
第17章 TIM-基本定时器
第十七章 TIM-基本定时器
1. 定时器分类
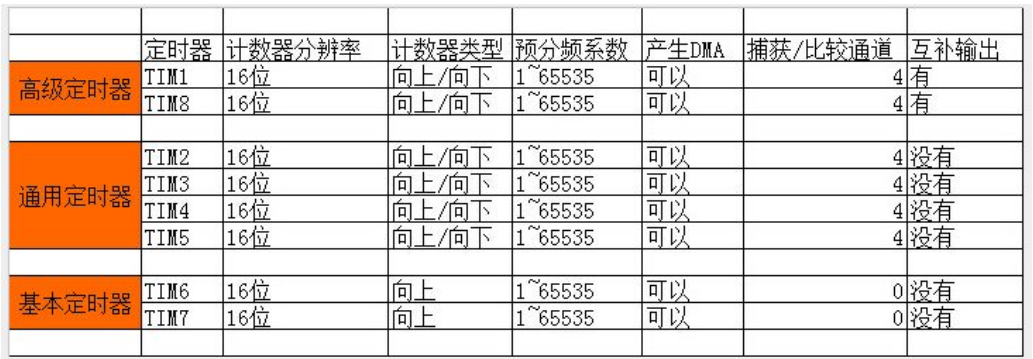
STM32F1 系列中,共有 8个定时器,分为基本定时器,通用定时器和高级定时器。
基本定时器 TIM6 和 TIM7 是一个 16位的只能向上计数的定时器,只能定时,没有外部 IO。
通用定时器 TIM2/3/4/5是一个 16位的可以向上/下计数的定时器,可以定时,可以输出比较,可以输入捕捉, 每个定时器有四个外部IO。
高级定时器 TIM1/8是一个 16位的可以向上/下计数的定时器,可以定时,可以输出比较, 可以输入捕捉,还可以有三相电机互补输出信号,每个定时器有8 个外部 IO。更加具体的分类详情见:
2. 基本定时器功能框图讲解
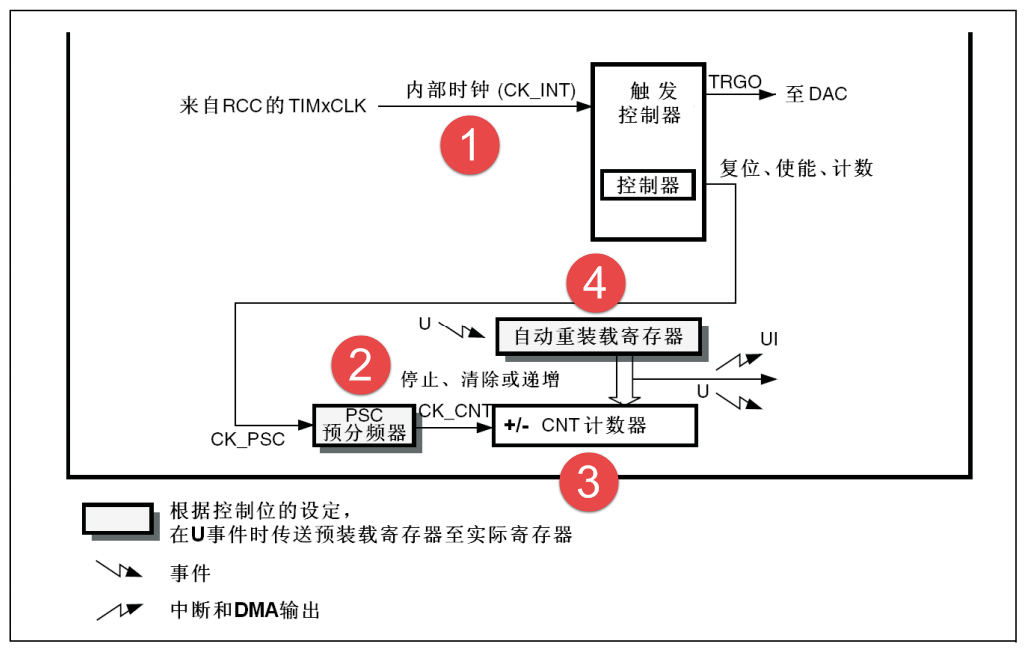
基本定时器的核心是时基,不仅基本定时器有,通用定时器和高级定时器也有。学习定时器时,我们先从简单的基本定时器学起, 到了后面的通用和高级定时器的学习中,我们直接跳过时基部分的讲解即可。 基本定时器的功能框图见图:
2.1 时钟源
定时器时钟 TIMxCLK,即内部时钟 CK_INT,经 APB1预分频器后分频提供,如果APB1 预分频系数等于 1,则频率不变, 否则频率乘以 2,库函数中 APB1预分频的系数是2,即 PCLK1=36M,所以定时器时钟 TIMxCLK = 36*2 = 72M。
2.2 计时器时钟
定时器时钟经过 PSC 预分频器之后,即 CK_CNT,用来驱动计数器计数。PSC是一个16 位的预分频器, 可以对定时器时钟 TIMxCLK 进行 1~65536之间的任何一个数进行分频。具体计算方式为:CK_CNT = TIM x CLK/(PSC+1)。
2.3 计数器
计数器 CNT 是一个 16 位的计数器,只能往上计数,最大计数值为65535。当计数达到自动重装载寄存器的时候产生更新事件,并清零从头开始计数。
2.4 自动重装载寄存器
自动重装载寄存器 ARR 是一个 16位的寄存器,这里面装着计数器能计数的最大数值。当计数到这个值的时候,如果使能了中断的话,定时器就产生溢出中断。
2.5 定时时间的计算
2.5.1 定时器的时钟频率
定时器计数器的时钟频率通常是由定时器时钟源(TIMxCLK)和预分频器(PSC)共同决定的。具体计算公式为:
fCNT = fTIMxCLK / PSC+1
2.5.2 定时器每次计数所需时间
每次计数(即计数器增加 1)所需的时间是:
Tcount = 1 / fCNT = PSC+1 / fTIMxCLK
2.5.3 产生一次中断的时间(计数器溢出)
定时器计数器从 0 计数到 ARR 时,会发生溢出并产生一个中断。这个过程的时间是:
Tinterrupt = ARR+1 / fCNT = (ARR+1)×(PSC+1) / fTIMxCLK
2.5.4 在中断服务程序中的次数计数
如果在中断服务程序中使用一个变量 time 来记录中断发生的次数,那么在发生 time 次中断后,定时器总的定时时间就是:
Ttotal = Tinterrupt × time = (ARR+1)×(PSC+1)×time / fTIMxCLK
3. 定时器初始化结构体详解
在标准库函数头文件stm32f10x_tim.h中对定时器外设建立了四个初始化结构体,基本定时器只用到其中一个即TIM_TimeBaseInitTypeDef, 其他三个我们在高级定时器章节讲解。
typedef struct {
uint16_t TIM_Prescaler; // 预分频器
uint16_t TIM_CounterMode; // 计数模式
uint32_t TIM_Period; // 定时器周期
uint16_t TIM_ClockDivision; // 时钟分频
uint8_t TIM_RepetitionCounter;// 重复计算器
} TIM_TimeBaseInitTypeDef;
-
TIM_Prescaler: 定时器预分频器设置,时钟源经该预分频器才是定时器时钟,它设定TIMx_PSC寄存器的值。可设置范围为0至65535,实现1至65536分频。
-
TIM_CounterMode: 定时器计数方式,可是在为向上计数、向下计数以及三种中心对齐模式。基本定时器只能是向上计数,即TIMx_CNT只能从0开始递增,并且无需初始化。
-
TIM_Period: 定时器周期,实际就是设定自动重载寄存器的值,在事件生成时更新到影子寄存器。可设置范围为0至65535。
-
TIM_ClockDivision: 时钟分频,设置定时器时钟CK_INT频率与数字滤波器采样时钟频率分频比,基本定时器没有此功能,不用设置。
-
TIM_RepetitionCounter: 重复计数器,属于高级控制寄存器专用寄存器位,利用它可以非常容易控制输出PWM的个数。这里不用设置。
虽然定时器基本初始化结构体有5个成员,但对于基本定时器只需设置其中两个就可以,想想使用基本定时器就是简单。
当然,我们还是要详细解释一下的:
uint16_t TIM_Prescaler:
- 描述: 预分频器,用于分频定时器时钟。定时器时钟频率被这个值分频后,用于实际的计数。
- 数据类型: 16 位无符号整数。
- 作用: 控制定时器计数频率。较大的值将降低定时器的计数速度。
uint16_t TIM_CounterMode:
- 描述: 计数模式,控制计数器的计数方式(如向上计数、向下计数或向上/向下计数)。
- 数据类型: 16 位无符号整数。
- 作用: 定义计数器的运行模式,例如
TIM_COUNTERMODE_UP表示向上计数。
uint32_t TIM_Period:
- 描述: 定时器周期。定时器计数到这个值后,会触发中断或者事件。
- 数据类型: 32 位无符号整数。
- 作用: 决定定时器溢出的时间间隔(以计数器的时钟频率为基准)。
uint16_t TIM_ClockDivision:
- 描述: 时钟分频,用于进一步分频定时器时钟。
- 数据类型: 16 位无符号整数。
- 作用: 控制定时器时钟的精度,例如
TIM_CLOCKDIVISION_DIV1表示不分频。
uint8_t TIM_RepetitionCounter:
- 描述: 重复计算器,用于设置定时器的重复次数。
- 数据类型: 8 位无符号整数。
- 作用: 主要用于高级定时器的功能,如定时器重复计数的设置。
4. 简单举例
假设我们有一个定时器配置的需求,我们希望定时器每 1 秒触发一次中断。假设系统时钟频率为 72 MHz,我们可以使用以下参数进行配置:
TIM_Prescaler: 71- 解释: 将 72 MHz 的时钟频率分频到 1 MHz(
72 MHz / (71 + 1) = 1 MHz)。
- 解释: 将 72 MHz 的时钟频率分频到 1 MHz(
TIM_CounterMode:TIM_COUNTERMODE_UP- 解释: 计数器向上计数。
TIM_Period: 999999- 解释: 计数器周期设置为 999999,即每 1 微秒产生一次溢出。周期为 1 秒。
TIM_ClockDivision:TIM_CLOCKDIVISION_DIV1- 解释: 不对时钟进行额外的分频。
TIM_RepetitionCounter: 0- 解释: 在普通定时器中通常设置为 0,表示没有重复计数器的使用。
TIM_TimeBaseInitTypeDef TIM_InitStruct;
TIM_InitStruct.TIM_Prescaler = 71; // 预分频器
TIM_InitStruct.TIM_CounterMode = TIM_COUNTERMODE_UP; // 向上计数模式
TIM_InitStruct.TIM_Period = 999999; // 周期设置为 999999
TIM_InitStruct.TIM_ClockDivision = TIM_CLOCKDIVISION_DIV1; // 时钟分频
TIM_InitStruct.TIM_RepetitionCounter = 0; // 重复计数器设置为 0
// 假设有一个定时器的初始化函数
TIM_TimeBaseInit(TIM1, &TIM_InitStruct);
下面我们加大难度,配置 TIM2 和 GPIO 进行 LED 闪烁,即定时器产生一次中断,led翻转状态
4.1 硬件设置
- LED: 连接到 GPIOA 的 PIN 5。
- 定时器: 使用 TIM2。
4.2 示例代码
- 初始化 GPIO(LED)
#include "stm32f4xx.h" // 替换为适合你的 STM32 系列的头文件
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
void GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// 使能 GPIOA 时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
// 配置 PA5 为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
- 初始化定时器(TIM2)
#include "stm32f4xx_tim.h"
#include "stm32f4xx_nvic.h"
void TIM2_Init(void) {
TIM_TimeBaseInitTypeDef TIM_InitStructure;
// 使能 TIM2 时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 配置 TIM2
TIM_InitStructure.TIM_Period = 999; // 自动重载寄存器值
TIM_InitStructure.TIM_Prescaler = 7199; // 预分频器
TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_InitStructure);
// 使能更新中断
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
// 启动定时器
TIM_Cmd(TIM2, ENABLE);
// 配置并使能中断
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
- 定时器中断处理函数
void TIM2_IRQHandler(void) {
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) {
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); // 清除中断标志
GPIO_ToggleBits(GPIOA, GPIO_Pin_5); // 切换 PA5 状态(LED)
}
}
- 主函数
int main(void) {
SystemInit(); // 初始化系统时钟(假设已配置)
GPIO_Init(); // 初始化 GPIO(LED)
TIM2_Init(); // 初始化定时器
while (1) {
// 主循环可以处理其他任务
// 这里不需要处理定时器,因为定时器中断会自动处理 LED 状态翻转
}
}
说明
- GPIO 初始化: 使用标准外设库函数
GPIO_Init来配置 GPIO。 - TIM2 初始化: 使用
TIM_TimeBaseInit配置 TIM2 的计时参数,并使能更新中断。 - 中断处理:
TIM2_IRQHandler处理定时器中断并切换 LED 状态。 - 主循环: 同样依赖于定时器中断来控制 LED 闪烁。
2024.9.10 第一次修订,后期不再维护
2025.1.23 优化结构
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18407074
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步