
第4章 STM32F4 GPIO介绍
第四章 STM32F4 IO口介绍
1. 导入
STM32F4 每组通用 I/O 端口包括 4 个 32 位配置寄存器(MODER、 OTYPER、 OSPEEDR和 PUPDR)、 2 个 32 位数据寄存器(IDR 和 ODR)、 1 个 32 位置位/复位寄存器 (BSRR)、1 个 32 位锁定寄存器 (LCKR) 和 2 个 32 位复用功能选择寄存器(AFRH 和 AFRL)等。
这样, STM32F4 每组 IO 有 10 个 32 位寄存器控制,其中常用的有 4 个配置寄存器 + 2 个数据寄存器 + 2 个复用功能选择寄存器,共 8 个,如果在使用的时候,每次都直接操作寄存器配置IO, 代码会比较多,也不容易记住,所以我们在讲解寄存器的同时会讲解使用 HAL 库函数配置 IO 的方法。
同 STM32F1 一样, STM32F4 的 IO 可以由软件配置成如下 8 种模式中的任何一种:
-
输入浮空
-
输入上拉
-
输入下拉
-
模拟输出
-
开漏输出
-
推挽输出
-
推挽式复用功能
-
开漏式复用功能
关于这8种模式的更多介绍:明解STM32—GPIO理论基础知识篇之八种工作模式 - 知乎
2. 相关寄存器介绍
接下来我们详细介绍 IO 配置常用的 8 个寄存器: MODER、 OTYPER、 OSPEEDR、 PUPDR、 ODR、 IDR 、 AFRH 和 AFRL。同时讲解对应的库函数配置方法。
2.1 MODER寄存器
该寄存器是 GPIO 端口模式控制寄存器,用于控制 GPIOx (STM32F4 最多有 9 组 IO,分别用大写字母表示,即 x=A/B/C/D/E/F/G/H/I,下同)的工作模式。
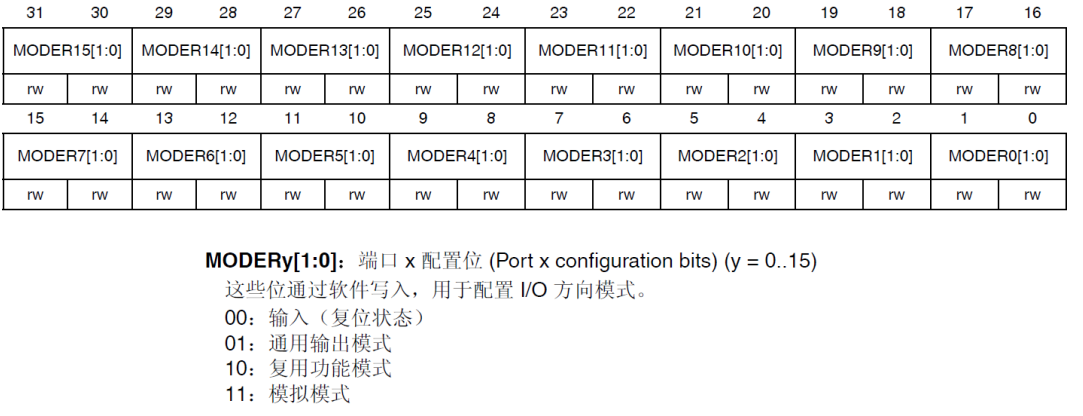
该寄存器各位在复位后,一般都是 0(个别不是 0,比如 JTAG 占用的几个 IO 口),也就是默认条件下一般是输入状态的。每组 IO 下有 16 个 IO 口,该寄存器共 32 位,每 2 个位控制 1个 IO,
假设我们要将GPIOA的第0引脚配置为输出模式,第1引脚配置为复用模式,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
void GPIO_Init(void) {
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置MODER寄存器
// 设置PA0为输出模式(01),PA1为复用模式(10)
GPIOA->MODER &= ~(0x00000003); // 清零PA0
GPIOA->MODER |= (0x00000001); // PA0设置为输出模式
GPIOA->MODER &= ~(0x0000000C); // 清零PA1
GPIOA->MODER |= (0x00000008); // PA1设置为复用模式
}
2.2 OSPEEDR寄存器
该寄存器用于控制 GPIOx 的输出速度,该寄存器各位描述见表
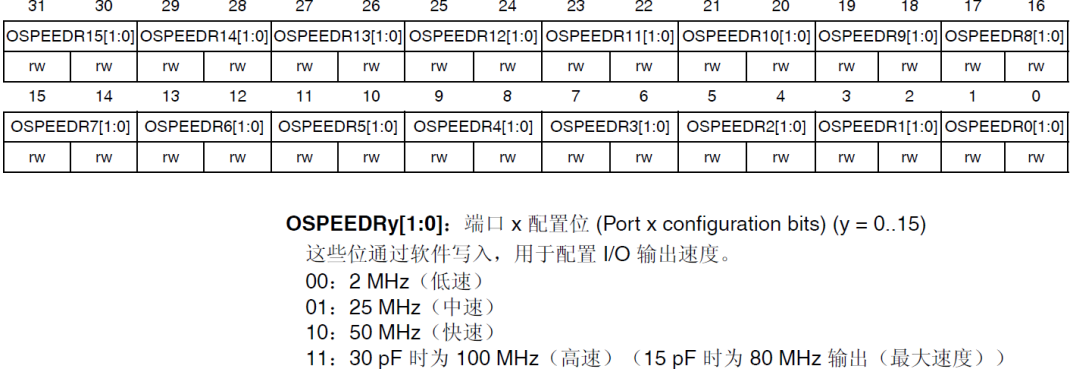
该寄存器也仅用于输出模式,寄存器每 2 个位控制一个 IO 口,复位后,该寄存器值一般为 0。
假设我们要将GPIOA的第0引脚配置为高速,第1引脚配置为超高速,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
void GPIO_Init(void) {
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置OSPEEDR寄存器
// 设置PA0为高速(10),PA1为超高速(11)
GPIOA->OSPEEDR &= ~(0x00000003); // 清零PA0
GPIOA->OSPEEDR |= (0x00000002); // PA0设置为高速
GPIOA->OSPEEDR &= ~(0x0000000C); // 清零PA1
GPIOA->OSPEEDR |= (0x0000000C); // PA1设置为超高速
}
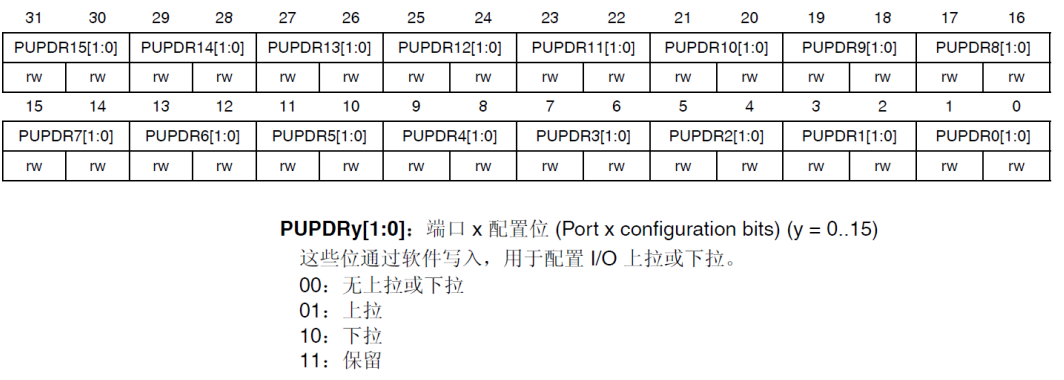
2.3 PUPDR寄存器
该寄存器用于控制 GPIOx 的上拉/下拉,该寄存器各位描述见表:
假设要将GPIOA的第0引脚配置为上拉,第1引脚配置为下拉,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
void GPIO_Init(void) {
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置PUPDR寄存器
// 设置PA0为上拉(01),PA1为下拉(10)
GPIOA->PUPDR &= ~(0x00000003); // 清零PA0
GPIOA->PUPDR |= (0x00000001); // PA0设置为上拉
GPIOA->PUPDR &= ~(0x0000000C); // 清零PA1
GPIOA->PUPDR |= (0x00000002); // PA1设置为下拉
}
该寄存器每 2 个位控制一个 IO 口,用于设置上下拉,这里提醒大家, STM32F1 是通过 ODR寄存器控制上下拉的,而 STM32F4则由单独的寄存器 PUPDR控制上下拉,使用起来更加灵活。复位后,该寄存器值一般为 0。
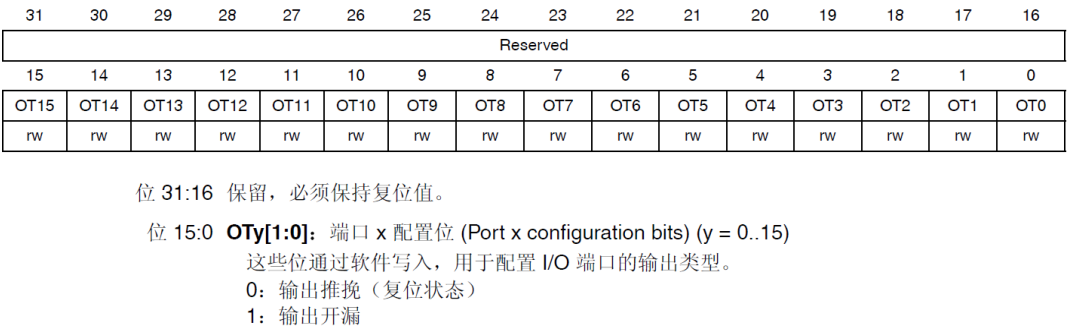
2.4 OTYPER寄存器
该寄存器用于控制 GPIOx 的输出类型,该寄存器各位描述见表:
假设要将GPIOA的第0引脚配置为推挽输出,第1引脚配置为开漏输出,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
void GPIO_Init(void) {
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置OTYPER寄存器
GPIOA->OTYPER &= ~(0x00000001); // 清零PA0,配置为推挽输出
GPIOA->OTYPER |= (0x00000002); // 设置PA1为开漏输出
}
2.5 GPIO初始化函数
在 HAL 库开发中, 操作上面介绍四个配置寄存器初始化 GPIO 是通过 GPIO 初始化函数完成:
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
这个函数有两个参数,第一个参数是用来指定需要初始化的 GPIO 对应的 GPIO 组,取值范围为 GPIOA~GPIOK。第二个参数为初始化参数结构体指针,结构体类型为 GPIO_InitTypeDef。下面我们看看这个结构体的定义。
typedef struct
{
uint32_t Pin; // 引脚
uint32_t Mode;// 模式
uint32_t Pull;// 上/下拉
uint32_t Speed;// 速度
uint32_t Alternate;
}GPIO_InitTypeDef;
下面来举一个例子:
GPIO_Initure.Pin = GPIO_PIN_9|GPIO_PIN_10;// PF9,10
GPIO_Initure.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_Initure.Pull = GPIO_PULLUP; // 上拉
GPIO_Initure.Speed = GPIO_SPEED_HIGH; // 高速
HAL_GPIO_Init(GPIOF,&GPIO_Initure); // 初始化GPIO
上面代码的意思是设置 GPIOF 的第 9 和 10 端口为推挽输出模式,同时速度为 100M,上拉。
看完了 GPIO 的参数配置寄存器,接下来我们看看 GPIO 输入输出电平控制相关的寄存器。
2.6 ODR寄存器
该寄存器用于控制 GPIOx 的输出,该寄存器各位描述见表:
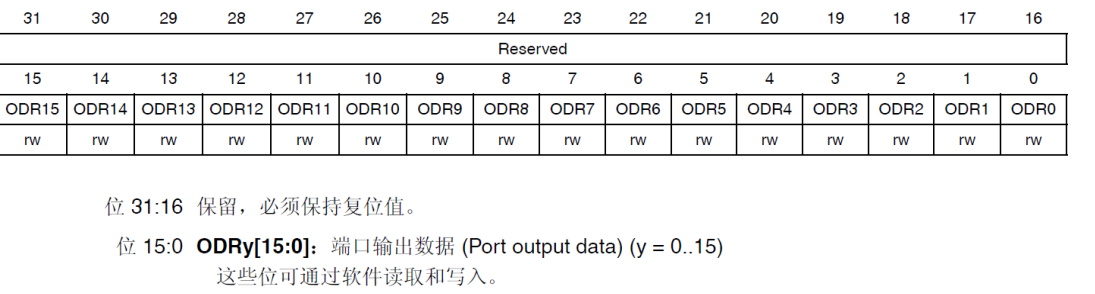
该寄存器用于设置某个 IO 输出低电平(ODRy=0)还是高电平(ODRy=1),该寄存器也仅在输出模式下有效。
假设要将GPIOA的第0引脚设置为高电平,第1引脚设置为低电平,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
void GPIO_Init(void) {
// 使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置GPIOA引脚模式等(省略具体配置代码)
}
void Set_GPIO_State(void) {
// 设置PA0为高电平
GPIOA->ODR |= (1 << 0); // PA0 = 1
// 设置PA1为低电平
GPIOA->ODR &= ~(1 << 1); // PA1 = 0
}
在HAL 库中设置 ODR 寄存器的值来控制 IO 口的输出状态是通过函数 HAL_GPIO_WritePin 来实现的:
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
- GPIOx: 指向要操作的 GPIO 端口的指针,例如
GPIOA,GPIOB, 等等。 - GPIO_Pin: 要设置的 GPIO 引脚,可以是单个引脚或多个引脚的组合,使用按位或(
|)操作符来结合多个引脚。例如,可以使用GPIO_PIN_0 | GPIO_PIN_1来同时设置引脚 0 和引脚 1。 - PinState: 指定引脚的状态,类型为
GPIO_PinState,通常有两个取值:GPIO_PIN_SET: 将引脚设置为高电平。GPIO_PIN_RESET: 将引脚设置为低电平。
2.7 IDR寄存器
该寄存器用于读取 GPIOx 的输入电平状态,该寄存器各位描述见表:
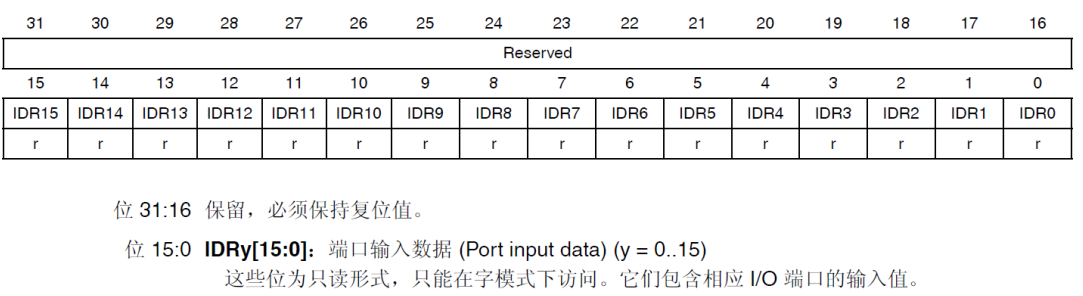
该寄存器用于读取某个 IO 的电平,如果对应的位为 0(IDRy=0),则说明该 IO 输入的是低电平,如果是 1(IDRy=1),则表示输入的是高电平。 库函数相关函数为:
GPIO_PinState = HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
函数是用来读取一组 IO 口的一个输入电平。 比如我们要读取 GPIOF.5 的输入电平,方法为
HAL_GPIO_ReadPin (GPIOF, GPIO_Pin_5);
假设要读取 GPIOA 的第0引脚和第1引脚的输入状态,可以按以下步骤操作:
#include "stm32f4xx_hal.h"
// 假设已经初始化了系统时钟和 GPIO
void GPIO_Init(void) {
// 使能 GPIOA 时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置 PA0 和 PA1 为输入模式
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1; // 选择引脚 PA0 和 PA1
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 输入模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉电阻
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化 GPIO
}
void Read_GPIO_State(void) {
// 读取 PA0 和 PA1 的输入状态
GPIO_PinState state_PA0 = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0);
GPIO_PinState state_PA1 = HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1);
if (state_PA0 == GPIO_PIN_SET) {
// PA0 为高电平
} else {
// PA0 为低电平
}
if (state_PA1 == GPIO_PIN_SET) {
// PA1 为高电平
} else {
// PA1 为低电平
}
}
int main(void) {
HAL_Init(); // 初始化 HAL 库
GPIO_Init(); // 初始化 GPIO
while (1) {
Read_GPIO_State(); // 读取 GPIO 输入状态
HAL_Delay(100); // 延迟
}
}
2.8 BSRR寄存器
这个寄存器是用来置位或者复位 IO 口, 该寄存器和 ODR 寄存器具有类似的作用,都可以用来设置 GPIO 端口的输出位是1 还是 0。寄存器描述如下:
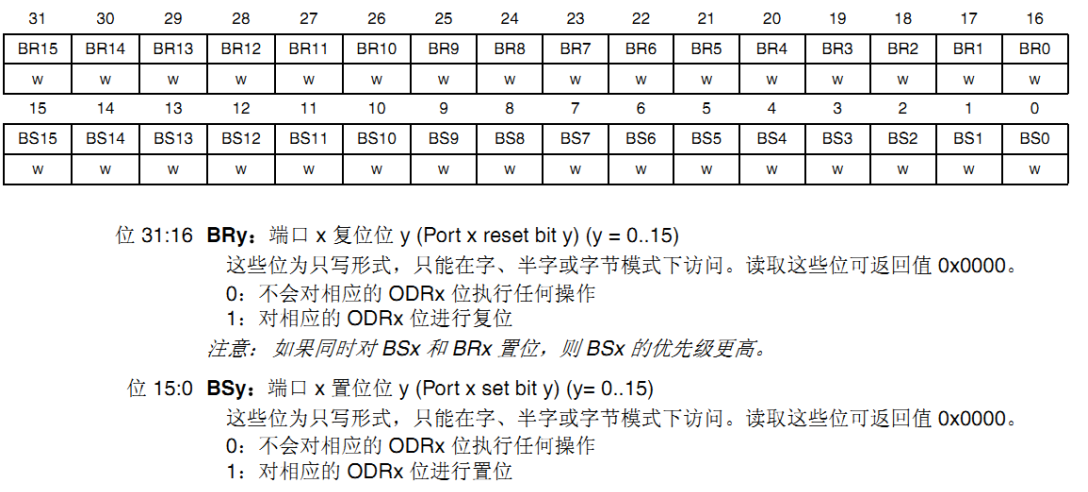
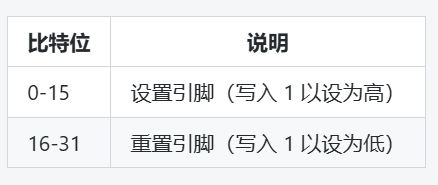
对于低 16 位(0-15),我们往相应的位写 1,那么对应的 IO 口会输出高电平,往相应的位写 0,对 IO 口没有任何影响。高 16 位(16-31)作用刚好相反,对相应的位写 1 会输出低电平,写 0没有任何影响。
- 设置引脚:将指定引脚设置为高电平
- 复位引脚:将指定引脚设置为低电平
假设要将 GPIOA 的引脚 0 设置为高电平,并将引脚 1 复位为低电平,可以按以下方式操作:
#include "stm32f4xx_hal.h"
// 假设已经初始化了系统时钟和 GPIO
void GPIO_Init(void) {
// 使能 GPIOA 时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置 PA0 和 PA1 为输出模式
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1; // 选择引脚 PA0 和 PA1
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 设置速度
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化 GPIO
}
void Control_GPIO(void) {
// 设置 PA0 为高电平
GPIOA->BSRR = GPIO_PIN_0; // 设置引脚 PA0
// 将 PA1 复位为低电平
GPIOA->BSRR = (GPIO_PIN_1 << 16); // 重置引脚 PA1
}
int main(void) {
HAL_Init(); // 初始化 HAL 库
GPIO_Init(); // 初始化 GPIO
while (1) {
Control_GPIO(); // 控制 GPIO 输出状态
HAL_Delay(1000); // 每秒更新一次
}
}
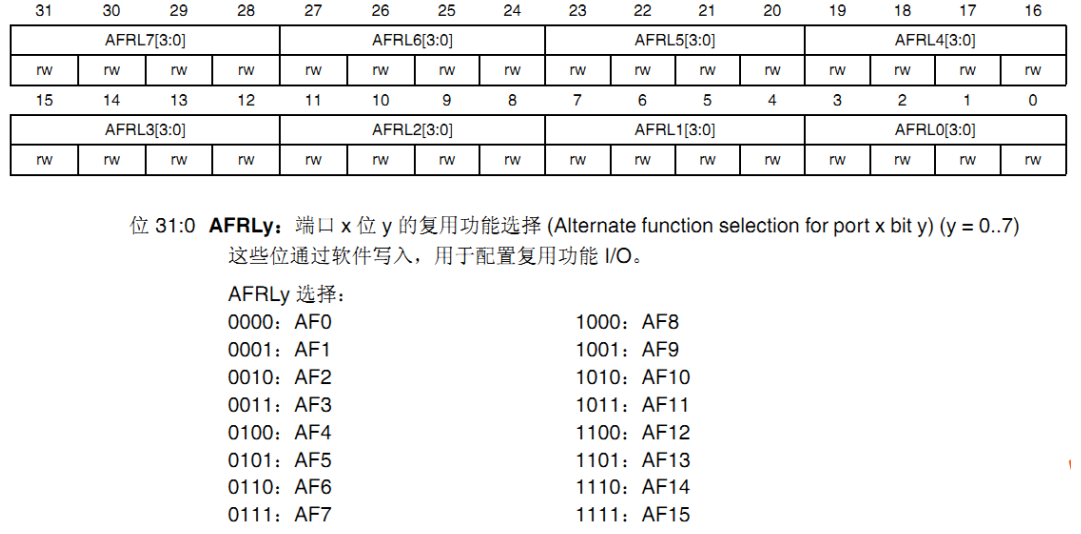
2.9 AFRL与AFRH寄存器
32 位寄存器 GPIOx_AFRL GPIOx_AFRH每四个位控制一个 IO 口,所以每个寄存器控制32/4=8 个 IO 口。寄存器对应四位的值配置决定这个 IO 映射到哪个复用功能 AF。
这两个寄存器允许你将特定的 GPIO 引脚配置为不同的功能,比如 UART、SPI、I2C 等。它通过设置不同的比特位来选择引脚的替代功能。

假设要将 GPIOA 的引脚 9 和引脚 10 配置为其替代功能(例如,USART),可以按以下方式操作:
#include "stm32f4xx_hal.h"
// 假设已经初始化了系统时钟和 GPIO
void GPIO_Init(void) {
// 使能 GPIOA 时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置 PA9 和 PA10 为替代功能
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_9 | GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 推挽替代功能
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; // 设置速度
GPIO_InitStruct.Alternate = GPIO_AF7_USART1; // 选择 USART1 的替代功能
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化 GPIO
}
int main(void) {
HAL_Init(); // 初始化 HAL 库
GPIO_Init(); // 初始化 GPIO
while (1) {
// 主循环
}
}
3. HAL库配置IO
3.1 输出模式(Push-Pull 或 Open-Drain)
推挽输出:通常用于控制 LED、继电器等输出设备。这是最常用的输出模式。
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉/下拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
开漏输出:用于 I2C 等需要开漏通信的场合。
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出模式
GPIO_InitStruct.Pull = GPIO_PULLUP; // 使用上拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
3.2 输入模式(Analog, Digital, or Interrupt)
普通输入模式:用于读取外部信号。
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 输入模式
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 使用下拉电阻
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
中断输入模式:用于 GPIO 引脚的中断触发。
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; // 上升沿中断
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉/下拉电阻
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
3.3 模拟模式
模拟模式一般用于 ADC 和 DAC 的引脚。此模式下,GPIO 会进入低功耗模式,不会进行数字化操作。
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 模拟模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉/下拉电阻
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
3.4 复用功能模式
STM32F4 的 GPIO 支持复用功能,用于外设接口如 UART、SPI、I2C 等。通过设置 GPIO_MODE_AF_PP 或 GPIO_MODE_AF_OD,并指定具体的复用功能编号,GPIO 可以用作这些外设的信号接口。
例如,配置一个 UART 的 TX 引脚:
GPIO_InitStruct.Pin = GPIO_PIN_9; // 选择 TX 引脚
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉电阻
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; // 高速
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化 GPIOA
4. 小结
本章我们就主要介绍了STM32F4 GPIO相关的寄存器,但是我们在开发的时候往往不直接配置寄存器,比如我们可以使用HAL库
2024.9.26 第一次修订,后期不再维护
2024.12.20 更新HAL库配置
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18434572
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步