第25章 SPI实验
第二十五章 SPI实验
1. 硬件设计
本章实验功能简介:开机的时候先检测 W25Q128 是否存在,然后在主循环里面检测两个按键,其中 1 个按键(KEY1) 用来执行写入 W25Q128 的操作,另外一个按键(KEY0) 用来执行读出操作,在 TFTLCD 模块上显示相关信息。同时用 DS0 提示程序正在运行。
所要用到的硬件资源如下:
-
指示灯 DS0
-
KEY_UP 和 KEY1 按键
-
TFTLCD 模块
-
SPI
-
W25Q128
板上的 W25Q128 是直接连在 STM32F4 的 SPI1上的,连接关系如图所示:
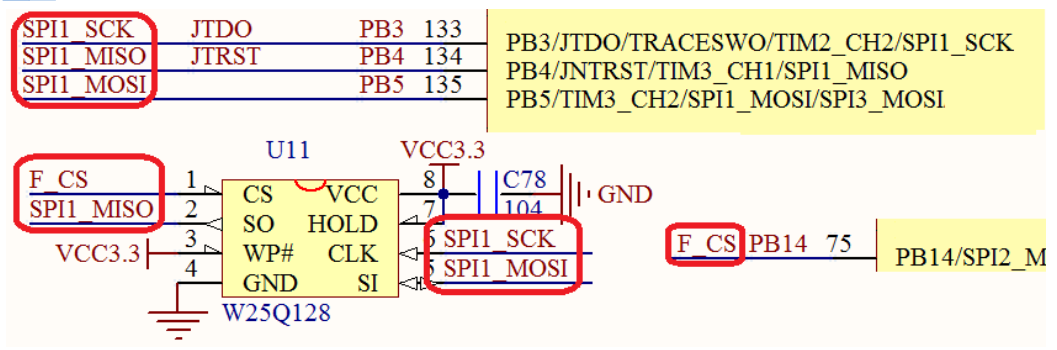
这里,我们的 F_CS 是连接在 PB14 上面的,另外要特别注意: W25Q128 和 NRF24L01 共用 SPI1,所以这两个器件在使用的时候,必须分时复用(通过片选控制)才行。
2. 软件设计
2.1 SPI初始化
SPI_HandleTypeDef SPI1_Handler; //SPI1句柄
// 以下是SPI模块的初始化代码,配置成主机模式
// SPI口初始化
// 这里针是对SPI1的初始化
void SPI1_Init(void)
{
SPI1_Handler.Instance=SPI1; // SPI1
SPI1_Handler.Init.Mode=SPI_MODE_MASTER; // 设置SPI工作模式,设置为主模式
SPI1_Handler.Init.Direction=SPI_DIRECTION_2LINES; // 设置SPI单向或者双向的数据模式:SPI设置为双线模式
SPI1_Handler.Init.DataSize=SPI_DATASIZE_8BIT; // 设置SPI的数据大小:SPI发送接收8位帧结构
SPI1_Handler.Init.CLKPolarity=SPI_POLARITY_HIGH; // 串行同步时钟的空闲状态为高电平
SPI1_Handler.Init.CLKPhase=SPI_PHASE_2EDGE; // 串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI1_Handler.Init.NSS=SPI_NSS_SOFT; // NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI1_Handler.Init.BaudRatePrescaler=SPI_BAUDRATEPRESCALER_256;//定义波特率预分频的值:波特率预分频值为256
SPI1_Handler.Init.FirstBit=SPI_FIRSTBIT_MSB; // 指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI1_Handler.Init.TIMode=SPI_TIMODE_DISABLE; // 关闭TI模式
SPI1_Handler.Init.CRCCalculation=SPI_CRCCALCULATION_DISABLE;// 关闭硬件CRC校验
SPI1_Handler.Init.CRCPolynomial=7; //CRC值计算的多项式
HAL_SPI_Init(&SPI1_Handler); // 初始化SPI
__HAL_SPI_ENABLE(&SPI1_Handler); // 使能SPI1
SPI1_ReadWriteByte(0Xff); // 启动传输
}
2.2 SPI GPIO配置
// SPI5底层驱动,时钟使能,引脚配置
// 此函数会被HAL_SPI_Init()调用
// hspi:SPI句柄
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE(); // 使能GPIOB时钟
__HAL_RCC_SPI1_CLK_ENABLE(); // 使能SPI1时钟
// PB3,4,5
GPIO_Initure.Pin=GPIO_PIN_3|GPIO_PIN_4|GPIO_PIN_5;
GPIO_Initure.Mode=GPIO_MODE_AF_PP; // 复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; // 上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; // 快速
GPIO_Initure.Alternate=GPIO_AF5_SPI1; // 复用为SPI1
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
}
2.3 SPI速度设置函数
// SPI速度设置函数
// SPI速度=fAPB1/分频系数
// 函数参数:SPI_BaudRate_Prescaler:SPI_BAUDRATEPRESCALER_2~SPI_BAUDRATEPRESCALER_2 256
// fAPB1时钟一般为42Mhz:
void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
__HAL_SPI_DISABLE(&SPI1_Handler); // 关闭SPI
SPI1_Handler.Instance->CR1&=0XFFC7; // 位3-5清零,用来设置波特率
SPI1_Handler.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度
__HAL_SPI_ENABLE(&SPI1_Handler); // 使能SPI
}
2.4 SPI读写一个字节
// SPI1 读写一个字节
// TxData:要写入的字节
// 返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
u8 Rxdata;
HAL_SPI_TransmitReceive(&SPI1_Handler,&TxData,&Rxdata,1, 1000); // 函数参数:SPI句柄,发送数据,接收数据,数据长度,超时时间
return Rxdata; // 返回收到的数据
}
2.5 初始化W25Q256
//4Kbytes为一个Sector
//16个扇区为1个Block
//W25Q256
//容量为32M字节,共有512个Block,8192个Sector
//初始化SPI FLASH的IO口
void W25QXX_Init(void)
{
u8 temp;
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
//PB14
GPIO_Initure.Pin=GPIO_PIN_14; // PB14
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; // 上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; // 快速
HAL_GPIO_Init(GPIOB,&GPIO_Initure); // 初始化
W25QXX_CS=1; // SPI FLASH不选中
SPI1_Init(); // 初始化SPI
SPI1_SetSpeed(SPI_BAUDRATEPRESCALER_2); // 设置为42M时钟,高速模式
W25QXX_TYPE=W25QXX_ReadID(); // 读取FLASH ID.
if(W25QXX_TYPE==W25Q256) // SPI FLASH为W25Q256
{
temp=W25QXX_ReadSR(3); // 读取状态寄存器3,判断地址模式
if((temp&0X01)==0) // 如果不是4字节地址模式,则进入4字节地址模式
{
W25QXX_CS=0; // 选中
SPI1_ReadWriteByte(W25X_Enable4ByteAddr); // 发送进入4字节地址模式指令
W25QXX_CS=1; // 取消片选
}
}
}
2.6 主函数
// 要写入到W25QXX的字符串数组
const u8 TEXT_Buffer[]={"Explorer STM32F4 SPI TEST"};
#define SIZE sizeof(TEXT_Buffer)
int main(void)
{
u8 key;
u16 i=0;
u8 datatemp[SIZE];
u32 FLASH_SIZE;
HAL_Init(); // 初始化HAL库
Stm32_Clock_Init(336,8,2,7); // 设置时钟,168Mhz
delay_init(168); // 初始化延时函数
uart_init(115200); // 初始化USART
usmart_dev.init(84); // 初始化USMART
LED_Init(); // 初始化LED
KEY_Init(); // 初始化KEY
LCD_Init(); // 初始化LCD
W25QXX_Init(); // W25QXX初始化
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Explorer STM32F4");
LCD_ShowString(30,70,200,16,16,"SPI TEST");
LCD_ShowString(30,130,200,16,16,"KEY1:Write KEY0:Read"); //显示提示信息
// while(W25QXX_ReadID()!=W25Q128) //检测不到W25Q256
while(W25QXX_ReadID()!=W25Q128 && W25QXX_ReadID()!=NM25Q128 && W25QXX_ReadID()!=BY25Q128) /* 读取QSPI FLASH ID */
{
LCD_ShowString(30,150,200,16,16,"W25Q128 Check Failed!");
delay_ms(500);
LCD_ShowString(30,150,200,16,16,"Please Check! ");
delay_ms(500);
LED0=!LED0; //DS0闪烁
}
LCD_ShowString(30,150,200,16,16,"W25Q128 Ready!");
FLASH_SIZE=32*1024*1024; //FLASH 大小为32M字节
POINT_COLOR=BLUE; //设置字体为蓝色
while(1)
{
key=KEY_Scan(0);
if(key==KEY1_PRES)//KEY1按下,写入W25Q128
{
LCD_Fill(0,170,239,319,WHITE);//清除半屏
LCD_ShowString(30,170,200,16,16,"Start Write W25Q128....");
W25QXX_Write((u8*)TEXT_Buffer,FLASH_SIZE-100,SIZE); //从倒数第100个地址处开始,写入SIZE长度的数据
LCD_ShowString(30,170,200,16,16,"W25Q256 Write Finished!"); //提示传送完成
}
if(key==KEY0_PRES)//KEY0按下,读取字符串并显示
{
LCD_ShowString(30,170,200,16,16,"Start Read W25Q128.... ");
W25QXX_Read(datatemp,FLASH_SIZE-100,SIZE); //从倒数第100个地址处开始,读出SIZE个字节
LCD_ShowString(30,170,200,16,16,"The Data Readed Is: "); //提示传送完成
LCD_ShowString(30,190,200,16,16,datatemp); //显示读到的字符串
}
i++;
delay_ms(10);
if(i==20)
{
LED0=!LED0;//提示系统正在运行
i=0;
}
}
}
3. 小结
实验目标
通过 STM32 微控制器使用 SPI 接口与 W25Q256 进行数据的读写操作。这个实验将涵盖初始化 SPI 接口、发送命令、读取和写入数据的步骤。
硬件连接
| W25Q256 引脚 | STM32 引脚 |
|---|---|
| VCC | 3.3V |
| GND | GND |
| SCK | SPI SCK (如 PB13) |
| MOSI | SPI MOSI (如 PB15) |
| MISO | SPI MISO (如 PB14) |
| CS | SPI CS (如 PB12) |
软件设计
SPI 初始化
#include "main.h"
SPI_HandleTypeDef hspi1; // SPI 句柄
void MX_SPI1_Init(void) {
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER; // 主模式
hspi1.Init.Direction = SPI_DIRECTION_2LINES; // 双线模式
hspi1.Init.DataSize = SPI_DATASIZE_8BIT; // 数据大小 8 位
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW; // 时钟极性
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE; // 时钟相位
hspi1.Init.NSS = SPI_NSS_SOFT; // 软件 NSS 管理
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32; // 预分频因子
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB; // MSB 优先
hspi1.Init.TIMode = SPI_TIMODE_DISABLE; // 禁用 TI 模式
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; // 禁用 CRC 计算
hspi1.Init.CRCPolynomial = 10; // CRC 多项式
HAL_SPI_Init(&hspi1); // 初始化 SPI
}
W25Q256 操作命令
W25Q256 的常用操作命令如下:
| 操作 | 命令字 |
|---|---|
| 写入使能 | 0x06 |
| 写入禁用 | 0x04 |
| 页面编程 | 0x02 |
| 读取数据 | 0x03 |
| 按块擦除 | 0xD8 |
| 读取状态寄存器 | 0x05 |
| 读取设备 ID | 0x9F |
读写数据的函数
#include "main.h"
#define W25Q256_CS_LOW() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET)
#define W25Q256_CS_HIGH() HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET)
// SPI 发送数据
void W25Q256_Write_Enable(void) {
W25Q256_CS_LOW();
uint8_t cmd = 0x06; // 写入使能命令
HAL_SPI_Transmit(&hspi1, &cmd, 1, HAL_MAX_DELAY);
W25Q256_CS_HIGH();
}
void W25Q256_Write(uint32_t address, uint8_t* data, uint16_t length) {
W25Q256_Write_Enable();
W25Q256_CS_LOW();
uint8_t cmd[4];
cmd[0] = 0x02; // 页面编程命令
cmd[1] = (address >> 16) & 0xFF; // 地址高字节
cmd[2] = (address >> 8) & 0xFF; // 地址中字节
cmd[3] = address & 0xFF; // 地址低字节
HAL_SPI_Transmit(&hspi1, cmd, 4, HAL_MAX_DELAY); // 发送命令和地址
HAL_SPI_Transmit(&hspi1, data, length, HAL_MAX_DELAY); // 发送数据
W25Q256_CS_HIGH();
}
// 读取数据
void W25Q256_Read(uint32_t address, uint8_t* buffer, uint16_t length) {
W25Q256_CS_LOW();
uint8_t cmd[4];
cmd[0] = 0x03; // 读取命令
cmd[1] = (address >> 16) & 0xFF; // 地址高字节
cmd[2] = (address >> 8) & 0xFF; // 地址中字节
cmd[3] = address & 0xFF; // 地址低字节
HAL_SPI_Transmit(&hspi1, cmd, 4, HAL_MAX_DELAY); // 发送命令和地址
HAL_SPI_Receive(&hspi1, buffer, length, HAL_MAX_DELAY); // 读取数据
W25Q256_CS_HIGH();
}
主函数示例
int main(void) {
HAL_Init(); // 初始化 HAL 库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化 GPIO
MX_SPI1_Init(); // 初始化 SPI
uint8_t write_data[256] = {0}; // 要写入的数据
uint8_t read_data[256] = {0}; // 用于接收读取的数据
// 示例数据填充
for (int i = 0; i < 256; i++) {
write_data[i] = i; // 填充 0 到 255
}
// 写入数据
W25Q256_Write(0x000000, write_data, sizeof(write_data));
// 读取数据
W25Q256_Read(0x000000, read_data, sizeof(read_data));
// 在这里可以添加代码来处理 read_data 数据
while (1) {
// 主循环
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号