
第27章 CAN通讯实验
第二十七章 CAN通讯实验
1. 硬件设计
本章要用到的硬件资源如下:
- 指示灯DS0
- KEY0和KEY_UP按键
- TFTLCD模块
- CAN
- CAN收发芯片JTA1050
前面 3 个之前都已经详细介绍过了,这里我们介绍 STM32F4 与 TJA1050 连接关系,如图:
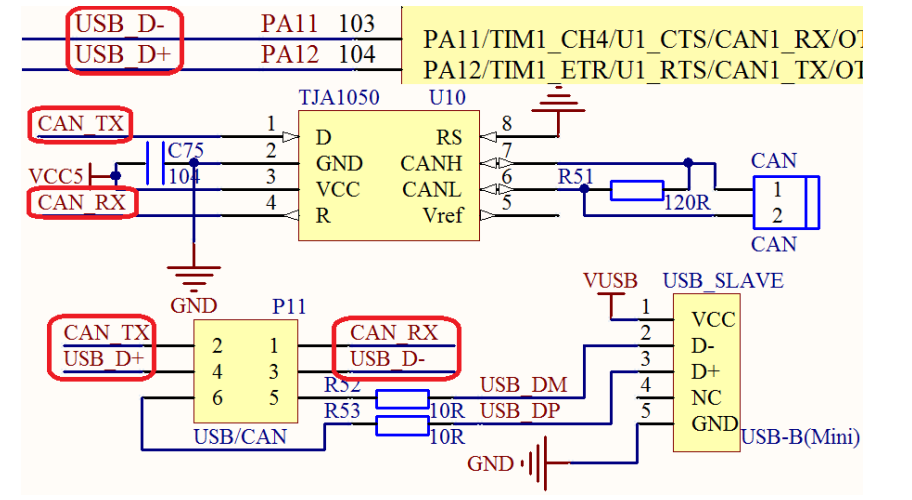
从上图可以看出: STM32F4 的 CAN 通过 P11 的设置,连接到 TJA1050 收发芯片,然后通过接线端子(CAN)同外部的 CAN 总线连接。图中可以看出,在探索者 STM32F4 开发板上面是带有 120Ω的终端电阻的,如果我们的开发板不是作为 CAN 的终端的话,需要把这个电阻去掉,以免影响通信。另外,需要注意: CAN1 和 USB 共用了 PA11 和 PA12,所以他们不能同时使用。
这里还要注意,我们要设置好开发板上 P11 排针的连接,通过跳线帽将 PA11 和 PA12 分别连接到 CRX(CAN_RX)和 CTX(CAN_TX)上面,如图:
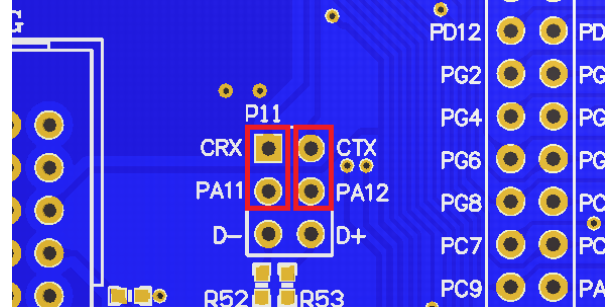
最后,我们用 2 根导线将两个开发板 CAN 端子的 CAN_L 和 CAN_L, CAN_H 和 CAN_H连接起来。
2. 软件设计
2.1 CAN初始化
CAN_HandleTypeDef CAN1_Handler; // CAN1句柄
CAN_TxHeaderTypeDef TxHeader; // 发送
CAN_RxHeaderTypeDef RxHeader; // 接收
// CAN初始化
// tsjw:重新同步跳跃时间单元.范围:CAN_SJW_1TQ~CAN_SJW_4TQ
// tbs2:时间段2的时间单元. 范围:CAN_BS2_1TQ~CAN_BS2_8TQ;
// tbs1:时间段1的时间单元. 范围:CAN_BS1_1TQ~CAN_BS1_16TQ
// brp :波特率分频器.范围:1~1024; tq=(brp)*tpclk1
// 波特率=Fpclk1/((tbs1+tbs2+1)*brp); 其中tbs1和tbs2我们只用关注标识符上标志的序号,例如CAN_BS2_1TQ,我们就认为tbs2=1来计算即可。
// mode:CAN_MODE_NORMAL,普通模式;CAN_MODE_LOOPBACK,回环模式;
// Fpclk1的时钟在初始化的时候设置为42M,如果设置CAN1_Mode_Init(CAN_SJW_1tq,CAN_BS2_6tq,CAN_BS1_7tq,6,CAN_MODE_LOOPBACK);
// 则波特率为:42M/((6+7+1)*6)=500Kbps
// 返回值:0,初始化OK;
// 其他,初始化失败;
u8 CAN1_Mode_Init(u32 tsjw,u32 tbs2,u32 tbs1,u16 brp,u32 mode)
{
CAN_InitTypeDef CAN1_InitConf; // CAN1初始化配置结构体
CAN1_Handler.Instance = CAN1; // CAN1设备句柄
CAN1_Handler.Init = CAN1_InitConf;// CAN1初始化配置结构体
CAN1_Handler.Init.Prescaler=brp; // 分频系数(Fdiv)为brp+1
CAN1_Handler.Init.Mode=mode; // 模式设置
CAN1_Handler.Init.SyncJumpWidth=tsjw;// 重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1TQ~CAN_SJW_4TQ
CAN1_Handler.Init.TimeSeg1=tbs1; // tbs1范围CAN_BS1_1TQ~CAN_BS1_16TQ
CAN1_Handler.Init.TimeSeg2=tbs2; // tbs2范围CAN_BS2_1TQ~CAN_BS2_8TQ
CAN1_Handler.Init.TimeTriggeredMode=DISABLE;// 非时间触发通信模式
CAN1_Handler.Init.AutoBusOff=DISABLE; // 软件自动离线管理
CAN1_Handler.Init.AutoWakeUp=DISABLE; // 睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)
CAN1_Handler.Init.AutoRetransmission=ENABLE;// 禁止报文自动传送
CAN1_Handler.Init.ReceiveFifoLocked=DISABLE;// 报文不锁定,新的覆盖旧的
CAN1_Handler.Init.TransmitFifoPriority=DISABLE;// 优先级由报文标识符决定
if(HAL_CAN_Init(&CAN1_Handler)!=HAL_OK) // 初始化
return 1;
return 0;
}
2.2 CAN GPIO配置
// CAN底层驱动,引脚配置,时钟配置,中断配置
// 此函数会被HAL_CAN_Init()调用
// hcan:CAN句柄
void HAL_CAN_MspInit(CAN_HandleTypeDef* hcan)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_CAN1_CLK_ENABLE(); // 使能CAN1时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); // 开启GPIOA时钟
GPIO_Initure.Pin=GPIO_PIN_11|GPIO_PIN_12;// PA11,12
GPIO_Initure.Mode=GPIO_MODE_AF_PP; // 推挽复用
GPIO_Initure.Pull=GPIO_PULLUP; // 上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; // 快速
GPIO_Initure.Alternate=GPIO_AF9_CAN1; // 复用为CAN1
HAL_GPIO_Init(GPIOA,&GPIO_Initure); // 初始化
}
2.3 CAN配置函数
// CAN配置函数
void CAN_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
/*##-2- Configure the CAN Filter ###########################################*/
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&CAN1_Handler, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
while(1)
{
}
}
/*##-3- Start the CAN peripheral ###########################################*/
if (HAL_CAN_Start(&CAN1_Handler) != HAL_OK)
{
/* Start Error */
while(1)
{
}
}
/*##-4- Activate CAN RX notification #######################################*/
if (HAL_CAN_ActivateNotification(&CAN1_Handler, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)
{
/* Notification Error */
while(1)
{
}
}
/*##-5- Configure Transmission process #####################################*/
TxHeader.StdId = 0x321;
TxHeader.ExtId = 0x01;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 2;
TxHeader.TransmitGlobalTime = DISABLE;
}
2.4 CAN发送数据函数
// can发送一组数据(固定格式:ID为0X12,标准帧,数据帧)
// len:数据长度(最大为8)
// msg:数据指针,最大为8个字节.
// 返回值:0,成功;
// 其他,失败;
u8 CAN1_Send_Msg(u8* msg,u8 len)
{
u8 i=0;
u32 TxMailbox;
u8 message[8];
TxHeader.StdId = 0X12; // 标准标识符
TxHeader.ExtId = 0x12; // 扩展标识符(29位)
TxHeader.IDE = CAN_ID_STD; // 使用标准帧
TxHeader.RTR = CAN_RTR_DATA; // 数据帧
TxHeader.DLC = len; // 数据长度
for(i=0;i<len;i++)
{
message[i]=msg[i];
}
if(HAL_CAN_AddTxMessage(&CAN1_Handler, &TxHeader, message, &TxMailbox) != HAL_OK)//发送
{
return 1;
}
while(HAL_CAN_GetTxMailboxesFreeLevel(&CAN1_Handler) != 3) {}
return 0;
}
2.5 CAN接收数据查询
// can口接收数据查询
// buf:数据缓存区;
// 返回值:0,无数据被收到;
// 其他,接收的数据长度;
u8 CAN1_Receive_Msg(u8 *buf)
{
u32 i;
u8 RxData[8];
if(HAL_CAN_GetRxFifoFillLevel(&CAN1_Handler, CAN_RX_FIFO0) != 1)
{
return 0xF1;
}
if(HAL_CAN_GetRxMessage(&CAN1_Handler, CAN_RX_FIFO0, &RxHeader, RxData) != HAL_OK)
{
return 0xF2;
}
for(i=0;i<RxHeader.DLC;i++)
buf[i]=RxData[i];
return RxHeader.DLC;
}
2.6 主函数
int main(void)
{
u8 key;
u8 i=0,t=0;
u8 cnt=0;
u8 canbuf[8];
u8 res;
u8 mode=1;
HAL_Init(); // 初始化HAL库
Stm32_Clock_Init(336,8,2,7);// 设置时钟,168Mhz
delay_init(168); // 初始化延时函数
uart_init(115200); // 初始化USART
usmart_dev.init(84); // 初始化USMART
LED_Init(); // 初始化LED
KEY_Init(); // 初始化KEY
LCD_Init(); // 初始化LCD
CAN1_Mode_Init(CAN_SJW_1TQ,CAN_BS2_6TQ,CAN_BS1_7TQ,6,CAN_MODE_LOOPBACK); // CAN初始化,波特率500Kbps
CAN_Config(); // 配置CAN1
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Explorer STM32F4");
LCD_ShowString(30,70,200,16,16,"CAN TEST");
LCD_ShowString(30,130,200,16,16,"LoopBack Mode");
LCD_ShowString(30,150,200,16,16,"KEY0:Send WK_UP:Mode");//显示提示信息
POINT_COLOR=BLUE;//设置字体为蓝色
LCD_ShowString(30,170,200,16,16,"Count:"); // 显示当前计数值
LCD_ShowString(30,190,200,16,16,"Send Data:"); // 提示发送的数据
LCD_ShowString(30,250,200,16,16,"Receive Data:");// 提示接收到的数据
while(1)
{
key=KEY_Scan(0);
if(key==KEY0_PRES)//KEY0按下,发送一次数据
{
for(i=0;i<8;i++)
{
canbuf[i]=cnt+i;//填充发送缓冲区
if(i<4)LCD_ShowxNum(30+i*32,210,canbuf[i],3,16,0X80); //显示数据
else LCD_ShowxNum(30+(i-4)*32,230,canbuf[i],3,16,0X80); //显示数据
}
res=CAN1_Send_Msg(canbuf,8);// 发送8个字节
if(res)LCD_ShowString(30+80,190,200,16,16,"Failed"); //提示发送失败
else LCD_ShowString(30+80,190,200,16,16,"OK "); //提示发送成功
}else if(key==WKUP_PRES)//WK_UP按下,改变CAN的工作模式
{
mode=!mode;
if(mode==0) CAN1_Mode_Init(CAN_SJW_1TQ,CAN_BS2_6TQ,CAN_BS1_7TQ,6,CAN_MODE_NORMAL); //回环模式,波特率500Kbps
else if(mode==1) CAN1_Mode_Init(CAN_SJW_1TQ,CAN_BS2_6TQ,CAN_BS1_7TQ,6,CAN_MODE_LOOPBACK); //回环模式,波特率500Kbps
CAN_Config();
POINT_COLOR=RED;//设置字体为红色
if(mode==0)//普通模式,需要2个开发板
{
LCD_ShowString(30,130,200,16,16,"Nnormal Mode ");
}else //回环模式,一个开发板就可以测试了.
{
LCD_ShowString(30,130,200,16,16,"LoopBack Mode");
}
POINT_COLOR=BLUE;//设置字体为蓝色
}
key=CAN1_Receive_Msg(canbuf);
if(key < 9)//接收到有数据
{
LCD_Fill(30,270,160,310,WHITE);//清除之前的显示
for(i=0;i<key;i++)
{
if(i<4)LCD_ShowxNum(30+i*32,270,canbuf[i],3,16,0X80); //显示数据
else LCD_ShowxNum(30+(i-4)*32,290,canbuf[i],3,16,0X80); //显示数据
}
}
t++;
delay_ms(10);
if(t==20)
{
LED0=!LED0;//提示系统正在运行
t=0;
cnt++;
LCD_ShowxNum(30+48,170,cnt,3,16,0X80); //显示数据
}
}
}
3. 小结
实验目的
- 理解CAN总线通信原理。
- 实现CAN数据的发送与接收。
- 使用LCD模块显示接收到的数据。
硬件连接
- CAN接口连接:
- STM32F4开发板的CAN_TX连接到MCP2551的TXD引脚。
- STM32F4开发板的CAN_RX连接到MCP2551的RXD引脚。
- MCP2551的VCC和GND连接至开发板的电源和接地。
- LCD模块连接:
- 按照LCD模块的引脚说明连接到STM32F4的GPIO引脚。
- 按键连接:
- KEY_UP连接到某个GPIO引脚(例如PA0)。
- KEY0连接到另一个GPIO引脚(例如PA1)。
实验步骤
1. 项目初始化
使用STM32CubeMX配置项目:
- 启用CAN模块(如CAN1)。
- 配置波特率为500 kbps。
- 配置GPIO引脚(TX、RX和LCD控制引脚)。
2. 编写CAN初始化代码
CAN_HandleTypeDef hcan1;
void MX_CAN1_Init(void) {
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 16;
hcan1.Init.Mode = CAN_MODE_NORMAL; // 初始模式
hcan1.Init.SJW = CAN_SJW_1TQ;
hcan1.Init.BS1 = CAN_BS1_8TQ;
hcan1.Init.BS2 = CAN_BS2_3TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
HAL_CAN_Init(&hcan1);
}
3. 按键处理
- 使用外部中断处理按键输入。
- KEY_UP用于切换工作模式(环回或正常模式)。
- KEY0用于发送数据。
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if (GPIO_Pin == KEY_UP_PIN) {
// 切换工作模式
if (hcan1.Init.Mode == CAN_MODE_NORMAL) {
hcan1.Init.Mode = CAN_MODE_LOOPBACK;
} else {
hcan1.Init.Mode = CAN_MODE_NORMAL;
}
HAL_CAN_Init(&hcan1); // 重新初始化
} else if (GPIO_Pin == KEY0_PIN) {
// 发送数据
uint8_t data[] = "Hello CAN!";
CAN_TxHeaderTypeDef txHeader;
txHeader.StdId = 0x321;
txHeader.ExtId = 0x01;
txHeader.RTR = CAN_RTR_DATA;
txHeader.DLC = sizeof(data);
HAL_CAN_AddTxMessage(&hcan1, &txHeader, data, &txMailbox);
}
}
4. 接收数据
设置CAN接收功能,并在LCD上显示接收到的数据。
void CAN_Receive(void) {
CAN_RxHeaderTypeDef rxHeader;
uint8_t rxData[8];
if (HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &rxHeader, rxData) == HAL_OK) {
// 将接收到的数据通过LCD显示
LCD_Display(rxData, rxHeader.DLC);
}
}
5. LCD显示函数
实现一个函数,用于在LCD上显示接收到的数据。
void LCD_Display(uint8_t* data, uint8_t length) {
LCD_Clear(); // 清空LCD
for (int i = 0; i < length; i++) {
LCD_SendData(data[i]); // 发送数据到LCD
}
}
6. 主函数
在主函数中初始化系统和CAN,并进入主循环。
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_CAN1_Init();
LCD_Init();
while (1) {
CAN_Receive(); // 接收数据
HAL_Delay(100); // 延迟
}
}
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18494437
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步