第5章 蜂鸣器实验
第五章 蜂鸣器实验
1. 硬件设计
我们开发板上面使用的有源蜂鸣器,图中BEEP1:
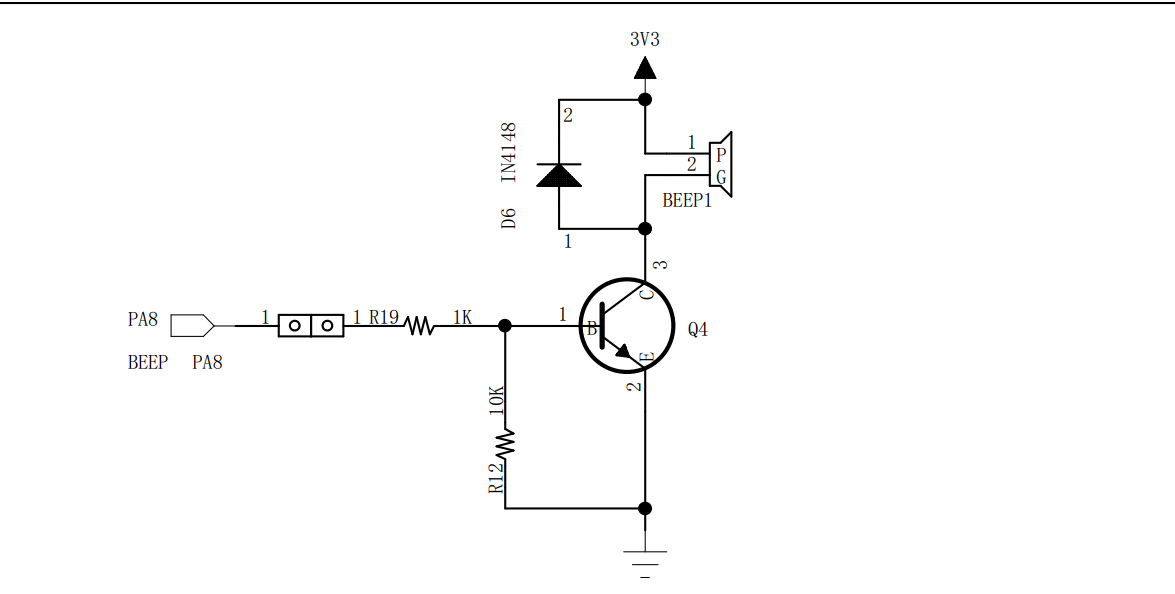
蜂鸣器分无源和有源两种,从电路上来看,这两种蜂鸣器在这都可以工作,区别是单片机程序不一样。
当节点Beep为高电平时,三极管Q4截止,蜂鸣器无电流,不响。
当节点Beep为低电平时,三极管Q4导通,蜂鸣器有电流,会响。
所以在Beep节点输入PWM脉冲时,蜂鸣器就会发出响声。
更多内容参考:蜂鸣器原理与实现方法 - 知乎 (zhihu.com)
有源和无源蜂鸣器两者有什么不一样?如何进行区分? - 21ic电子网
2. 软件设计
2.1 蜂鸣器相关参数宏定义
#ifndef __BEEP_H
#define __BEEP_H
#include "stm32f10x.h"
// 定义蜂鸣器连接的GPIO端口, 用户只需要修改下面的代码即可改变控制的蜂鸣器引脚 */
#define BEEP_GPIO_PORT GPIOA // 蜂鸣器使用的GPIO端口
#define BEEP_GPIO_CLK RCC_APB2Periph_GPIOA // 开启GPIOA端口时钟
#define BEEP_GPIO_PIN GPIO_Pin_8 // 连接到蜂鸣器的GPIO的引脚
// 高电平时,蜂鸣器响 */
#define ON 1
#define OFF 0
// 带参宏,可以像内联函数一样使用 */
#define BEEP(a) if (a) \
GPIO_SetBits(BEEP_GPIO_PORT,BEEP_GPIO_PIN);\
else \
GPIO_ResetBits(BEEP_GPIO_PORT,BEEP_GPIO_PIN)
void BEEP_GPIO_Config(void);
#endif
上面使用了一个带参宏,可能C语言基础薄弱的看不懂,我们这里来复习一下:
其实就是宏定义了一个函数,以上面的BEEP(a)为例,当函数传入一个非零即真的时候执行if(a)下面的语句,当为假就执行else下面的语句,理解了带参宏,再来认识一下GPIO_SetBits()和GPIO_ResetBits(),简单来说就是控制GPIO引脚的电平状态,下面是具体的介绍:
-
GPIO_SetBits(BEEP_GPIO_PORT, BEEP_GPIO_PIN);
这行代码将BEEP_GPIO_PIN引脚在BEEP_GPIO_PORT端口设置为高电平。常用于使 GPIO 引脚输出高电压信号(例如 3.3V 或 5V)。 -
GPIO_ResetBits(BEEP_GPIO_PORT, BEEP_GPIO_PIN);
这行代码将BEEP_GPIO_PIN引脚在BEEP_GPIO_PORT端口设置为低电平。常用于使 GPIO 引脚输出低电压信号(例如 0V)。
再对照我们的宏定义,是不是豁然开朗了呢😄
2.2 蜂鸣器初始化函数
#include "bsp_beep.h"
// 蜂鸣器初始化函数
void BEEP_GPIO_Config(void)
{
// 定义一个GPIO_InitTypeDef类型的结构体
GPIO_InitTypeDef GPIO_InitStructure;
// 开启控制蜂鸣器的GPIO的端口时钟
RCC_APB2PeriphClockCmd(BEEP_GPIO_CLK, ENABLE);
// 选择要控制蜂鸣器的GPIO
GPIO_InitStructure.GPIO_Pin = BEEP_GPIO_PIN;
// 设置GPIO模式为通用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
// 设置GPIO速率为50MHz
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// 调用库函数,初始化控制蜂鸣器的GPIO
GPIO_Init(BEEP_GPIO_PORT, &GPIO_InitStructure);
// 关闭蜂鸣器
GPIO_ResetBits(BEEP_GPIO_PORT, BEEP_GPIO_PIN);
}
2.3 主函数
#include "stm32f10x.h"
#include "./beep/bsp_beep.h"
// 函数声明
void Delay(__IO u32 nCount);
int main(void)
{
// 蜂鸣器初始化
BEEP_GPIO_Config();
while(1)
{
BEEP(ON); // 打开蜂鸣器
Delay(0x0FFFFF); // 延迟
BEEP( OFF );
Delay(0x0FFFFF);
}
}
// 延时函数
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
3. 小结
这个实验还是比较简单,主要就是配置蜂鸣器初始化函数了,但是作为初学者我们还是得好好分析一下子,从beep头文件开始
- 首先就是要定义端口、时钟、引脚了
#define BEEP_GPIO_PORT GPIOA // 蜂鸣器使用的GPIO端口
#define BEEP_GPIO_CLK RCC_APB2Periph_GPIOA // 开启GPIOA端口时钟
#define BEEP_GPIO_PIN GPIO_Pin_8 // 连接到蜂鸣器的GPIO的引脚
这个我们了解过工程模板和参考以前的知识就知道了,我们要利用单片机驱动某个对象,首先确立我们要使用的端口,确立了端口就打开对应的时钟呗,之后规定我们要连接的引脚
- 我们知道,有源蜂鸣器,高电平1响,0就关,为了代码可读性,我们使用宏定义
#define ON 1
#define OFF 0
随后我们分析一下beep.c,其实这没什么可分析的,都是使用的库函数,我们直接填几个参数就行了
void BEEP_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启控制蜂鸣器的GPIO的端口时钟*/
RCC_APB2PeriphClockCmd(BEEP_GPIO_CLK, ENABLE);
/*选择要控制蜂鸣器的GPIO*/
GPIO_InitStructure.GPIO_Pin = BEEP_GPIO_PIN;
/*设置GPIO模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置GPIO速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化控制蜂鸣器的GPIO*/
GPIO_Init(BEEP_GPIO_PORT, &GPIO_InitStructure);
// 关闭蜂鸣器
GPIO_ResetBits(BEEP_GPIO_PORT, BEEP_GPIO_PIN);
}
但是初次使用库函数,我们怎么能不分析,下面一一道来:
- 在嵌入式编程中,特别是在使用 STM32 等微控制器时,结构体常用于配置硬件外设。我们在
BEEP_GPIO_Config函数中定义的GPIO_InitTypeDef结构体是用来配置 GPIO 引脚的属性的。也可以看到,后面的配置都需要这个结构体
这个结构体包含了用于配置 GPIO 引脚的各种设置,例如引脚号、模式、速率等:
typedef struct
{
uint16_t GPIO_Pin; /*!< 指定要配置的 GPIO 引脚。
这个参数可以是 GPIO_Pin_x 的任意组合,其中 x 可以是 (0..15) */
GPIOMode_TypeDef GPIO_Mode; /*!< 指定所选引脚的操作模式。
这个参数可以是 @ref GPIOMode_TypeDef 的一个值 */
GPIOOType_TypeDef GPIO_OType; /*!< 指定所选引脚的输出类型。
这个参数可以是 @ref GPIO_OType_TypeDef 的一个值 */
GPIOPuPd_TypeDef GPIO_PuPd; /*!< 指定所选引脚的上拉或下拉激活状态。
这个参数可以是 @ref GPIOPuPd_TypeDef 的一个值 */
GPIOSpeed_TypeDef GPIO_Speed; /*!< 指定所选引脚的速度。
这个参数可以是 @ref GPIOSpeed_TypeDef 的一个值 */
} GPIO_InitTypeDef;
RCC_APB2PeriphClockCmd是一个 STM32 微控制器库函数,用于配置和控制 APB2 总线上的外设时钟。具体来说,它用来启用或禁用 APB2 总线上的外设时钟,这样可以控制外设的时钟源,以确保外设可以正常工作。
在 STM32 的标准外设库中,RCC_APB2PeriphClockCmd 的函数原型如下:
void RCC_APB2PeriphClockCmd(uint32_t RCC_APB2Periph, FunctionalState NewState); // 函数参数:端口时钟,使能与否
-
GPIO_InitStructure.GPIO_Pin = BEEP_GPIO_PIN;:通过我们的结构体设置GPIO要控制的引脚
-
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;:通过我们的结构体设置GPIO的模式-这里我们设置为推挽输出模式
-
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;:通过我们的结构体设置GPIO的引脚速率-我们这里设置50Mhz
-
GPIO_Init(BEEP_GPIO_PORT, &GPIO_InitStructure);是 STM32 微控制器库函数中的一个重要函数,用于初始化和配置指定的 GPIO(通用输入/输出)端口及其引脚。我们可以看一下函数原型
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
重点是理解函数参数:
GPIOx:
- 类型:
GPIO_TypeDef* - 描述:指定要初始化的 GPIO 端口。
GPIOx是一个指向 GPIO 端口寄存器的指针,例如GPIOA,GPIOB,GPIOC等。这个参数决定了你要配置哪个端口的引脚。
例如,如果你传入 GPIOA,那么函数会配置 GPIOA 端口的引脚。
GPIO_InitStruct:
- 类型:
GPIO_InitTypeDef* - 描述:指向一个
GPIO_InitTypeDef结构体的指针,这个结构体包含了配置 GPIO 引脚所需的所有设置,例如引脚号、模式、输出类型、上拉/下拉电阻以及速度等。
你需要先设置好这个结构体,然后将其地址传递给 GPIO_Init 函数。
- GPIO_ResetBits(BEEP_GPIO_PORT, BEEP_GPIO_PIN);:最后这个我们已经学习过了,就是给GPIO低电平,我们这里使用的有源蜂鸣器,低电平关闭
以后的整体结构差不多都是这样
-
定义一个结构体(通常为GPIO_InitTypeDef GPIO_InitStructure;)
-
开启GPIO的时钟(参数:XXX_GPIO_PIN,ENABLE)
-
选择要控制引脚(选择XXX_GPIO_PIN)
-
选择输出模式(可选OD\PP)
-
设置速率(可选5,10,50)MHz
-
调用库函数,进行初始化(参数:端口,引用结构体)
-
调用函数关闭对象(参数:端口,引脚)
那主函数更不必说了
#include "stm32f10x.h"
#include "./beep/bsp_beep.h"
void Delay(__IO u32 nCount);
int main(void)
{
// 初始化蜂鸣器GPIO
BEEP_GPIO_Config();
while(1)
{
BEEP( ON ); // 开启蜂鸣器
Delay(0x0FFFFF);
BEEP( OFF );
Delay(0x0FFFFF);
}
}
// 延时函数
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
首先就是初始化beep了,之后想让蜂鸣器响,就是不断发送脉冲咯,就是不断的开->延时->关->延时
2024.7.21 第一次修订
2024.8.19 第二次修订,后期不再维护
2024.12.9 修补部分内容,优化结构

 浙公网安备 33010602011771号
浙公网安备 33010602011771号