
第12章 USART1接发通信实验
第十二章 USART1接发通信实验
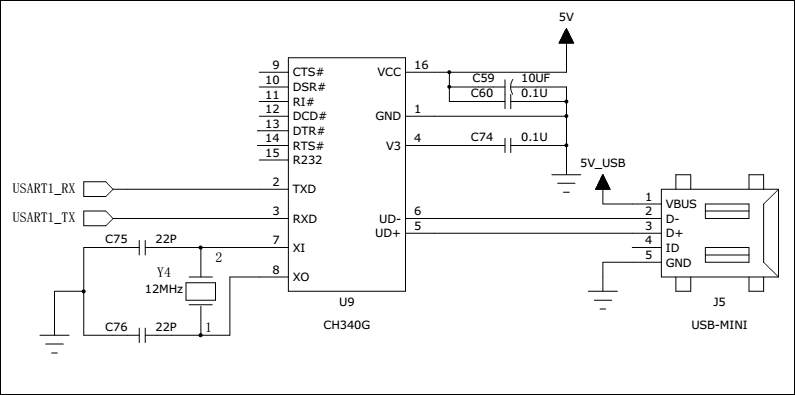
1. 硬件设计
为利用USART实现开发板与电脑通信,需要用到一个USB转USART的IC,我们选择CH340G芯片来实现这个功能,CH340G是一个USB总线的转接芯片, 实现USB转USART、USB转lrDA红外或者USB转打印机接口,我们使用其USB转USART功能。
我们将CH340G的TXD引脚与USART1的RX引脚连接,CH340G的RXD引脚与USART1的TX引脚连接。CH340G芯片集成在开发板上,其地线(GND)已与控制器的GND连通。
2. 软件设计
2.1 编程大纲
-
使能RX和TX引脚GPIO时钟和USART时钟;
-
初始化GPIO,并将GPIO复用到USART上;
-
配置USART参数;
-
配置中断控制器并使能USART接收中断;
-
使能USART;
-
在USART接收中断服务函数实现数据接收和发送。
2.2 代码分析
2.2.1 USART1头文件配置-设置端口、引脚、中断
// USARTx 引脚宏定义
#define USARTx_GPIO_CLK RCC_APB2Periph_GPIOA
#define USARTx_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
// TX-发送数据输出引脚
#define USARTx_TX_GPIO_PORT GPIOA
#define USARTx_TX_GPIO_PIN GPIO_Pin_9
// RX-接收数据输入引脚
#define USARTx_RX_GPIO_PORT GPIOA
#define USARTx_RX_GPIO_PIN GPIO_Pin_10
// USARTx 相关参数宏定义
#define USARTx USART1
#define USARTx_CLK RCC_APB2Periph_USART1
#define USARTx_APBxCLKCmd RCC_APB2PeriphClockCmd
#define USARTx_BaudRate 115200
// NVIC配置
#define USARTx_IRQ USART1_IRQn
#define USARTx_IRQHandler USART1_IRQHandler
使用宏定义方便程序移植和升级 。开发板中的CH340G的收发引脚默认通过跳帽连接到USART1,如果想使用其他串口, 可以把CH340G跟USART1直接的连接跳帽拔掉,然后再把其他串口的IO用杜邦线接到CH340G的收发引脚即可。
这里我们使用USART1,设定波特率为115200,选定USART的GPIO为PA9和PA10。
2.2.2 配置NVIC
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USARTx_IRQ;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
在中断章节已对嵌套向量中断控制器的工作机制做了详细的讲解,这里我们就直接使用,配置USART作为中断源,因为本实验没有使用其他中断,对优先级没什么具体要求。
2.2.3 串口中断服务函数
// 串口中断服务函数
void USART1_IRQHandler(void)
{
uint8_t TempData;
if(USART_GetITStatus(USARTx, USART_IT_RXNE)!= RESET)
{
TempData = USART_ReceiveData(USARTx);
USART_SendData(USARTx, TempData);
}
}
2.2.4 配置USART GPIO及工作参数设置
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
USARTx_GPIO_APBxClkCmd(USARTx_GPIO_CLK, ENABLE);
USARTx_APBxCLKCmd(USARTx_CLK, ENABLE);
// TX引脚配置
GPIO_InitStructure.GPIO_Pin = USARTx_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(USARTx_TX_GPIO_PORT, &GPIO_InitStructure);
// RX引脚配置
GPIO_InitStructure.GPIO_Pin = USARTx_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 输入浮空
GPIO_Init(USARTx_RX_GPIO_PORT, &GPIO_InitStructure);
// USART 配置
USART_InitStructure.USART_BaudRate = USARTx_BaudRate; // 波特率115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长8位数据
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USARTx, &USART_InitStructure);
// NVIC配置
NVIC_Configuration();
USART_ITConfig(USARTx, USART_IT_RXNE, ENABLE); // 使能串口接收中断
USART_Cmd(USARTx, ENABLE); // 使能串口
}
使用GPIO_InitTypeDef和USART_InitTypeDef结构体定义一个GPIO初始化变量以及一个USART初始化变量,这两个结构体内容我们之前已经有详细讲解。
调用RCC_APB2PeriphClockCmd函数开启GPIO端口时钟,使用GPIO之前必须开启对应端口的时钟。使用RCC_APB2PeriphClockCmd函数开启USART时钟。
使用GPIO之前都需要初始化配置它,并且还要添加特殊设置,因为我们使用它作为外设的引脚,一般都有特殊功能。 我们在初始化时需要把它的模式设置为复用功能。这里把串口的Tx引脚配置为复用推挽输出,Rx引脚为浮空输入,数据完全由外部输入决定。
接下来,我们配置USART1通信参数为:波特率115200,字长为8,1个停止位,没有校验位,不使用硬件流控制,收发一体工作模式,然后调用USART初始化函数完成配置。
程序用到USART接收中断,需要配置NVIC,这里调用NVIC_Configuration函数完成配置。配置完NVIC之后调用USART_ITConfig函数使能USART接收中断。
最后调用USART_Cmd函数使能USART,这个函数最终配置的是USART_CR1的UE位,具体的作用是开启USART的工作时钟,没有时钟那USART这个外设自然就工作不了。
照例,我们应该分析一下新出现的库函数:
NVIC_Configuration();:
- 这个函数通常用于配置嵌套向量中断控制器(NVIC)的中断优先级。通过设置中断优先级和中断使能状态,它控制哪个中断源的优先级更高,以及在中断请求时如何响应。
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);:
USART_ITConfig函数用于启用或禁用特定 USART 的中断。在这里,USART_IT_RXNE表示接收数据寄存器非空中断,使能这个中断后,每当接收到新数据时,会触发中断请求。ENABLE表示启用这个中断。
USART_Cmd(DEBUG_USARTx, ENABLE);:
USART_Cmd函数用于使能或禁用指定的 USART 外设。ENABLE参数表示启用 USART,使其开始工作,接收和发送数据。
2.2.5 编写一些数据发送函数
// 发送一个字节函数
// 函数参数:USARTx:串口号,ch:发送的字节
void USART_SendByte(USART_TypeDef *pUSARTx, uint8_t ch)
{
USART_SendData(pUSARTx, ch);
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET); // 等待发送完成
}
// 发送一个8位数组函数
// 函数参数:USARTx:串口号,data:发送的8位数据
void USART_SendArray(USART_TypeDef *pUSARTx, uint8_t *pArray, uint16_t len)
{
uint8_t i;
for(i = 0; i < len; i++)
{
USART_SendByte(pUSARTx, pArray[i]); // 循环写入数组
}
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET); // 等待发送完成
}
// 发送一个字符串函数
// 函数参数:USARTx:串口号,pStr:发送的字符串
void USART_SendString(USART_TypeDef *pUSARTx, uint8_t *pStr)
{
unsigned int k = 0;
do{
USART_SendByte(pUSARTx, *(pStr+k)); // 循环写入字符串
k++;
}while(*(pStr+k)!= '\0'); // 直到遇到结束符‘\0’
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET);
}
// 发送一个16位数据函数
// 函数参数:USARTx:串口号,ch:发送的16位数据
void USART_SendHalfWord(USART_TypeDef *pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l; // 16位数据要分为高位和低位,两次发送
temp_h = (ch & 0xff00) >> 8; // 取高位
temp_l = ch & 0x00ff; // 取低位
USART_SendByte(pUSARTx, temp_h); // 发送高位
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
USART_SendByte(pUSARTx, temp_l); // 发送低位
while(USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
2.2.6 重定向printf和scanf函数到串口-目的是让串口也可以使用
// 重定向printf和scanf函数到串口
int USART_PutChar(int ch, FILE *f) // 函数参数:ch:要发送的字符,f:文件指针
{
USART_SendByte(USARTx, (uint8_t)ch); // 发送字符
while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
return ch; // 返回发送的字符
}
int USART_GetChar(FILE *f) // 函数参数:f:文件指针
{
while(USART_GetFlagStatus(USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USARTx); // 接收字符
}
2.2.7 主函数测试
#include "usart.h"
#include "stm32f10x.h"
int main(void)
{
USART_Config();
// 测试发送一个字符串
USART_SendString(USARTx, "这是一个串口测试程序\r\n");
while(1)
{
}
}
3. 小结
注释已经说得很多了,我们还是总结一下基本流程吧:
-
首先就算USART1的头文件了,我们需要在这里宏定义各种串口需要的资源(GPIO、RCC、NVIC)
-
接着写我们的串口函数了,首先就算初始化NVIV和GPIO了,接着再写我们的功能函数
-
主函数就简单了,直接引用我们已经写好的函数就ok咯
2024.8.24 第一次修订,后期不再维护
2024.12.22 整体大改,把第一版代码很多不必要的删了
本文作者:hazy1k
本文链接:https://www.cnblogs.com/hazy1k/p/18377827
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步