
第33章 高级定时器-PWM输入捕获实验
第三十三章 高级定时器-PWM输入捕获实验
1. 导入
普通的输入捕获可以使用定时器的四个通道, 一路捕获占用一个捕获寄存器,而PWM输入则只能使用两个通道,即通道1和通道2,且一路PWM输入要占用两个捕获寄存器,一个用于捕获周期, 一个用于捕获占空比。在本节实验中,我们用通用定时器产生一路PWM信号,然后用高级定时器的通道1或者通道2来捕获。
2. 硬件设计
实验中用到两个引脚,一个是通用定时器TIM3的通道1,即PA6,用于输出PWM信号,另一个是高级控制定时器TIM1的通道1, 即PA8,用于PWM输入捕获,实验中直接用一根杜邦线短接即可PA6和PA8即可,同时可用示波器监控PA6的波形,看看实验捕获的数据是否正确。
3. 软件设计
3.1 编程大纲
-
通用定时器产生PWM配置
-
高级定时器PWM输入配置
-
编写中断服务程序,计算测量的频率和占空比,并打印出来比较
编程的要点主要分成两部分,一个是通用定时器的PWM信号输出,另一个是PWM信号输入捕获。
3.2 代码分析
3.2.1 通用定时器宏定义
#ifndef __GENERALTIM_H
#define __GENERALTIM_H
#include "stm32f10x.h"
/* TIM基础配置 */
#define GTIMx TIM3
#define GTIM_APBxClock RCC_APB1PeriphClockCmd
#define GTIM_CLK RCC_APB1Periph_TIM3
#define GTIM_Period 9
#define GTIM_Prescaler 71
/* 四路输出通道配置 */
#define GTIM_CH1_GPIO_CLK RCC_APB2Periph_GPIOA
#define GTIM_CH1_GPIO_PORT GPIOA
#define GTIM_CH1_GPIO_PIN GPIO_Pin_6
#define GTIM_CH2_GPIO_CLK RCC_APB2Periph_GPIOA
#define GTIM_CH2_GPIO_PORT GPIOA
#define GTIM_CH2_GPIO_PIN GPIO_Pin_7
#define GTIM_CH3_GPIO_CLK RCC_APB2Periph_GPIOB
#define GTIM_CH3_GPIO_PORT GPIOB
#define GTIM_CH3_GPIO_PIN GPIO_Pin_0
#define GTIM_CH4_GPIO_CLK RCC_APB2Periph_GPIOB
#define GTIM_CH4_GPIO_PORT GPIOB
#define GTIM_CH4_GPIO_PIN GPIO_Pin_1
/* CCRx值 */
#define GTIM_CCR1 5
#define GTIM_CCR2 4
#define GTIM_CCR3 3
#define GTIM_CCR4 2
void GTIM_Init(void);
#endif /* __GENERALTIM_H */
使用宏定义非常方便程序升级、移植。通过上面的宏,我们可以算出PWM信号的频率F为:72M/( 10*72 )=100KHZ, 占空比为50%。
3.2.2 通用定时器PWM输出
#include "GeneralTim.h"
static void GTIM_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// TIM1 CH1 GPIO Configuration
RCC_APB2PeriphClockCmd(GTIM_CH1_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GTIM_CH1_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GTIM_CH1_GPIO_PORT, &GPIO_InitStructure);
// TIM1 CH2 GPIO Configuration
RCC_APB2PeriphClockCmd(GTIM_CH2_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GTIM_CH2_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GTIM_CH2_GPIO_PORT, &GPIO_InitStructure);
// TIM1 CH3 GPIO Configuration
RCC_APB2PeriphClockCmd(GTIM_CH3_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GTIM_CH3_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GTIM_CH3_GPIO_PORT, &GPIO_InitStructure);
// TIM1 CH4 GPIO Configuration
RCC_APB2PeriphClockCmd(GTIM_CH4_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = GTIM_CH4_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GTIM_CH4_GPIO_PORT, &GPIO_InitStructure);
}
static void GTIM_Mode_Init(void)
{
GTIM_APBxClock(GTIM_CLK, ENABLE);
// 时基结构初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = GTIM_Period; // 9
TIM_TimeBaseStructure.TIM_Prescaler = GTIM_Prescaler; // 71
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(GTIMx, &TIM_TimeBaseStructure);
// 输出比较模式初始化
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
// CH1
TIM_OCInitStructure.TIM_Pulse = GTIM_CCR1; // 5
TIM_OC1Init(GTIMx, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(GTIMx, TIM_OCPreload_Enable); // 预装载使能
// CH2
TIM_OCInitStructure.TIM_Pulse = GTIM_CCR2; // 4
TIM_OC2Init(GTIMx, &TIM_OCInitStructure);
// CH3
TIM_OCInitStructure.TIM_Pulse = GTIM_CCR3; // 3
TIM_OC3Init(GTIMx, &TIM_OCInitStructure);
// CH4
TIM_OCInitStructure.TIM_Pulse = GTIM_CCR4; // 2
TIM_OC4Init(GTIMx, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(GTIMx, TIM_OCPreload_Enable);
TIM_Cmd(GTIMx, ENABLE);
}
void GTIM_Init(void)
{
GTIM_GPIO_Init();
GTIM_Mode_Init();
}
3.2.3 高级定时器宏定义
#ifndef __ADVANCE_TIM_H
#define __ADVANCE_TIM_H
#include "stm32f10x.h"
/* TIM1基础配置 */
#define ATIMx TIM1
#define ATIM_APBxClock RCC_APB2PeriphClockCmd
#define ATIM_CLK RCC_APB2Periph_TIM1
#define ATIM_Period 999
#define ATIM_Prescaler 71
/* 输入捕获通道配置 */
#define ATIM_CH1_GPIO_CLK RCC_APB2Periph_GPIOA
#define ATIM_CH1_GPIO_PORT GPIOA
#define ATIM_CH1_GPIO_PIN GPIO_Pin_8
#define ATIM_IC1PWM_CHANNEL TIM_Channel_1
#define ATIM_IC2PWM_CHANNEL TIM_Channel_2
/* 中断相关配置 */
#define ATIM_IRQ TIM1_CC_IRQn
#define ATIM_IRQHandler TIM1_CC_IRQHandler
void ATIMx_Init(void);
#endif /* __ADVANCE_TIM_H */
在上面的宏定义里面,我们可以算出计数器的计数周期为T = 72M/(1000*72) = 1ms,这个是定时器在不溢出的情况下的最大计数周期, 也就是说周期小于1ms的PWM信号都可以被捕获到,转换成频率就是能捕获到的最小的频率为1KHZ。
3.2.4 高级定时器PWM输入捕获模式
#include "AdvanceTim.h"
static void ATIM_NVIC_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = ATIM_IRQ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
static void ATIM_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(ATIM_CH1_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = ATIM_CH1_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(ATIM_CH1_GPIO_PORT, &GPIO_InitStructure);
}
static void ATIM_Mode_Init(void)
{
ATIM_APBxClock(ATIM_CLK, ENABLE); // 72 MHz
// 时基结构初始化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = ATIM_Period; // 999
TIM_TimeBaseStructure.TIM_Prescaler = ATIM_Prescaler; // 71
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(ATIMx, &TIM_TimeBaseStructure);
// 输入捕获结构初始化
// 捕获PWM时需要两个捕获寄存器,一个测周期,一个测占空比
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICInitStructure.TIM_Channel = ATIM_IC1PWM_CHANNEL;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; // 捕获上升沿
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0; // 不滤波
TIM_PWMIConfig(ATIMx, &TIM_ICInitStructure);
/* 当工作做PWM输入模式时,只需要设置触发信号的那一路即可(用于测量周期
另外一路(用来测量占空比)会由硬件自带设置,所以不需要设置。*/
// 捕获通道IC2配置
/*TIM_ICInitStructure.TIM_Channel = ATIM_IC1PWM_CHANNEL;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Falling; // 捕获下降沿
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_IndirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0;
TIM_PWMIConfig(ATIMx, &TIM_ICInitStructure);*/
// 选择输入捕获的触发信号
TIM_SelectInputTrigger(ATIMx, TIM_TS_TI1FP1); // 选择TI1FP1引脚作为触发信号
// 选择从模式:复位模式
// PWM输入模式时,从模式工作在复位模式,当捕获开始时,计数器CNT复位
TIM_SelectSlaveMode(ATIMx, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(ATIMx, TIM_MasterSlaveMode_Enable); // 使能主从模式
TIM_ITConfig(ATIMx, TIM_IT_CC1, ENABLE);
TIM_ClearITPendingBit(ATIMx, TIM_IT_CC1);
TIM_Cmd(ATIMx, ENABLE);
}
void ATIMx_Init(void)
{
ATIM_NVIC_Init();
ATIM_GPIO_Init();
ATIM_Mode_Init();
}
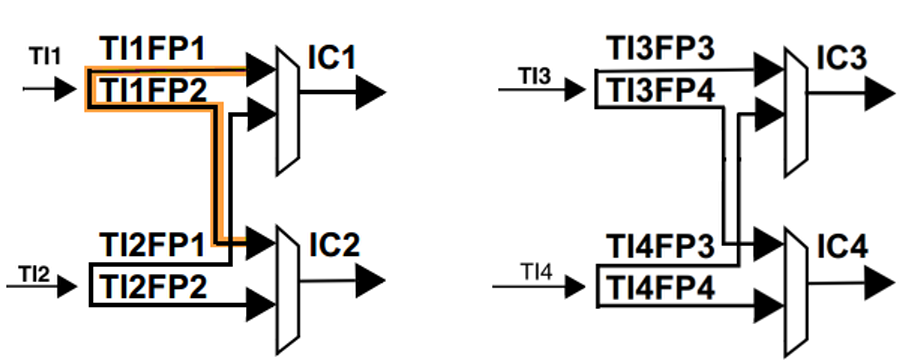
因为是PWM输入模式,只能使用通道1和通道2 ,假如我们使用的是通道1,即TI1,输入的PWM信号会被分成两路,分别是TI1FP1和TI1FP2, 两路都可以是触发信号。如果选择TI1FP1为触发信号,那么IC1捕获到的是PWM信号的周期, IC2捕获到的是占空比, 这种输入通道TI和捕获通道IC的映射关系叫直连,输入捕获结构体的TIM_ICSelection要配置为TIM_ICSelection_DirectTI。如果选择TI1FP2为触发信号, 则IC2捕获到的是周期,IC1捕获到的是占空比,这种输入通道TI和捕获通道IC的映射关系叫非直连, 输入捕获结构体的TIM_ICSelection要配置为TIM_ICSelection_IndirectTI。 有关输入通道TI和捕获通道IC的具体映射关系见图,有直连和非直连两种。
3.2.5 高级定时器中断服务函数
__IO uint16_t IC2Value = 0; // 捕获频率
__IO uint16_t IC1Value = 0; // 捕获占空比
__IO float DutyCycle = 0; // 计算占空比
__IO float Frequency = 0; // 计算频率
/*
* 如果是第一个上升沿中断,计数器会被复位,锁存到CCR1寄存器的值是0,CCR2寄存器的值也是0
* 无法计算频率和占空比。当第二次上升沿到来的时候,CCR1和CCR2捕获到的才是有效的值。其中
* CCR1对应的是周期,CCR2对应的是占空比。
*/
void ATIM_IRQHandler(void)
{
TIM_ClearITPendingBit(ATIMx, TIM_IT_CC1);
IC1Value = TIM_GetCapture1(ATIMx);
IC2Value = TIM_GetCapture2(ATIMx);
printf("IC1Value = %d IC2Value = %d ",IC1Value,IC2Value); // 输出捕获值
// 注意:捕获寄存器CCR1和CCR2的值在计算占空比和频率的时候必须加1,因为计数器是从 0 开始计数的。
if (IC1Value != 0)
{
DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1); // 计算占空比
Frequency = (72000000/(ATIM_Prescaler+1))/(float)(IC1Value+1); // 计算频率
printf("占空比:%0.2f%% 频率:%0.2fHz\n",DutyCycle,Frequency);
}
else
{
DutyCycle = 0;
Frequency = 0;
}
}
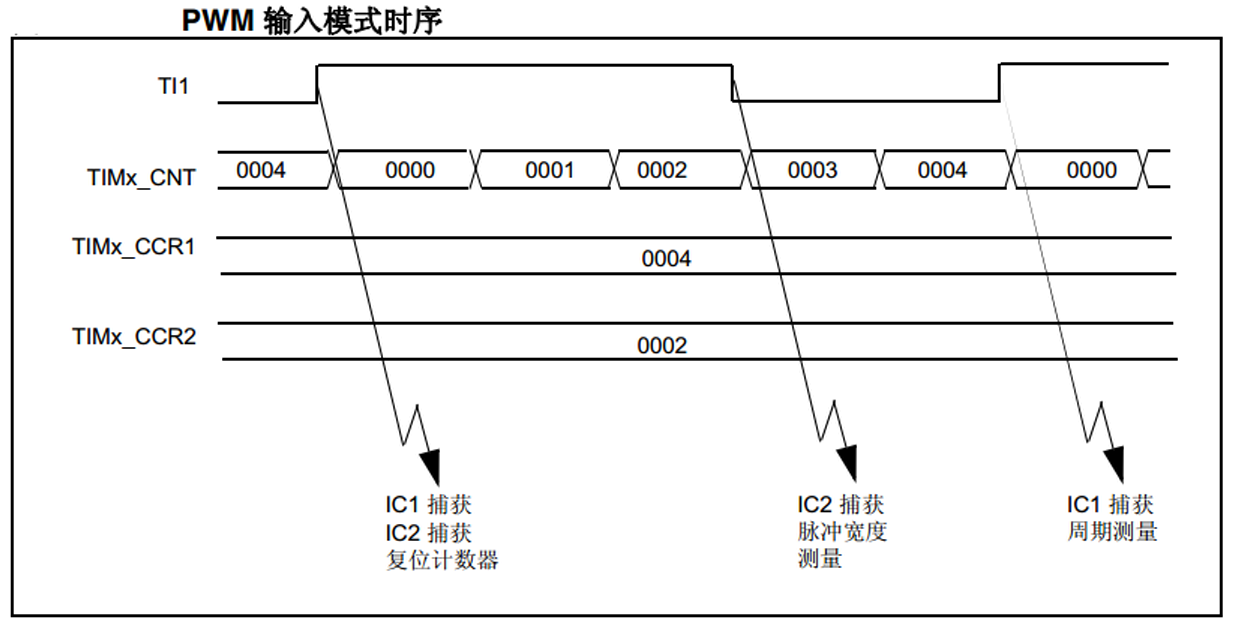
当捕获到PWM信号的第一个上升沿时,产生中断,计数器被复位,锁存到捕获寄存器IC1和IC2的值都为0。当下降沿到来时, IC2会捕获,对应的是占空比,但是会产生中断。当捕获到第二个下降沿时,IC1会捕获,对应的是周期,而且会再次进入中断, 这个时间就可以根据IC1和IC2的值计算出频率和占空比。有关PWM输入的时序见图
中断复位函数中,我们获取输入捕获寄存器CCR1和CCR2寄存器中的值,当CCR1的值不为0时,说明有效捕获到了一个周期, 然后计算出频率和占空比。在计算的时候CCR1和CCR2的值都必须要加1,因为计数器是从0开始计数的。
3.2.6 主函数
int main(void)
{
USART_Config();
GTIM_Init();
ATIM_Init();
while (1)
{
}
}
main函数非常简单,通用定时器初始化完之后用于输出PWM信号,高级定时器初始化完之后用于捕获通用定时器输出的PWM信号。
4. 小结
下面我们来简单回顾一下流程吧:
4.1 实验流程
- 硬件连接
- 将通用定时器的PWM输出引脚(例如
TIM2_CH1)连接到高级定时器的捕获输入引脚(例如TIM1_CH1)。 - 确保STM32F103的时钟设置正确,以便定时器能正常工作。
- 软件配置
- 配置系统时钟,以确保定时器工作在预期频率。
- 配置通用定时器(例如
TIM2)以生成PWM信号。 - 配置高级定时器(例如
TIM1)以捕获PWM信号。 - 配置相应的GPIO引脚作为定时器的输入和输出。
- 配置NVIC中断处理程序(如果需要)。
4.2 代码示例
以下是一个基于STM32标准外设库的代码示例,展示了如何配置TIM2生成PWM信号,并使用TIM1捕获该信号。
#include "stm32f10x.h"
// Function prototypes
void TIM2_PWM_Init(void);
void TIM1_IC_Init(void);
void GPIO_Config(void);
int main(void) {
// Initialize GPIO for PWM output and IC input
GPIO_Config();
// Initialize TIM2 for PWM output
TIM2_PWM_Init();
// Initialize TIM1 for input capture
TIM1_IC_Init();
while (1) {
// Main loop
}
}
void GPIO_Config(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// Enable GPIO clocks
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// Configure PA0 (TIM2 CH1) as alternate function push-pull
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Configure PA8 (TIM1 CH1) as alternate function push-pull
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void TIM2_PWM_Init(void) {
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// Enable TIM2 clock
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// Time base configuration
TIM_TimeBaseStructure.TIM_Period = 999; // Auto-reload register
TIM_TimeBaseStructure.TIM_Prescaler = 71; // Prescaler value
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
// PWM mode configuration
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 499; // Compare value (duty cycle)
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
// Enable TIM2
TIM_Cmd(TIM2, ENABLE);
}
void TIM1_IC_Init(void) {
TIM_ICInitTypeDef TIM_ICInitStructure;
// Enable TIM1 clock
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
// Time base configuration (you may adjust this as needed)
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);
// Input capture configuration
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0;
TIM_ICInit(TIM1, &TIM_ICInitStructure);
// Enable TIM1
TIM_Cmd(TIM1, ENABLE);
}
4.3 代码说明
GPIO_Config(): 配置PA0为TIM2_CH1输出,PA8为TIM1_CH1输入。TIM2_PWM_Init(): 配置TIM2为PWM模式,设置周期和占空比。TIM1_IC_Init(): 配置TIM1为输入捕获模式,捕获TIM2输出的PWM信号。
2024.9.16 第一次修订,后期不再修订
2025.1.28 修订代码
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18416346
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步