第6章 NVIC-外部中断
第六章 NVIC-外部中断
1. 硬件设计
外部中断是硬件中断的一种,它由微控制器外部的事件引发。微控制器的某些引脚被设计为对特定事件的发生做出响应,例如按钮的按压、传感器的信号改变等。这些指定的引脚通常被称为“外部中断引脚”。
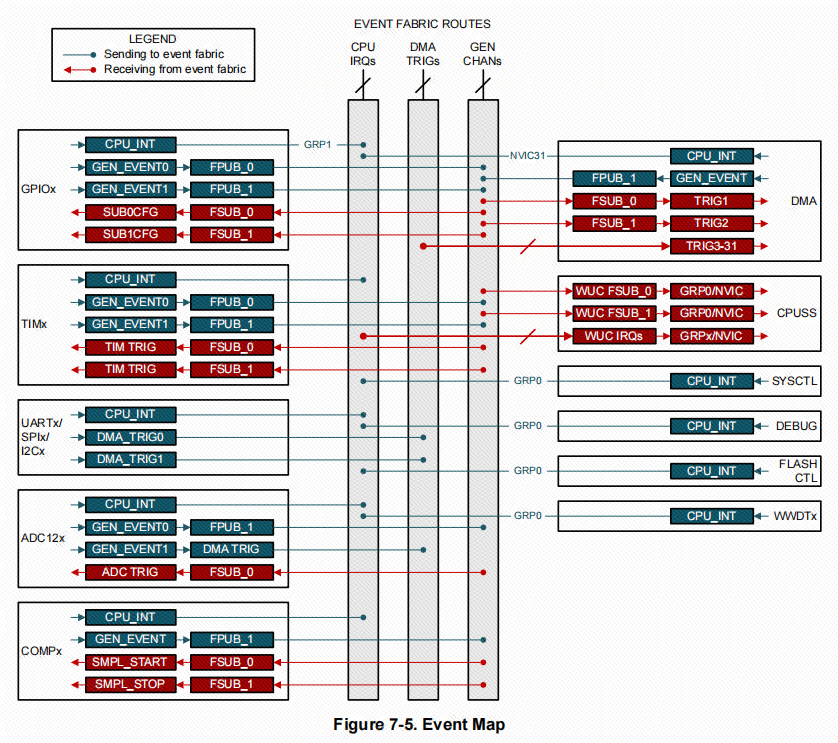
MSPM0系列把CPU中断,DMA触发,以及外设触发外设,都统称为事件(Event),触发源称为事件发布者(Event Publisher),相应中断的外设被称为事件订阅者(Event Subscriber)。
下图为MSPM0系列的事件安排表。其中绿色表示事件发布者(发送),将外设上发生的事件告诉总线;红色为事件订阅者(接收),接收总线上的事件情况。
本章与key硬件设计相同,只是在软件上有区别,上一章我们使用的读取GPIO状态,这次我们使用外部中断配置
我们配置好了引脚的中断之后,还要手动编写外部中断的中断服务函数,因为我们开启的引脚下降沿中断,当我们的按键从按下到松开的时候产生的下降沿,就会触发一次中断,触发中断就会执行中断服务函数。各个中断的中断服务函数名称已经被写死,不可修改,否则无法正常进入中断服务函数。关于中断服务函数的名称是什么,看下表:
| 中断函数名 | 中断说明 |
|---|---|
| Reset_Handler | 复位中断函数 |
| NMI_Handler | 不可屏蔽中断函数 |
| HardFault_Handler | 硬件故障中断函数 |
| SVC_Handler | 特权中断函数 |
| PendSV_Handler | 一种可挂起的、最低优先级的中断函数 |
| SysTick_Handler | 滴答定时器中断函数 |
| GROUP0_IRQHandler | GROUP0的中断函数 |
| GROUP1_IRQHandler | GROUP1中断函数 |
| TIMG8_IRQHandler | TIMG8的中断函数 |
| UART3_IRQHandler | UART3的中断函数 |
| ADC0_IRQHandler | ADC0的中断函数 |
| ADC1_IRQHandler | ADC1的中断函数 |
| CANFD0_IRQHandler | CANFD0的中断函数 |
| DAC0_IRQHandler | DAC0的中断函数 |
| SPI0_IRQHandler | SPI0的中断函数 |
| SPI1_IRQHandler | SPI1的中断函数 |
| UART1_IRQHandler | UART1的中断函数 |
| UART2_IRQHandler | UART2的中断函数 |
| UART0_IRQHandler | UART0的中断函数 |
| TIMG0_IRQHandler | TIMG0 的中断函数 |
| TIMG6_IRQHandler | TIMG6的中断函数 |
| TIMA0_IRQHandler | TIMA0的中断函数 |
| TIMA1_IRQHandler | TIMA1的中断函数 |
| TIMG7_IRQHandler | TIMG7的中断函数 |
| TIMG12_IRQHandler | TIMG12的中断函数 |
| I2C0_IRQHandler | I2C0的中断函数 |
| I2C1_IRQHandler | I2C1的中断函数 |
| AES_IRQHandler | 硬件加速器的中断函数 |
| RTC_IRQHandler | RTC实时时钟的中断函数 |
| DMA_IRQHandler | DMA的中断函数 |
2. 软件设计
2.1 编程大纲
-
中断配置宏定义
-
中断配置
-
中断服务函数
-
主函数测试
2.2 代码分析
2.2.1 中断配置宏定义
#ifndef __KEY_H
#define __KEY_H
#include "ti_msp_dl_config.h"
#define KEY_PORT GPIOA
#define KEY_PIN DL_GPIO_PIN_18
#define KEY_IOMUX IOMUX_PINCM40
/* 中断相关配置 */
#define KEY_IRQN (GPIOA_INT_IRQn) // 选择中断源
#define KEY_INT_IIDX (DL_INTERRUPT_GROUP1_IIDX_GPIOA) // 选择中断组
#define KEY_IIDX (DL_GPIO_IIDX_DIO18) // 选择中断引脚
void KEY_Init(void);
#endif
2.2.2 中断配置
#include "Key.h"
void KEY_Init(void)
{
uint32_t pincmIndex = KEY_IOMUX; // 目标引脚
DL_GPIO_INVERSION inversion = DL_GPIO_INVERSION_DISABLE; // 设置为不反转输入
DL_GPIO_RESISTOR internalResistor = DL_GPIO_RESISTOR_PULL_DOWN; // 设置为下拉电阻
DL_GPIO_HYSTERESIS hysteresis = DL_GPIO_HYSTERESIS_DISABLE; // 禁用滞后
DL_GPIO_WAKEUP wakeup = DL_GPIO_WAKEUP_DISABLE; // 禁用唤醒功能
DL_GPIO_initDigitalInputFeatures(pincmIndex, inversion, internalResistor, hysteresis, wakeup); // 初始化IO功能
/* 中断相关配置 */
DL_GPIO_setUpperPinsPolarity(KEY_PORT, DL_GPIO_PIN_18_EDGE_RISE_FALL); // 设置中断引脚的上升沿和下降沿触发中断
DL_GPIO_clearInterruptStatus(KEY_PORT, KEY_PIN); // 清除中断标志位
NVIC_SetPriority(KEY_IRQN, 2); // 设置中断优先级
DL_GPIO_enableInterrupt(KEY_PORT, KEY_PIN); // 使能中断
}
2.2.3 中断服务函数
// Group1的中断服务函数
void GROUP1_IRQHandler(void)
{
// 读取KEY_IRQN中断的状态
switch(DL_Interrupt_getPendingGroup(DL_INTERRUPT_GROUP_1))
{
case KEY_INT_IIDX:
if(DL_GPIO_readPins(KEY_PORT, KEY_PIN) > 0)
{
DL_GPIO_togglePins(LED_PORT, LED_PIN);
}
break;
}
}
2.2.4 主函数测试
int main(void)
{
SYSCFG_DL_init();
LED_Init();
KEY_Init();
NVIC_EnableIRQ(KEY_IRQN); // 使能KEY_IRQN中断
while(1)
{
}
}
3. 小结
3.1 中断处理流程
- 中断使能:每个中断源都可以通过设置相应的使能位来启用或禁用。
- 中断触发:每个中断源都具有触发条件(如边沿触发或电平触发)。
- 中断响应:当中断触发时,处理器会中断当前任务,保存当前上下文并跳转到中断服务程序(ISR)。
- 中断嵌套:MSPM0G3507 支持嵌套中断,这意味着高优先级的中断可以打断低优先级的中断。
3.2 中断配置
- NVIC 配置:通过 NVIC 寄存器配置中断源、优先级和使能。
- 外设中断配置:外部设备(如 GPIO、定时器、串口等)通过外设控制寄存器配置其中断使能、触发模式等。
- 中断向量表:每个中断源在中断向量表中都有一个对应的地址,程序通过该地址跳转到相应的中断服务例程。
#include "msp.h"
void GPIOA_Handler(void) {
if (GPIOA->RIS & 0x01) { // 检查 PA0 中断标志
GPIOA->ICR |= 0x01; // 清除中断标志
// 执行相关操作,如切换 LED 状态等
}
}
void TIMER0A_Handler(void) {
if (TIMER0->RIS & 0x01) { // 检查定时器中断标志
TIMER0->ICR |= 0x01; // 清除中断标志
// 执行定时任务,如切换 LED 状态等
}
}
int main(void) {
// 配置 GPIOA 引脚为输入并使能中断
SYSCTL->RCGCGPIO |= SYSCTL_RCGCGPIO_R0;
GPIOA->DIR &= ~0x01;
GPIOA->IS &= ~0x01;
GPIOA->IBE &= ~0x01;
GPIOA->IEV |= 0x01;
GPIOA->IM |= 0x01;
NVIC_EnableIRQ(GPIOA_IRQn);
NVIC_SetPriority(GPIOA_IRQn, 2);
// 配置定时器0
SYSCTL->RCGCTIMER |= SYSCTL_RCGCTIMER_R0;
TIMER0->CTL = 0;
TIMER0->CFG = 0x04;
TIMER0->TAMR = 0x02;
TIMER0->TAILR = 50000000 - 1;
TIMER0->IMR = 0x01;
NVIC_EnableIRQ(TIMER0A_IRQn);
NVIC_SetPriority(TIMER0A_IRQn, 1);
// 启动定时器
TIMER0->CTL |= 0x01;
while (1) {
// 主循环,等待中断
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号