第24章 I2C实验
第二十四章 I2C实验
1. 硬件设计
本章需要用到的硬件资源有:
-
指示灯DS0
-
KEY_UP和KEY1按键
-
串口
-
TFTFLCD模块
-
24c02
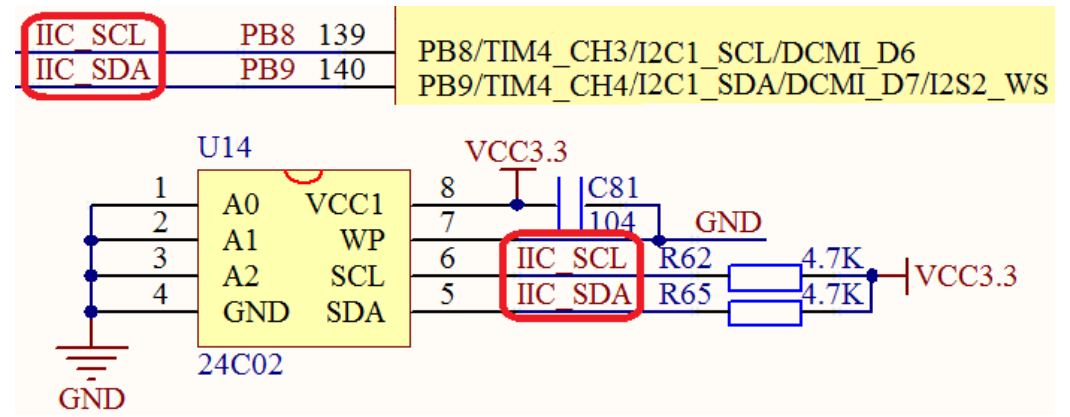
前面 4 部分的资源,我们前面已经介绍了,请大家参考相关章节。这里只介绍 24C02 与STM32F4 的连接, 24C02 的 SCL 和 SDA 分别连在 STM32F4 的 PB8 和 PB9 上的,连接关系如图所示:
2. 软件设计
2.1 I2C初始化
//IIC初始化
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
// PH4,5初始化设置
GPIO_Initure.Pin=GPIO_PIN_8|GPIO_PIN_9;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; // 上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; // 快速
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
IIC_SDA = 1; // SDA输出高
IIC_SCL = 1; // SCL输出高
}
2.2 软件模拟I2C宏定义
#ifndef _MYIIC_H
#define _MYIIC_H
#include "sys.h"
// IO方向设置
#define SDA_IN() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=0<<9*2;} // PB9输入模式
#define SDA_OUT() {GPIOB->MODER&=~(3<<(9*2));GPIOB->MODER|=1<<9*2;} // PB9输出模式
// IO操作
#define IIC_SCL PBout(8) // SCL
#define IIC_SDA PBout(9) // SDA
#define READ_SDA PBin(9) // 输入SDA
// IIC所有操作函数
void IIC_Init(void); //初始化IIC的IO口
void IIC_Start(void); //发送IIC开始信号
void IIC_Stop(void); //发送IIC停止信号
void IIC_Send_Byte(u8 txd); //IIC发送一个字节
u8 IIC_Read_Byte(unsigned char ack);//IIC读取一个字节
u8 IIC_Wait_Ack(void); //IIC等待ACK信号
void IIC_Ack(void); //IIC发送ACK信号
void IIC_NAck(void); //IIC不发送ACK信号
void IIC_Write_One_Byte(u8 daddr,u8 addr,u8 data);
u8 IIC_Read_One_Byte(u8 daddr,u8 addr);
#endif
2.3 软件模拟I2C
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT(); // sda线输出
IIC_SDA = 1; // 起始信号,SDA拉高
IIC_SCL = 1; // 拉高时钟
delay_us(4);
IIC_SDA=0; // 拉低数据线
delay_us(4);
IIC_SCL = 0; // 钳住I2C总线,准备发送或接收数据
}
// 产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT(); // sda线输出
IIC_SCL = 0; // 拉低时钟
IIC_SDA = 0; // 产生停止信号
delay_us(4);
IIC_SCL = 1; // 拉高时钟
IIC_SDA = 1; // 发送I2C总线结束信号
delay_us(4);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime = 0;
SDA_IN(); // SDA设置为输入
IIC_SDA = 1; // 拉高时钟
delay_us(1);
IIC_SCL = 1; // 拉高数据线
delay_us(1);
while(READ_SDA) // 等待应答信号到来
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop(); // 产生停止信号
return 1;
}
}
IIC_SCL = 0; // 时钟输出0
return 0;
}
// 产生ACK应答
void IIC_Ack(void)
{
IIC_SCL = 0; // 时钟输出0
SDA_OUT(); // SDA设置为输出
IIC_SDA = 0; // 产生ACK
delay_us(2);
IIC_SCL = 1; // 时钟输出1
delay_us(2);
IIC_SCL = 0; // 时钟输出0
}
//不产生ACK应答
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//拉低时钟开始数据传输
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); // 对TEA5767这三个延时都是必须的
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
// 读1个字节,ack=1时,发送ACK,ack=0,发送nACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//发送nACK
else
IIC_Ack(); //发送ACK
return receive;
}
该部分为 IIC 驱动代码,实现包括 IIC 的初始化(IO 口)、 IIC 开始、 IIC 结束、 ACK、 IIC读写等功能,在其他函数里面,只需要调用相关的 IIC 函数就可以和外部 IIC 器件通信了,这里并不局限于 24C02,该段代码可以用在任何 IIC 设备上。
2.4 在AT24CXX指定地址读出一个数据
// 在AT24CXX指定地址读出一个数据
// ReadAddr:开始读数的地址
// 返回值 :读到的数据
u8 AT24CXX_ReadOneByte(u16 ReadAddr)
{
u8 temp=0;
IIC_Start(); // 产生一个起始信号
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); // 发送写命令
IIC_Wait_Ack(); // 等待应答
IIC_Send_Byte(ReadAddr>>8); // 发送高地址
}
else IIC_Send_Byte(0XA0+((ReadAddr/256)<<1)); //发送器件地址0XA0,写数据
IIC_Wait_Ack(); // 等待应答
IIC_Send_Byte(ReadAddr%256); // 发送低地址
IIC_Wait_Ack(); // 等待应答
IIC_Start(); // 产生一个起始信号
IIC_Send_Byte(0XA1); // 进入接收模式
IIC_Wait_Ack(); // 等待应答
temp=IIC_Read_Byte(0); // 读取一个字节
IIC_Stop();//产生一个停止条件
return temp;
}
2.5 在AT24CXX指定地址写入一个数据
// 在AT24CXX指定地址写入一个数据
// WriteAddr :写入数据的目的地址
// DataToWrite:要写入的数据
void AT24CXX_WriteOneByte(u16 WriteAddr,u8 DataToWrite)
{
IIC_Start();
if(EE_TYPE>AT24C16)
{
IIC_Send_Byte(0XA0); //发送写命令
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr>>8);//发送高地址
}else IIC_Send_Byte(0XA0+((WriteAddr/256)<<1)); //发送器件地址0XA0,写数据
IIC_Wait_Ack();
IIC_Send_Byte(WriteAddr%256); //发送低地址
IIC_Wait_Ack();
IIC_Send_Byte(DataToWrite); //发送字节
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
delay_ms(10);
}
2.6 读写长数据
// 在AT24CXX里面的指定地址开始写入长度为Len的数据
// 该函数用于写入16bit或者32bit的数据.
// WriteAddr :开始写入的地址
// DataToWrite:数据数组首地址
// Len :要写入数据的长度2,4
void AT24CXX_WriteLenByte(u16 WriteAddr,u32 DataToWrite,u8 Len)
{
u8 t;
for(t=0;t<Len;t++)
{
AT24CXX_WriteOneByte(WriteAddr+t,(DataToWrite>>(8*t))&0xff);
}
}
// 在AT24CXX里面的指定地址开始读出长度为Len的数据
// 该函数用于读出16bit或者32bit的数据.
// ReadAddr :开始读出的地址
// 返回值 :数据
// Len :要读出数据的长度2,4
u32 AT24CXX_ReadLenByte(u16 ReadAddr,u8 Len)
{
u8 t;
u32 temp=0;
for(t=0;t<Len;t++)
{
temp<<=8;
temp+=AT24CXX_ReadOneByte(ReadAddr+Len-t-1);
}
return temp;
}
2.7 检测AT24XX是否正常
// 检查AT24CXX是否正常
// 这里用了24XX的最后一个地址(255)来存储标志字.
// 如果用其他24C系列,这个地址要修改
// 返回1:检测失败
// 返回0:检测成功
u8 AT24CXX_Check(void)
{
u8 temp;
temp=AT24CXX_ReadOneByte(255);//避免每次开机都写AT24CXX
if(temp==0X55)return 0;
else//排除第一次初始化的情况
{
AT24CXX_WriteOneByte(255,0X55); // 写入标志字
temp=AT24CXX_ReadOneByte(255);
if(temp==0X55)return 0;
}
return 1;
}
2.8 读写指定个数的数据
// 在AT24CXX里面的指定地址开始读出指定个数的数据
// ReadAddr :开始读出的地址 对24c02为0~255
// pBuffer :数据数组首地址
// NumToRead:要读出数据的个数
void AT24CXX_Read(u16 ReadAddr,u8 *pBuffer,u16 NumToRead)
{
while(NumToRead)
{
*pBuffer++=AT24CXX_ReadOneByte(ReadAddr++); // 读取一个字节
NumToRead--;
}
}
// 在AT24CXX里面的指定地址开始写入指定个数的数据
// WriteAddr :开始写入的地址 对24c02为0~255
// pBuffer :数据数组首地址
// NumToWrite:要写入数据的个数
void AT24CXX_Write(u16 WriteAddr,u8 *pBuffer,u16 NumToWrite)
{
while(NumToWrite--)
{
AT24CXX_WriteOneByte(WriteAddr,*pBuffer); // 写入一个字节
WriteAddr++;
pBuffer++;
}
}
2.9 主函数
// 要写入到24c02的字符串数组
const u8 TEXT_Buffer[]={"Explorer STM32F4 IIC TEST"};
#define SIZE sizeof(TEXT_Buffer) // 字符串数组大小
int main(void)
{
u8 key;
u16 i=0;
u8 datatemp[SIZE];
HAL_Init(); // 初始化HAL库
Stm32_Clock_Init(336,8,2,7); // 设置时钟,168Mhz
delay_init(168); // 初始化延时函数
uart_init(115200); // 初始化USART
usmart_dev.init(84); // 初始化USMART
LED_Init(); // 初始化LED
KEY_Init(); // 初始化KEY
LCD_Init(); // 初始化LCD
AT24CXX_Init(); // 初始化IIC
POINT_COLOR=RED;
LCD_ShowString(30,50,200,16,16,"Apollo STM32F4/F7");
LCD_ShowString(30,70,200,16,16,"IIC TEST");
LCD_ShowString(30,130,200,16,16,"KEY1:Write KEY0:Read"); //显示提示信息
while(AT24CXX_Check())//检测不到24c02
{
LCD_ShowString(30,150,200,16,16,"24C02 Check Failed!");
delay_ms(500);
LCD_ShowString(30,150,200,16,16,"Please Check! ");
delay_ms(500);
LED0=!LED0;//DS0闪烁
}
LCD_ShowString(30,150,200,16,16,"24C02 Ready!");
POINT_COLOR=BLUE;//设置字体为蓝色
while(1)
{
key=KEY_Scan(0);
if(key==KEY1_PRES)//KEY1按下,写入24C02
{
LCD_Fill(0,170,239,319,WHITE);//清除半屏
LCD_ShowString(30,170,200,16,16,"Start Write 24C02....");
AT24CXX_Write(0,(u8*)TEXT_Buffer,SIZE); // 写入字符串数组到24c02
LCD_ShowString(30,170,200,16,16,"24C02 Write Finished!");//提示传送完成
}
{
LCD_ShowString(30,170,200,16,16,"Start Read 24C02.... ");
AT24CXX_Read(0,datatemp,SIZE);
LCD_ShowString(30,170,200,16,16,"The Data Readed Is: ");//提示传送完成
LCD_ShowString(30,190,200,16,16,datatemp);//显示读到的字符串
}
i++;
delay_ms(10);
if(i==20)
{
LED0=!LED0;//提示系统正在运行
i=0;
}
}
}
3. 小结
我们尝试了软件模拟I2C,下面我们可以试试STM32F4硬件I2C读写24C02
硬件连接
- STM32F4 开发板的 I2C 引脚连接到 24C02:
- SDA (数据线) 连接到 STM32 的 SDA 引脚(如
PB7)。 - SCL (时钟线) 连接到 STM32 的 SCL 引脚(如
PB6)。 - 24C02 的 VCC 连接到 3.3V,GND 连接到 GND。
- SDA (数据线) 连接到 STM32 的 SDA 引脚(如
- 注意:在 SDA 和 SCL 上接上拉电阻(通常为 4.7kΩ)。
实现详细代码
#include "main.h"
#define EEPROM_I2C_ADDRESS 0xA0 // 24C02 EEPROM 地址
#define PAGE_SIZE 8 // 24C02 每页大小
I2C_HandleTypeDef hi2c1; // I2C 句柄
// 初始化函数声明
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
// 写入 EEPROM 函数
HAL_StatusTypeDef EEPROM_Write(uint8_t *data, uint16_t size, uint16_t address) {
HAL_StatusTypeDef status;
// 循环写入数据
for (uint16_t i = 0; i < size; i++) {
uint8_t buffer[2] = { (uint8_t)(address + i), data[i] }; // 数据缓冲区
status = HAL_I2C_Master_Transmit(&hi2c1, EEPROM_I2C_ADDRESS, buffer, 2, HAL_MAX_DELAY);
if (status != HAL_OK) {
return status; // 返回错误
}
HAL_Delay(5); // 写入延时
}
return HAL_OK; // 成功
}
// 从 EEPROM 读取数据的函数
HAL_StatusTypeDef EEPROM_Read(uint8_t *data, uint16_t size, uint16_t address) {
HAL_StatusTypeDef status;
// 发送起始地址
status = HAL_I2C_Master_Transmit(&hi2c1, EEPROM_I2C_ADDRESS, (uint8_t*)&address, 1, HAL_MAX_DELAY);
if (status != HAL_OK) {
return status; // 返回错误
}
// 读取数据
status = HAL_I2C_Master_Receive(&hi2c1, EEPROM_I2C_ADDRESS, data, size, HAL_MAX_DELAY);
return status; // 返回状态
}
// 主函数
int main(void) {
HAL_Init(); // 初始化 HAL 库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化 GPIO
MX_I2C1_Init(); // 初始化 I2C
// 示例数据
uint8_t data_to_write[PAGE_SIZE] = { 0xDE, 0xAD, 0xBE, 0xEF, 0x00, 0x11, 0x22, 0x33 };
uint8_t data_read[PAGE_SIZE] = { 0 };
// 写入 EEPROM
if (EEPROM_Write(data_to_write, PAGE_SIZE, 0x00) != HAL_OK) {
// 写入错误处理
}
// 从 EEPROM 读取数据
if (EEPROM_Read(data_read, PAGE_SIZE, 0x00) != HAL_OK) {
// 读取错误处理
}
// 在这里可以添加处理 data_read 数据的代码
while (1) {
// 主循环代码
}
}
// I2C 初始化
static void MX_I2C1_Init(void) {
hi2c1.Instance = I2C1; // I2C 实例
hi2c1.Init.ClockSpeed = 100000; // 设置时钟速度
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; // 设置占空比
hi2c1.Init.OwnAddress1 = 0; // 主机地址
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 7位地址模式
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; // 禁用双地址模式
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK; // 2号地址掩码
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; // 禁用一般呼叫
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 禁用不拉伸
HAL_I2C_Init(&hi2c1); // 初始化 I2C
}
// 系统时钟配置
void SystemClock_Config(void) {
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
// 配置振荡器
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 16;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
// 配置时钟
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5);
}
// GPIO 初始化
static void MX_GPIO_Init(void) {
// 此处可以初始化 GPIO,必要时添加代码
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号