
cartographer代码阅读(4)——世界坐标系点和像素坐标系点的转换
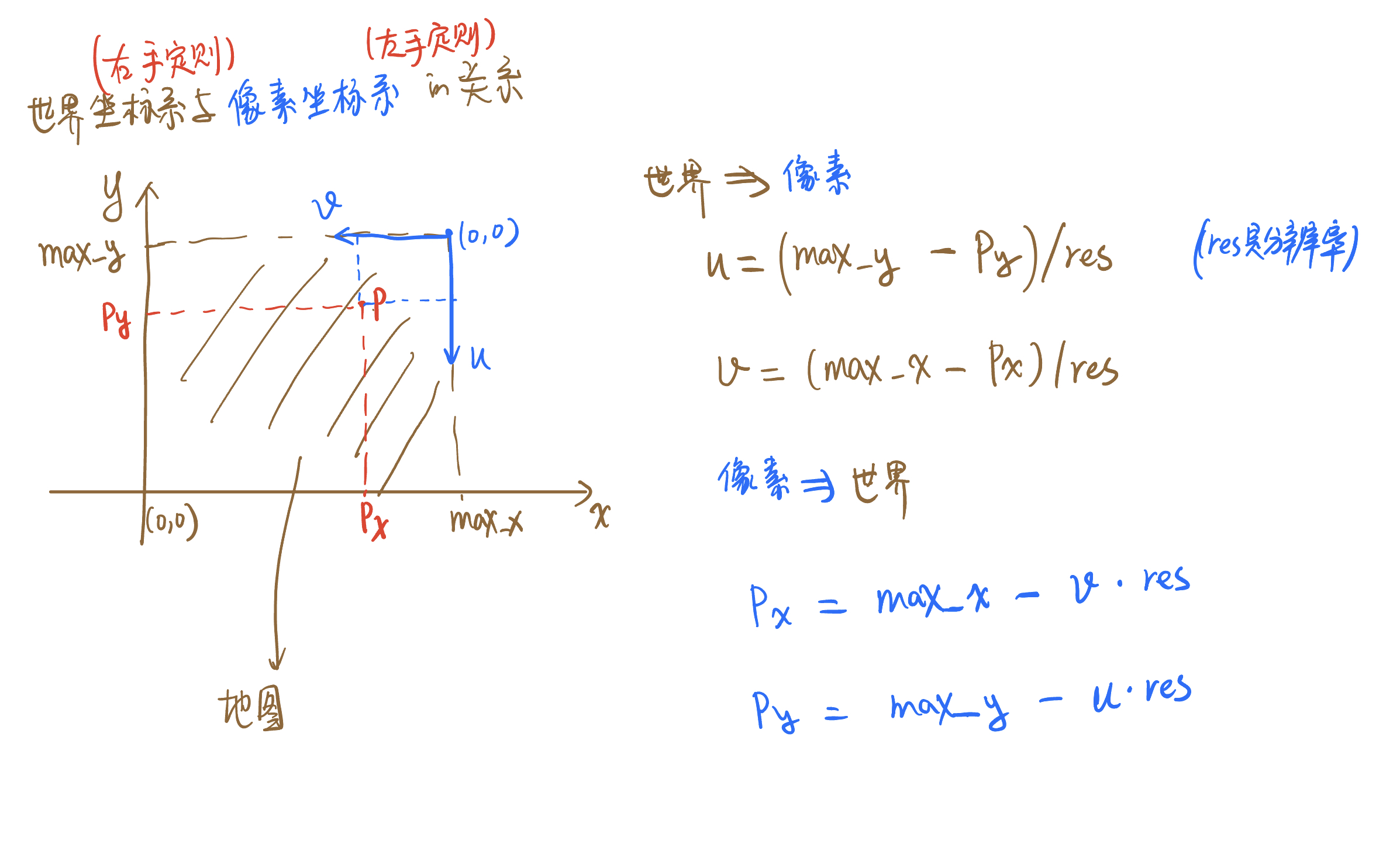
构建栅格地图,要弄清楚坐标之间的关系。本篇根据代码,画出了坐标转换的关系。
如下图:
由于像素坐标系通常都是从左上角开始,所以把上面的图旋转一下:
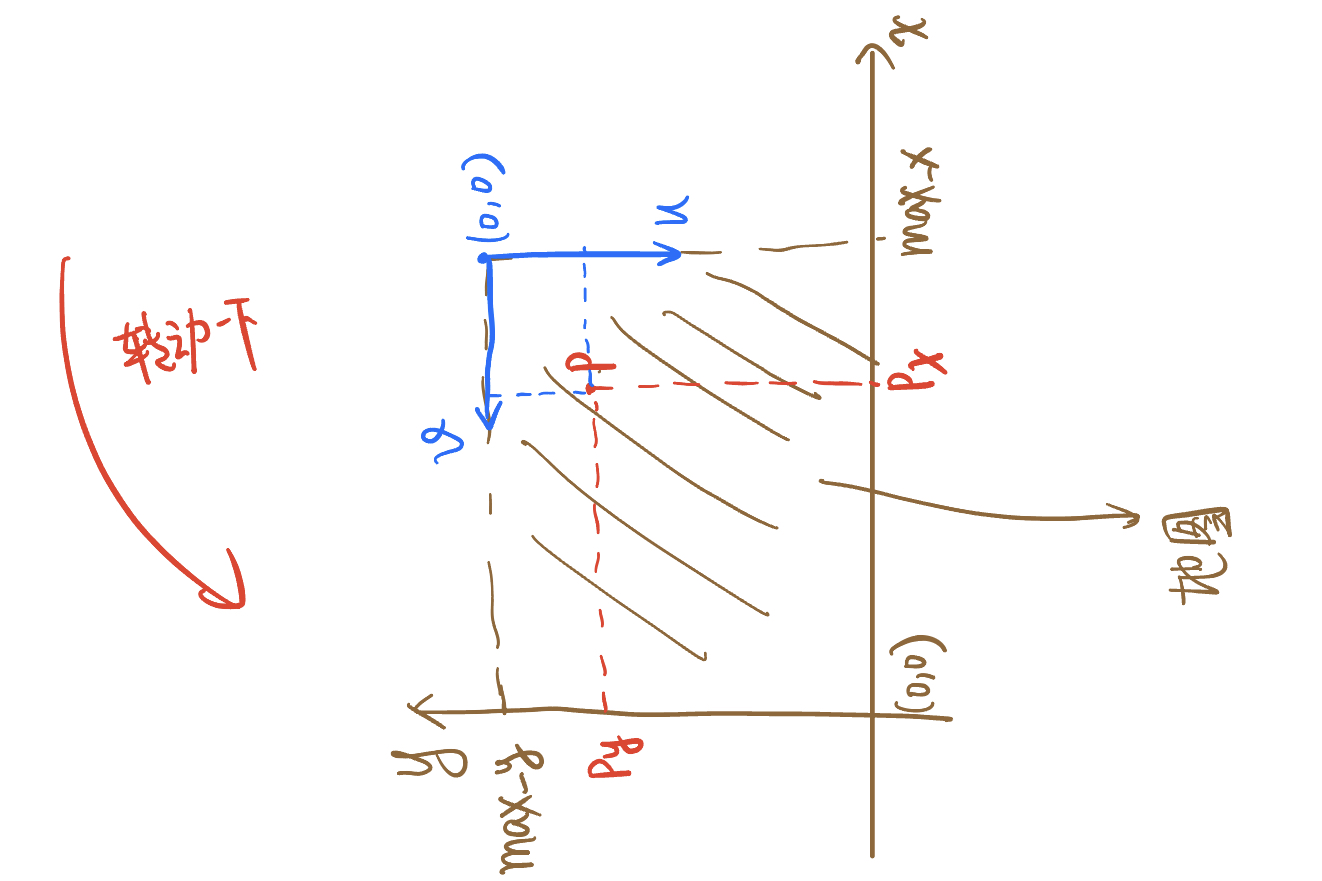
这样就清晰了。可以看到,cartographer地图坐标系的原点在地图的右下角,只不过x轴朝上,y轴朝右。在实际转换的时候,直接在标准世界坐标系下画好图就好了,并不需要去死记坐标系原点的方位在哪。
cartographer中的坐标转换的代码如下:
// Returns the index of the cell containing the 'point' which may be outside // the map, i.e., negative or too large indices that will return false for // Contains(). Eigen::Array2i GetCellIndex(const Eigen::Vector2f& point) const { // Index values are row major and the top left has Eigen::Array2i::Zero() // and contains (centered_max_x, centered_max_y). We need to flip and // rotate. return Eigen::Array2i( common::RoundToInt((max_.y() - point.y()) / resolution_ - 0.5), common::RoundToInt((max_.x() - point.x()) / resolution_ - 0.5)); } // Returns the center of the cell at 'cell_index'. Eigen::Vector2f GetCellCenter(const Eigen::Array2i cell_index) const { return {max_.x() - resolution() * (cell_index[1] + 0.5), max_.y() - resolution() * (cell_index[0] + 0.5)}; }
——————————————————————————————————————————————————————————————————————————————————————
再深入看构建栅格地图的过程,就可以发现,这个世界坐标系的原点,其实是插入新子图时,对应关键激光帧的pose为地图原点,这和许多建图算法是一致的。且地图原点位于像素坐标系下的中心。如下图,对上面的图做了一些调整,看的更清晰。
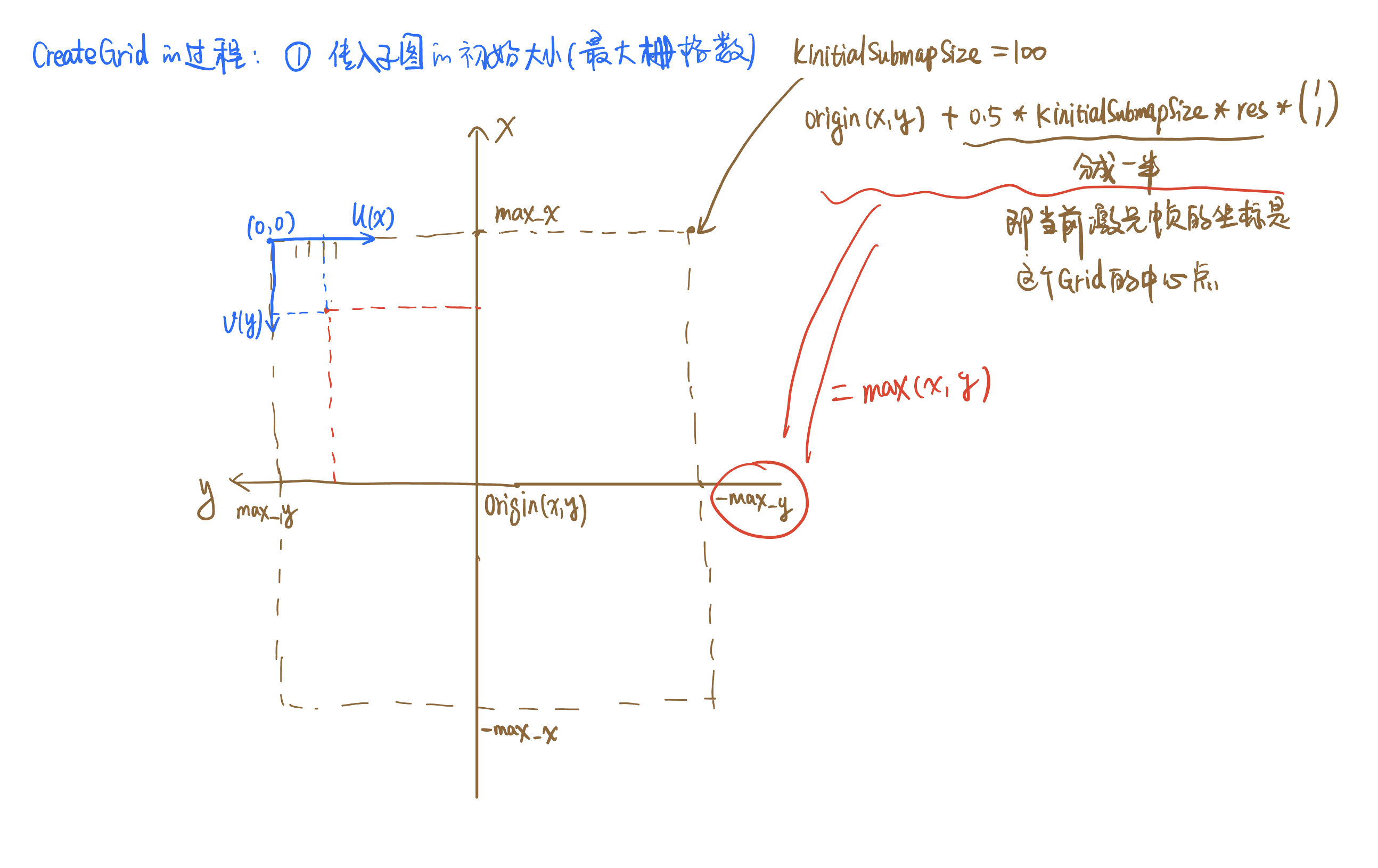
cartographer中对应的具体的代码如下:
case proto::GridOptions2D::PROBABILITY_GRID: return absl::make_unique<ProbabilityGrid>( MapLimits(resolution, origin.cast<double>() + 0.5 * kInitialSubmapSize * resolution * Eigen::Vector2d::Ones(), CellLimits(kInitialSubmapSize, kInitialSubmapSize)), &conversion_tables_);
作者:水水滴答
本文版权归作者和博客园共有,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号