLK, // 时钟源为总线时钟
.divideRatio = DL_SPI_CLOCK_DIVIDE_RATIO_1 // 时钟分频系数为 1
};
void SPIx_init(void)
{
DL_SPI_setClockConfig(SPIx, (DL_SPI_ClockConfig*)&gSPI_clockConfig); // 时钟配置
DL_SPI_init(SPIx, (DL_SPI_Config *) &gSPI_config); // SPI 配置
DL_SPI_setBitRateSerialClockDivider(SPIx, 0);
DL_SPI_setFIFOThreshold(SPIx, DL_SPI_RX_FIFO_LEVEL_1_2_FULL, DL_SPI_TX_FIFO_LEVEL_1_2_EMPTY);
DL_SPI_enable(SPIx);
}
void SPIx_Init(void)
{
SPI_GPIO_init();
SPIx_init();
}
2.2.3 W25Q32基本函数
2.2.3.1 通过SPI读写一个字节
uint8_t spi_read_write_byte(uint8_t dat) // SPI读写一个字节函数
{
uint8_t data = 0;
DL_SPI_transmitData8(SPIx,dat);
while(DL_SPI_isBusy(SPIx));
data = DL_SPI_receiveData8(SPIx);
while(DL_SPI_isBusy(SPIx));
return data;
}
2.2.3.2 写使能与等待空闲
void W25Q32_write_enable(void) // SPI写使能
{
SPI_CS(0);
spi_read_write_byte(0x06);
SPI_CS(1);
}
void W25Q32_wait_busy(void) // SPI等待空闲
{
unsigned char byte = 0;
do{
SPI_CS(0);
spi_read_write_byte(0x05);
byte = spi_read_write_byte(0Xff);
SPI_CS(1);
}while((byte&0x01 ) == 1);
}
2.2.3.3 读取设备ID
uint16_t W25Q32_readID(void) // SPI读取ID
{
uint16_t temp = 0;
SPI_CS(0);
W25Q32_write_enable(); // 写使能
W25Q32_wait_busy(); // 等待空闲
// 发送读取 ID 的命令
spi_read_write_byte(0x90); // 0x90 是读取设备 ID 的 SPI 命令
// 发送三个地址字节,这里用 0x00 0x00 0x00
spi_read_write_byte(0x00); // 地址字节 1
spi_read_write_byte(0x00); // 地址字节 2
spi_read_write_byte(0x00); // 地址字节 3
// 读取返回的设备 ID,前一个字节为高字节,后一个字节为低字节
temp = spi_read_write_byte(0xFF) << 8; // 读取高字节
temp |= spi_read_write_byte(0xFF); // 读取低字节
SPI_CS(1); // 释放 SPI 总线
return temp;
}
2.2.3.4 擦除扇区
void W25Q32_erase_sector(uint32_t addr) // 擦除一个扇区
{
addr *= 4096;
W25Q32_write_enable();
W25Q32_wait_busy();
SPI_CS(0);
spi_read_write_byte(0x20);
spi_read_write_byte((uint8_t)((addr)>>16));
spi_read_write_byte((uint8_t)((addr)>>8));
spi_read_write_byte((uint8_t)addr);
SPI_CS(1);
W25Q32_wait_busy();
}
2.2.3.5 读写数据
// W25Q32写入数据
void W25Q32_write(uint8_t* buffer, uint32_t addr, uint16_t numbyte)
{
unsigned int i = 0;
W25Q32_erase_sector(addr/4096);
W25Q32_write_enable();
W25Q32_wait_busy();
SPI_CS(0);
spi_read_write_byte(0x02);
spi_read_write_byte((uint8_t)((addr)>>16));
spi_read_write_byte((uint8_t)((addr)>>8));
spi_read_write_byte((uint8_t)addr);
for(i=0;i<numbyte;i++)
{
spi_read_write_byte(buffer[i]);
}
SPI_CS(0);
W25Q32_wait_busy();
}
// W25Q32读取数据
void W25Q32_read(uint8_t* buffer,uint32_t read_addr,uint16_t read_length)
{
uint16_t i;
SPI_CS(0);
spi_read_write_byte(0x03);
spi_read_write_byte((uint8_t)((read_addr)>>16));
spi_read_write_byte((uint8_t)((read_addr)>>8));
spi_read_write_byte((uint8_t)read_addr);
for(i=0;i<read_length;i++)
{
buffer[i]= spi_read_write_byte(0XFF);
}
SPI_CS(1);
}
2.2.4 主函数测试读写
#include <ti_msp_dl_config.h>
#include "SysTick.h"
#include "Uart.h"
#include "W25Q32.h"
#include <stdio.h>
int main(void)
{
SYSCFG_DL_init();
UART_0_init();
SysTick_Init();
SPIx_Init();
uint8_t buff[10] = {0};
W25Q32_read(buff, 0, 5);
printf("buff = %s\r\n",buff);
W25Q32_write((uint8_t*)"6666", 0, 5);
delay_ms(100);
W25Q32_read(buff, 0, 5);
printf("buff = %s\r\n",buff);
while (1)
{
}
}
3. 小结
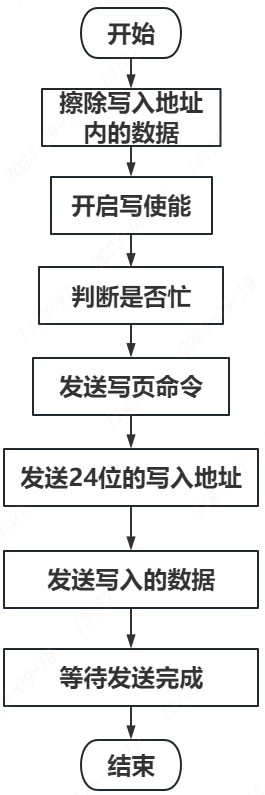
写入数据步骤如图。在FLASH存储器中,每次写入数据都要确保其中的数据为0xFF,是因为FLASH存储器的写入操作是一种擦除-写入操作。擦除操作是将存储单元中的数据全部置为1,也就是0xFF。然后,只有将要写入的数据位为0的位置才能进行写入操作,将其改变为0。这个过程是不可逆的,所以在写入数据之前,需要先确保要写入的位置为0xFF,然后再写入数据。
这种擦除-写入的操作是由于FLASH存储器的特殊结构决定的。FLASH存储器中的存储单元是通过电子门的状态进行控制的,每个门可以存储一个二进制位。擦除操作需要将门的状态恢复为初始状态,即全部为1。然后通过改变门的状态,将需要存储的数据位改变为0。所以在写入数据之前,需要确保存储单元的状态为1,以便进行正确的写入操作。
另外,FLASH存储器的擦除操作是以块为单位进行的,而不是单个存储单元。所以如果要写入数据的位置上已经有数据存在,需要进行擦除操作,将整个块的数据都置为1,然后再写入新的数据。这也是为什么在FLASH写入数据之前需要确保其中的数据为0xFF的原因。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号